捷联惯性导航系统的解算方法
- 格式:pptx
- 大小:863.02 KB
- 文档页数:59
捷联惯性导航系统的解算方法捷联惯性导航系统(Inertial Navigation System,简称INS)是一种利用陀螺仪和加速度计等惯性测量单元测量物体的加速度和角速度,然后通过对这些测量值的积分计算出物体的速度和位置的导航系统。
INS广泛应用于航空航天、无人驾驶车辆和船舶等领域,具有高精度和自主性等特点。
INS的解算方法一般分为初始对准、运动状态估计和航位推算三个主要过程。
初始对准是指在启动导航系统时,通过利用外部辅助传感器(如GPS)或静态校准等方法将惯性传感器的输出与真实姿态和位置进行初次校准。
在初始对准过程中,需要获取传感器的初始偏差和初始姿态,一般采用标定或矩阵运算等方法进行。
运动状态估计是指根据惯性传感器的测量值,使用滤波算法对物体的加速度和角速度进行实时估计。
常用的滤波算法包括卡尔曼滤波、扩展卡尔曼滤波和粒子滤波等。
其中,卡尔曼滤波是一种最优估计算法,通过对观测值和状态进行线性组合,得到对真实状态的最佳估计。
扩展卡尔曼滤波则是基于卡尔曼滤波的非线性扩展,可以应用于非线性INS系统。
粒子滤波是一种利用蒙特卡洛采样技术进行状态估计的方法,适用于非高斯分布的状态估计问题。
航位推算是指根据运动状态估计的结果,对物体的速度和位置进行推算。
INS最基本的航位推算方法是利用加速度值对速度进行积分,然后再对速度进行积分得到位置。
但是,在实际应用中,由于传感器本身存在噪声和漂移等误差,导致航位推算过程会出现积分漂移现象。
为了解决这个问题,通常采用辅助传感器(如GPS)和地图等数据对INS的输出进行校正和修正。
当前,还有一些先进的INS解算方法被提出,如基于深度学习的INS 解算方法。
这些方法利用神经网络等深度学习模型,结合原始传感器数据进行端到端的学习和预测,以实现更高精度的位置和姿态估计。
综上所述,捷联惯性导航系统的解算方法主要包括初始对准、运动状态估计和航位推算三个过程。
其中,运动状态估计过程利用滤波算法对传感器的测量值进行处理,得到物体的加速度和角速度的估计。
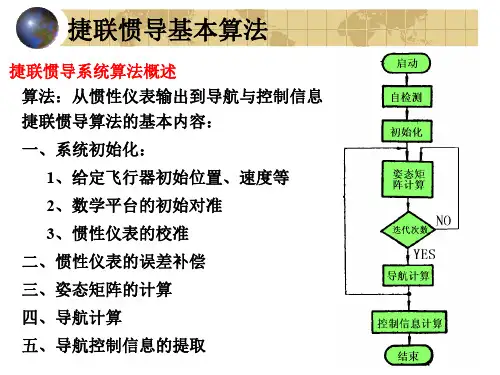

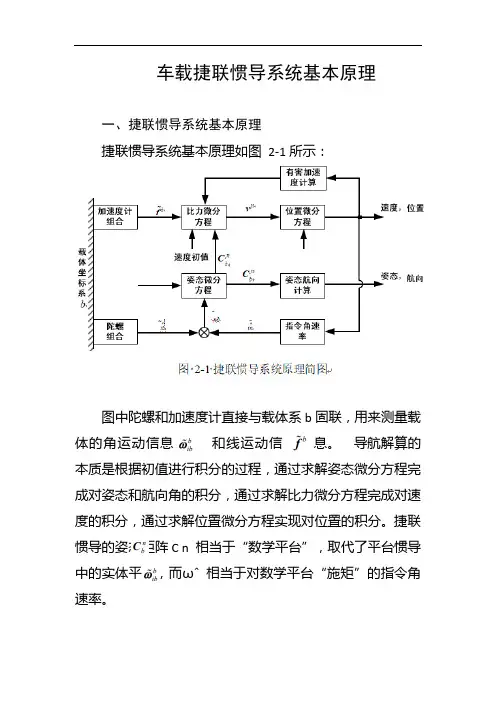
车载捷联惯导系统基本原理一、捷联惯导系统基本原理捷联惯导系统基本原理如图2-1所示:图中陀螺和加速度计直接与载体系b固联,用来测量载体的角运动信息和线运动信息。
导航解算的本质是根据初值进行积分的过程,通过求解姿态微分方程完成对姿态和航向角的积分,通过求解比力微分方程完成对速度的积分,通过求解位置微分方程实现对位置的积分。
捷联惯导的姿态矩阵C n 相当于“数学平台”,取代了平台惯导中的实体平台,而ωˆ相当于对数学平台“施矩”的指令角速率。
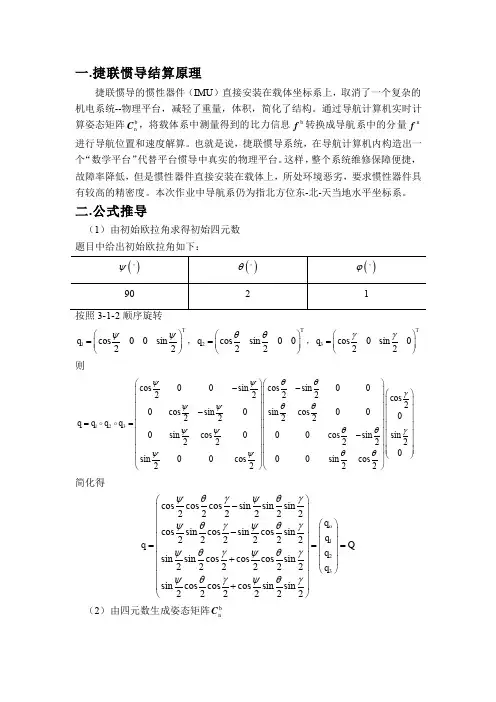
二、捷联惯导微分方程(一)姿态微分方程在捷联惯导系统中,导航坐标系n 和载体坐标系b 之间的角位置关系通常用姿态矩阵、四元数和欧拉角表示,相应也存在姿态矩阵微分方程、四元数微分方程和欧拉角微分方程三种形式。
姿态矩阵微分方程的表达式为:在欧拉角微分方程式(2.2-7)中,当俯仰角θ趋于90º时,cosθ趋于0,tanθ趋于无穷,方程存在奇异性,所以这种方法不能在全姿态范围内正常工作;姿态矩阵微分方程式(2.2-1)可全姿态工作,但姿态矩阵更新相当于求解包含9个未知量的线性微分方程组,计算量大;四元数微分方程式(2.2-6)同样可以全姿态工作,且更新算法只需求解4个未知量的线性微分方程组,计算量小,算法简单,是较实用的工程算法。
(二)速度微分方程速度微分方程即比力方程,是惯性导航解算的基本关系式:三、捷联惯性导航算法捷联惯导解算的目的是根据惯性器件输出求解载体姿态、速度和位置等导航信息,实际上就是求解三个微分方程的过程,相应存在姿态更新算法、速度更新算法和位置更新算法。
(一)姿态更新算法求解微分方程式(2.2-6)可得四元数姿态更新算法为:在车辆行驶过程中,一般不存在高频大机动环境,并且车载导航系统往往不工作在纯惯性导航方式,而是利用里程仪或零速条件进行组合导航,所以算法误差的影响有限,常用的5ms采样周期和二子样优化算法即可满足要求。
