捷联惯导与组合导航.30页PPT
- 格式:ppt
- 大小:2.45 MB
- 文档页数:30


捷联惯导算法与组合导航原理讲义严恭敏,翁浚编著西北工业大学2016-9前言近年来,惯性技术不论在军事上、工业上,还是在民用上,特别是消费电子产品领域,都获得了广泛的应用,大到潜艇、舰船、高铁、客机、导弹和人造卫星,小到医疗器械、电动独轮车、小型四旋翼无人机、空中鼠标和手机,都有惯性技术存在甚至大显身手的身影。
相应地,惯性技术的研究和开发也获得前所未有的蓬勃发展,越来越多的高校学生、爱好者和工程技术人员加入到惯性技术的研发队伍中来。
惯性技术涉及面广,涵盖元器件技术、测试设备和测试方法、系统集成技术和应用开发技术等方面,囿于篇幅和作者知识面限制,本书主要讨论捷联惯导系统算法方面的有关问题,包括姿态算法基本理论、捷联惯导更新算法与误差分析、组合导航卡尔曼滤波原理、捷联惯导系统的初始对准技术、组合导航系统建模以及算法仿真等内容。
希望读者参阅之后能够对捷联惯导算法有个系统而深入的理解,并能快速而有效地将基本算法应用于解决实际问题。
本书在编写和定稿过程中得到以下同行的热心支持,指出了不少错误之处或提出了许多宝贵的修改建议,深表谢意:西北工业大学自动化学院:梅春波、赵彦明、刘洋、沈彦超、肖迅、牟夏、郑江涛、刘士明、金竹、冯理成、赵雪华;航天科工第九总体设计部:王亚军;辽宁工程技术大学:丁伟;北京腾盛科技有限公司:刘兴华;东南大学:童金武;中国农业大学:包建华;南京航空航天大学:赵宣懿;武汉大学:董翠军;网友:Zoro;山东科技大学:王云鹏。
书中缺点和错误在所难免,望读者不吝批评指正.作者2016年9月目录第1章概述 (6)1.1捷联惯导算法简介 (6)1.2 Kalman滤波与组合导航原理简介 (7)第2章捷联惯导姿态解算基础 (10)2。
1反对称阵及其矩阵指数函数 (10)2。
1。
1 反对称阵 (10)2。
1.2 反对称阵的矩阵指数函数 (12)2。
2方向余弦阵与等效旋转矢量 (13)2.2.1 方向余弦阵 (13)2。
捷联惯导算法与组合导航原理讲义严恭敏,翁浚编著西北工业大学2021-9前言近年来,惯性技术不管在军事上、工业上,还是在民用上,特别是消费电子产品领域,都获得了广泛的应用,大到潜艇、舰船、高铁、客机、导弹和人造卫星,小到医疗器械、电动独轮车、小型四旋翼无人机、空中鼠标和手机,都有惯性技术存在甚至大显身手的身影。
相应地,惯性技术的研究和开发也获得前所未有的蓬勃开展,越来越多的高校学生、爱好者和工程技术人员参加到惯性技术的研发队伍中来。
惯性技术涉及面广,涵盖元器件技术、测试设备和测试方法、系统集成技术和应用开发技术等方面,囿于篇幅和作者知识面限制,本书主要讨论捷联惯导系统算法方面的有关问题,包括姿态算法根本理论、捷联惯导更新算法与误差分析、组合导航卡尔曼滤波原理、捷联惯导系统的初始对准技术、组合导航系统建模以及算法仿真等内容。
希望读者参阅之后可以对捷联惯导算法有个系统而深化的理解,并能快速而有效地将根本算法应用于解决实际问题。
本书在编写和定稿过程中得到以下同行的热心支持,指出了不少错误之处或提出了许多珍贵的修改建议,深表谢意:西北工业大学自动化学院:梅春波、赵彦明、刘洋、沈彦超、肖迅、牟夏、郑江涛、刘士明、金竹、冯理成、赵雪华;航天科工第九总体设计部:王亚军;辽宁工程技术大学:丁伟;北京腾盛科技:刘兴华;东南大学:童金武;中国农业大学:包建华;南京航空航天大学:赵宣懿;武汉大学:董翠军;网友:Zoro;山东科技大学:王云鹏。
书中缺点和错误在所难免,望读者不吝批评指正。
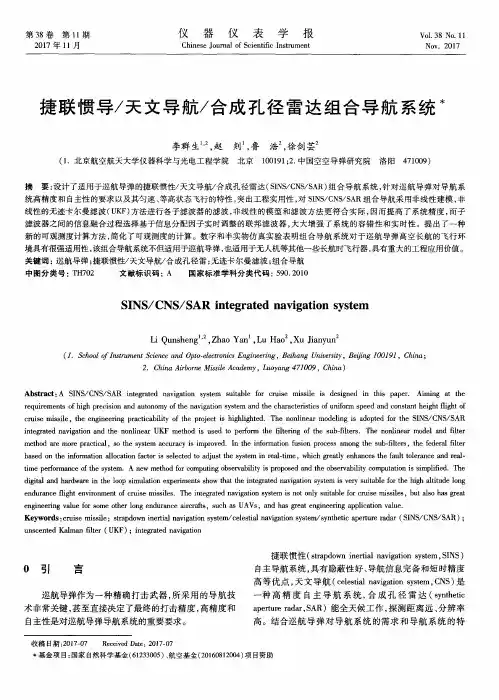