四、捷联惯导误差模型传感器误差、初值误差和算法误差是SINS的主要误差源,其中器件误差和初值误差又是影响导航结果的主要因素。

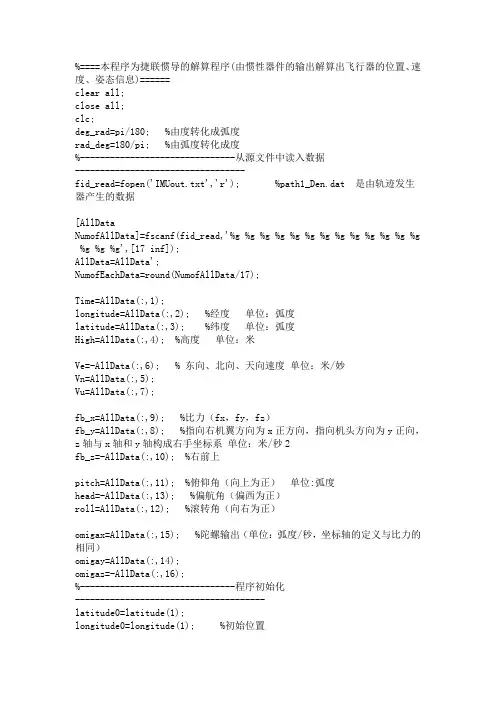
%====本程序为捷联惯导的解算程序(由惯性器件的输出解算出飞行器的位置、速度、姿态信息)======clear all;close all;clc;deg_rad=pi/180; %由度转化成弧度rad_deg=180/pi; %由弧度转化成度%-------------------------------从源文件中读入数据----------------------------------fid_read=fopen('IMUout.txt','r'); %path1_Den.dat 是由轨迹发生器产生的数据[AllDataNumofAllData]=fscanf(fid_read,'%g %g %g %g %g %g %g %g %g %g %g %g %g %g %g %g',[17 inf]);AllData=AllData';NumofEachData=round(NumofAllData/17);Time=AllData(:,1);longitude=AllData(:,2); %经度单位:弧度latitude=AllData(:,3); %纬度单位:弧度High=AllData(:,4); %高度单位:米Ve=-AllData(:,6); % 东向、北向、天向速度单位:米/妙Vn=AllData(:,5);Vu=AllData(:,7);fb_x=AllData(:,9); %比力(fx,fy,fz)fb_y=AllData(:,8); %指向右机翼方向为x正方向,指向机头方向为y正向,z轴与x轴和y轴构成右手坐标系单位:米/秒2fb_z=-AllData(:,10); %右前上pitch=AllData(:,11); %俯仰角(向上为正)单位:弧度head=-AllData(:,13); %偏航角(偏西为正)roll=AllData(:,12); %滚转角(向右为正)omigax=AllData(:,15); %陀螺输出(单位:弧度/秒,坐标轴的定义与比力的相同)omigay=AllData(:,14);omigaz=-AllData(:,16);%-------------------------------程序初始化--------------------------------------latitude0=latitude(1);longitude0=longitude(1); %初始位置High0=High(1);Ve0=Ve(1);Vn0=Vn(1); %初始速度Vu0=Vu(1);pitch0=pitch(1);head0=head(1); %初始姿态roll0=roll(1);TimeEach=0.005; %周期和仿真总时间TimeAll=(NumofEachData-1)*TimeEach;Omega_ie=0.7292115147E-4;%0.00007272205216643040; %地球自转角速度单位:弧度每妙g0=9.78;%------------------------------导航解算开始--------------------------------------%假设没有初始对准误差pitch_err0=pitch0+0*deg_rad;head_err0=head0+0*deg_rad;roll_err0=roll0+0*deg_rad;%初始捷联矩阵的计算《捷联惯导系统》P63 旋转顺序 head - pitch - roll %导航坐标系n为东北天方向载体坐标系b为右前上偏航角北偏西为正Tbn(1,1)=cos(roll_err0)*cos(head_err0)-sin(roll_err0)*sin(pitch_err0) *sin(head_err0);Tbn(1,2)=cos(roll_err0)*sin(head_err0)+sin(roll_err0)*sin(pitch_err0) *cos(head_err0);Tbn(1,3)=-sin(roll_err0)*cos(pitch_err0);Tbn(2,1)=-cos(pitch_err0)*sin(head_err0);Tbn(2,2)=cos(pitch_err0)*cos(head_err0);Tbn(2,3)=sin(pitch_err0);Tbn(3,1)=sin(roll_err0)*cos(head_err0)+cos(roll_err0)*sin(pitch_err0) *sin(head_err0);Tbn(3,2)=sin(roll_err0)*sin(head_err0)-cos(roll_err0)*sin(pitch_err0) *cos(head_err0);Tbn(3,3)=cos(roll_err0)*cos(pitch_err0);Tnb=Tbn';%位置矩阵的初始化《捷联惯导系统》P46 其中游动方位角 a=0 假使初始经纬度确知Cne(1,1) = - sin(longitude0);Cne(1,2) = cos(longitude0);Cne(1,3) = 0;Cne(2,1) = - sin(latitude0) * cos(longitude0);Cne(2,2) = - sin(latitude0) * sin(longitude0);Cne(2,3) = cos(latitude0);Cne(3,1) = cos(latitude0) * cos(longitude0);Cne(3,2) = cos(latitude0) * sin(longitude0);Cne(3,3) = sin(latitude0);Cen=Cne';%初始四元数的确定《捷联惯导系统》 P151-152 方法本身保证了q1^2+q2^2+q3^2+q4^2=1q(2,1) = sqrt(abs(1.0 + Tnb(1,1) - Tnb(2,2) - Tnb(3,3))) / 2.0; q(3,1) = sqrt(abs(1.0 - Tnb(1,1) + Tnb(2,2) - Tnb(3,3))) / 2.0; q(4,1) = sqrt(abs(1.0 - Tnb(1,1) - Tnb(2,2) + Tnb(3,3))) / 2.0;q(1,1) = sqrt(abs(1.0 - q(2,1) ^2 - q(3,1) ^2 - q(4,1) ^2));% 判断q(1,1)的符号flag_q11=cos(head_err0/2.0)*cos(pitch_err0/2.0)*cos(roll_err0/2.0)-sin(head_err0/2.0)*sin(pitch_err0/2.0)*sin(roll_err0/2.0);if (flag_q11 >0) %此时q(1,1)取正if (Tnb(3,2) < Tnb(2,3))q(2,1) = - q(2,1);endif (Tnb(1,3) < Tnb(3,1))q(3,1) = - q(3,1);endif (Tnb(2,1) < Tnb(1,2))q(4,1) = - q(4,1);endelse %此时q(1,1)取负或0q(1,1) = - q(1,1);if (Tnb(3,2) > Tnb(2,3))q(2,1) = - q(2,1);endif (Tnb(1,3) > Tnb(3,1))q(3,1) = - q(3,1);endif (Tnb(2,1) > Tnb(1,2))q(4,1) = - q(4,1);endend%-------------------------迭代推算用到的参数的初始化------------------------Wiee_e = 0;Wiee_n = 0;Wiee_u = Omega_ie;Wiee = [Wiee_e Wiee_n Wiee_u]'; %地球速率在地球系中的投影东-北-天Lat_err(1)=latitude0;Lon_err(1)=longitude0;High_err(1)=High0;Ve_err(1)=Ve0;Vn_err(1)=Vn0;Vu_err(1)=Vu0;pitch_err(1)=pitch_err0;head_err(1)=head_err0;roll_err(1)=roll_err0;Re=6378137.0;%6378245.0; %地球长轴《惯性导航系统》 