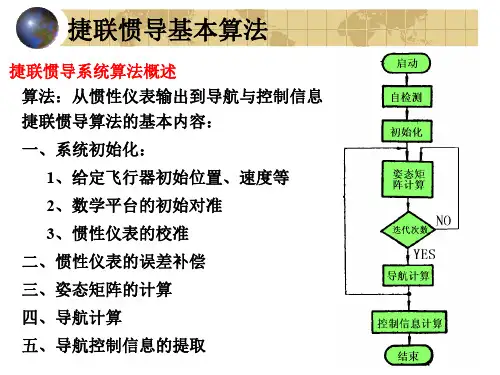
作者2021年9月目录第1章概述 (6)捷联惯导算法简介 (6)1.2 Kalman滤波与组合导航原理简介 (7)第2章捷联惯导姿态解算根底 (10)反对称阵及其矩阵指数函数 (10)2.1.1 反对称阵 (10)2.1.2 反对称阵的矩阵指数函数 (12)方向余弦阵与等效旋转矢量 (13)2.2.1 方向余弦阵 (13)2.2.2 等效旋转矢量 (14)方向余弦阵微分方程及其求解 (16)2.3.1 方向余弦阵微分方程 (16)2.3.2 方向余弦阵微分方程的求解 (17)姿态更新的四元数表示 (19)2.4.1 四元数的根本概念 (19)2.4.2 四元数微分方程 (23)2.4.3 四元数微分方程的求解 (24)等效旋转矢量微分方程及其泰勒级数解 (26)2.5.1 等效旋转矢量微分方程 (26)2.5.2 等效旋转矢量微分方程的泰勒级数解 (29)圆锥运动条件下的等效旋转矢量算法 (31)2.6.1 圆锥运动的描绘 (31)2.6.2 圆锥误差补偿算法 (33)第3章地球形状与重力场根底 (40)地球的形状描绘 (40)地球的正常重力场 (46)地球重力场的球谐函数模型 (50)3.3.1 球谐函数的根本概念 (50)3.3.2 地球引力位函数 (58)3.3.3 重力位及重力计算 (63)第4章捷联惯导更新算法及误差分析 (69)4.1捷联惯导数值更新算法 (69)4.1.1 姿态更新算法 (69)4.1.2 速度更新算法 (70)4.1.3 位置更新算法 (76)捷联惯导误差方程 (76)惯性传感器测量误差 (76)姿态误差方程 (78)速度误差方程 (79)位置误差方程 (79)误差方程的整理 (80)静基座误差特性分析 (82)4.3.1 静基座误差方程 (82)4.3.2 高度通道 (83)4.3.3 程度通道 (83)4.3.4 程度通道的简化 (88)4.3.5 程度通道误差方程的仿真 (90)第5章卡尔曼滤波根本理论 (92)递推最小二乘法 (92)5.2 Kalman滤波方程的推导 (94)连续时间随机系统的离散化与连续时间Kalman滤波 (101)噪声相关条件下的Kalman滤波 (107)序贯滤波 (111)信息滤波与信息交融 (113)平方根滤波 (116)遗忘滤波 (123)5.9 Sage-Husa自适应滤波 (125)最优平滑算法 (126)非线性系统的EKF滤波、二阶滤波与迭代滤波 (129)间接滤波与滤波校正 (135)联邦滤波〔待完善〕 (135)滤波的稳定性与可观测度分析 (140)第6章初始对准及组合导航技术 (146)捷联惯导粗对准 (146)矢量定姿原理 (146)解析粗对准方法 (148)间接粗对准方法 (151)捷联惯导精对准 (152)惯性/卫星组合导航 (156)空间杆臂误差 (156)时间不同步误差 (157)状态空间模型 (157)车载惯性/里程仪组合导航 (158)航位推算算法 (158)航位推算误差分析 (160)6.惯性/里程仪组合 (163)低本钱姿态航向参考系统〔AHRS〕 (166)简化的惯导算法及误差方程 (166)6地磁场测量及误差方程 (168)低本钱组合导航系统模型 (169)低本钱惯导的姿态初始化 (170).5捷联式地平仪的工作原理 (172)第7章捷联惯导与组合导航仿真 (175)飞行轨迹和惯性器件信息仿真 (175)飞行轨迹设计 (175)7.1.2 捷联惯导反演算法 (176)7.1.3 仿真 (177)捷联惯导仿真 (179)7.2.1 Matlab子函数 (179)捷联惯导仿真主程序 (184)惯导/卫星组合导航仿真 (184)子函数 (184)组合导航仿真主程序 (186)附录 (188)A一些重要的三维矢量运算关系 (188)B 运载体姿态的欧拉角描绘 (190)C 姿态更新的毕卡算法、龙格—库塔算法及准确数值解法 (197)D 从非直角坐标系到直角坐标系的矩阵变换 (205)E 线性系统根本理论 (209)F 加权最小二乘估计 (214)G 矩阵求逆引理 (215)H 几种矩阵分解方法〔QR、Cholesky与UD〕 (217)I 二阶滤波中的引理证明 (221)J 方差阵上界的证明 (223)K 三阶非奇异方阵的奇异值分解 (224)L Matlab仿真程序 (229)M 练习题 (235)参考文献 (239)第1章概述第1章概述 (6)捷联惯导算法简介 (6)1.2 Kalman滤波与组合导航原理简介 (7)1.1捷联惯导算法简介在捷联惯导系统〔SINS〕中惯性测量器件〔陀螺和加速度计〕直接与运载体固联,通过导航计算机采集惯性器件的输出信息并进展数值积分求解运载体的姿态、速度和位置等导航参数,这三组参数的求解过程即所谓的姿态更新算法、速度更新算法和位置更新算法。

捷联惯导算法与组合导航原理讲义严恭敏,翁浚编著西北工业大学2021-9前言近年来,惯性技术不管在军事上、工业上,还是在民用上,特别是消费电子产品领域,都获得了广泛的应用,大到潜艇、舰船、高铁、客机、导弹和人造卫星,小到医疗器械、电动独轮车、小型四旋翼无人机、空中鼠标和手机,都有惯性技术存在甚至大显身手的身影。
相应地,惯性技术的研究和开发也获得前所未有的蓬勃开展,越来越多的高校学生、爱好者和工程技术人员参加到惯性技术的研发队伍中来。
惯性技术涉及面广,涵盖元器件技术、测试设备和测试方法、系统集成技术和应用开发技术等方面,囿于篇幅和作者知识面限制,本书主要讨论捷联惯导系统算法方面的有关问题,包括姿态算法根本理论、捷联惯导更新算法与误差分析、组合导航卡尔曼滤波原理、捷联惯导系统的初始对准技术、组合导航系统建模以及算法仿真等内容。
希望读者参阅之后可以对捷联惯导算法有个系统而深化的理解,并能快速而有效地将根本算法应用于解决实际问题。
本书在编写和定稿过程中得到以下同行的热心支持,指出了不少错误之处或提出了许多珍贵的修改建议,深表谢意:西北工业大学自动化学院:梅春波、赵彦明、刘洋、沈彦超、肖迅、牟夏、郑江涛、刘士明、金竹、冯理成、赵雪华;航天科工第九总体设计部:王亚军;辽宁工程技术大学:丁伟;北京腾盛科技:刘兴华;东南大学:童金武;中国农业大学:包建华;南京航空航天大学:赵宣懿;武汉大学:董翠军;网友:Zoro;山东科技大学:王云鹏。
书中缺点和错误在所难免,望读者不吝批评指正。
作者2021年9月目录第1章概述 (6)捷联惯导算法简介 (6)1.2 Kalman滤波与组合导航原理简介 (7)第2章捷联惯导姿态解算根底 (10)反对称阵及其矩阵指数函数 (10)2.1.1 反对称阵 (10)2.1.2 反对称阵的矩阵指数函数 (12)方向余弦阵与等效旋转矢量 (13)2.2.1 方向余弦阵 (13)2.2.2 等效旋转矢量 (14)方向余弦阵微分方程及其求解 (16)2.3.1 方向余弦阵微分方程 (16)2.3.2 方向余弦阵微分方程的求解 (17)姿态更新的四元数表示 (19)2.4.1 四元数的根本概念 (19)2.4.2 四元数微分方程 (23)2.4.3 四元数微分方程的求解 (24)等效旋转矢量微分方程及其泰勒级数解 (26)2.5.1 等效旋转矢量微分方程 (26)2.5.2 等效旋转矢量微分方程的泰勒级数解 (29)圆锥运动条件下的等效旋转矢量算法 (31)2.6.1 圆锥运动的描绘 (31)2.6.2 圆锥误差补偿算法 (33)第3章地球形状与重力场根底 (40)地球的形状描绘 (40)地球的正常重力场 (46)地球重力场的球谐函数模型 (50)3.3.1 球谐函数的根本概念 (50)3.3.2 地球引力位函数 (58)3.3.3 重力位及重力计算 (63)第4章捷联惯导更新算法及误差分析 (69)4.1捷联惯导数值更新算法 (69)4.1.1 姿态更新算法 (69)4.1.2 速度更新算法 (70)4.1.3 位置更新算法 (76)捷联惯导误差方程 (76)惯性传感器测量误差 (76)姿态误差方程 (78)速度误差方程 (79)位置误差方程 (79)误差方程的整理 (80)静基座误差特性分析 (82)4.3.1 静基座误差方程 (82)4.3.2 高度通道 (83)4.3.3 程度通道 (83)4.3.4 程度通道的简化 (88)4.3.5 程度通道误差方程的仿真 (90)第5章卡尔曼滤波根本理论 (92)递推最小二乘法 (92)5.2 Kalman滤波方程的推导 (94)连续时间随机系统的离散化与连续时间Kalman滤波 (101)噪声相关条件下的Kalman滤波 (107)序贯滤波 (111)信息滤波与信息交融 (113)平方根滤波 (116)遗忘滤波 (123)5.9 Sage-Husa自适应滤波 (125)最优平滑算法 (126)非线性系统的EKF滤波、二阶滤波与迭代滤波 (129)间接滤波与滤波校正 (135)联邦滤波〔待完善〕 (135)滤波的稳定性与可观测度分析 (140)第6章初始对准及组合导航技术 (146)捷联惯导粗对准 (146)矢量定姿原理 (146)解析粗对准方法 (148)间接粗对准方法 (151)捷联惯导精对准 (152)惯性/卫星组合导航 (156)空间杆臂误差 (156)时间不同步误差 (157)状态空间模型 (157)车载惯性/里程仪组合导航 (158)航位推算算法 (158)航位推算误差分析 (160)6.惯性/里程仪组合 (163)低本钱姿态航向参考系统〔AHRS〕 (166)简化的惯导算法及误差方程 (166)6地磁场测量及误差方程 (168)低本钱组合导航系统模型 (169)低本钱惯导的姿态初始化 (170).5捷联式地平仪的工作原理 (172)第7章捷联惯导与组合导航仿真 (175)飞行轨迹和惯性器件信息仿真 (175)飞行轨迹设计 (175)7.1.2 捷联惯导反演算法 (176)7.1.3 仿真 (177)捷联惯导仿真 (179)7.2.1 Matlab子函数 (179)捷联惯导仿真主程序 (184)惯导/卫星组合导航仿真 (184)子函数 (184)组合导航仿真主程序 (186)附录 (188)A一些重要的三维矢量运算关系 (188)B 运载体姿态的欧拉角描绘 (190)C 姿态更新的毕卡算法、龙格—库塔算法及准确数值解法 (197)D 从非直角坐标系到直角坐标系的矩阵变换 (205)E 线性系统根本理论 (209)F 加权最小二乘估计 (214)G 矩阵求逆引理 (215)H 几种矩阵分解方法〔QR、Cholesky与UD〕 (217)I 二阶滤波中的引理证明 (221)J 方差阵上界的证明 (223)K 三阶非奇异方阵的奇异值分解 (224)L Matlab仿真程序 (229)M 练习题 (235)参考文献 (239)第1章概述第1章概述 (6)捷联惯导算法简介 (6)1.2 Kalman滤波与组合导航原理简介 (7)1.1捷联惯导算法简介在捷联惯导系统〔SINS〕中惯性测量器件〔陀螺和加速度计〕直接与运载体固联,通过导航计算机采集惯性器件的输出信息并进展数值积分求解运载体的姿态、速度和位置等导航参数,这三组参数的求解过程即所谓的姿态更新算法、速度更新算法和位置更新算法。