P28e=0.0033528106647474807198455286185206; %地球扁率精确值ee=0.00669437999014131699614;%----------------------------迭代推算开始-----------------------------------for i=1:NumofEachData%----------------------------惯性仪表数据的获得------------------------Wibb(1,1)=omigax(i); %指向右机翼方向为x正方向,指向机头方向为y正向,z轴与x轴和y轴构成右手坐标系Wibb(2,1)=omigay(i); %单位:弧度/妙Wibb(3,1)=omigaz(i); %右前上fb(1,1)=fb_x(i); %指向右机翼方向为x正方向,指向机头方向为y正向,z轴与x轴和y轴构成右手坐标系fb(2,1)=fb_y(i); %单位:米/秒2fb(3,1)=fb_z(i); %右前上%--------计算在姿态矩阵和位置矩阵更新时用到的参数------------------ RM=Re*(1.0-2.0*e+3.0*e*Cne(3,3)^2)+High_err(i); %《捷联惯导系统》P233 P235RN=Re*(1.0+e*Cne(3,3)^2)+High_err(i);% RN=Re*(1-ee)/(sqrt(1-ee*sin(Lat_err(i))))^3+High_err(i);% RM=Re/sqrt(1-ee*sin(Lat_err(i)))+High_err(i);%实验当地重力加速度计算《捷联惯导系统》P150 《惯性导航系统》 P35g=g0*((1.0+0.0052884*Cne(3,3)^2)-0.0000059*(1-(1-2*Cne(3,3)^2)^2))*(1 .0-2.0*High_err(i)/Re);tmp_slat=sin(Lat_err(i))*sin(Lat_err(i));Wien = Cne * Wiee; %地球速率在导航系中的投影Wenn(1,1) = -Vn_err(i)/RM;Wenn(2,1) = Ve_err(i)/RN; % <<惯性导航系统>> P45 考虑了地球转动的影响.Wenn(3,1) = Ve_err(i)*tan(Lat_err(i))/RN; %计算Wenn(不太精确),更新速度和位置矩阵时用Winn=Wien+Wenn;Winb=Tbn*Winn;Wnbb=Wibb-Winb; %姿态速率在姿态更新时用到fn=Tnb*fb; % x-y-z 东-北-天% 速度的更新《捷联惯导系统》 P30 33 东-北-天difVe_err=fn(1,1)+(2*Wien(3,1)+Wenn(3,1))*Vn_err(i)-(2*Wien(2,1)+Wenn (2,1))*Vu_err(i);difVn_err=fn(2,1)-(2*Wien(3,1)+Wenn(3,1))*Ve_err(i)+(2*Wien(1,1)+Wenn (1,1))*Vu_err(i);difVu_err=fn(3,1)+(2*Wien(2,1)+Wenn(2,1))*Ve_err(i)-(2*Wien(1,1)+Wenn (1,1))*Vn_err(i)-g;Ve_err(i+1)=Ve_err(i)+difVe_err*TimeEach;Vn_err(i+1)=Vn_err(i)+difVn_err*TimeEach;Vu_err(i+1)=Vu_err(i)+difVu_err*TimeEach;High_err(i+1)=High_err(i)+Vu_err(i)*TimeEach;% 位置矩阵的实时更新《惯性导航系统》 P190Cne(1,1)=Cne(1,1)+TimeEach*(Wenn(3,1)*Cne(2,1)-Wenn(2,1)*Cne(3,1)); Cne(1,2)=Cne(1,2)+TimeEach*(Wenn(3,1)*Cne(2,2)-Wenn(2,1)*Cne(3,2)); Cne(1,3)=Cne(1,3)+TimeEach*(Wenn(3,1)*Cne(2,3)-Wenn(2,1)*Cne(3,3)); Cne(2,1)=Cne(2,1)+TimeEach*(-Wenn(3,1)*Cne(1,1)+Wenn(1,1)*Cne(3,1)); Cne(2,2)=Cne(2,2)+TimeEach*(-Wenn(3,1)*Cne(1,2)+Wenn(1,1)*Cne(3,2)); Cne(2,3)=Cne(2,3)+TimeEach*(-Wenn(3,1)*Cne(1,3)+Wenn(1,1)*Cne(3,3)); Cne(3,1)=Cne(3,1)+TimeEach*(Wenn(2,1)*Cne(1,1)-Wenn(1,1)*Cne(2,1)); Cne(3,2)=Cne(3,2)+TimeEach*(Wenn(2,1)*Cne(1,2)-Wenn(1,1)*Cne(2,2)); Cne(3,3)=Cne(3,3)+TimeEach*(Wenn(2,1)*Cne(1,3)-Wenn(1,1)*Cne(2,3));% Mat_Wenn(1,1)=0;% Mat_Wenn(1,2)=Wenn(3,1);% Mat_Wenn(1,3)=-Wenn(2,1); %Wenn的反对阵矩阵取负% Mat_Wenn(2,1)=-Wenn(3,1); %这里位置矩阵的及时修正为:dCne/dt=Mat_Wenn*Cne% Mat_Wenn(2,2)=0;% Mat_Wenn(2,3)=Wenn(1,1);% Mat_Wenn(3,1)=Wenn(2,1);% Mat_Wenn(3,2)=-Wenn(1,1);% Mat_Wenn(3,3)=0;%% Mat_Wenn=Mat_Wenn*Cne*TimeEach;% Cne=Cne+Mat_Wenn;Cen=Cne';% 计算经纬度Lat_err(i+1)=asin(Cne(3,3));Lon_err(i+1)=atan(Cne(3,2)/Cne(3,1)); %这是经度的主值if (Cne(3,1) < 0)if (Lon_err(i+1) > 0)Lon_err(i+1) = Lon_err(i+1) - pi;elseLon_err(i+1) = Lon_err(i+1) + pi;endend% 四元数的及时修正《惯性导航系统》 P194% Mat_Wnbb=[ 0, -Wnbb(1,1), -Wnbb(2,1), -Wnbb(3,1); % Wnbb(1,1), 0, Wnbb(3,1), -Wnbb(2,1); % Wnbb(2,1), -Wnbb(3,1), 0, Wnbb(1,1); % Wnbb(3,1), Wnbb(2,1), -Wnbb(1,1), 0];% q=q+Mat_Wnbb*q*TimeEach/2.0;q(1,1)=q(1,1)+TimeEach*(-Wnbb(1,1)*q(2,1)-Wnbb(2,1)*q(3,1)-Wnbb(3,1)* q(4,1))/2.0;q(2,1)=q(2,1)+TimeEach*(Wnbb(1,1)*q(1,1)+Wnbb(3,1)*q(3,1)-Wnbb(2,1)*q (4,1))/2.0;q(3,1)=q(3,1)+TimeEach*(Wnbb(2,1)*q(1,1)-Wnbb(3,1)*q(2,1)+Wnbb(1,1)*q (4,1))/2.0;q(4,1)=q(4,1)+TimeEach*(Wnbb(3,1)*q(1,1)+Wnbb(2,1)*q(2,1)-Wnbb(1,1)*q (3,1))/2.0;% 四元数归一化处理q_norm=sqrt(sum(q.*q));q=q/q_norm;% 计算姿态矩阵 TnbTnb(1,1) = q(1,1) ^2 + q(2,1) ^2 - q(3,1)^2 - q(4,1)^2;Tnb(1,2) = 2.0 * (q(2,1) * q(3,1) - q(1,1) * q(4,1));Tnb(1,3) = 2.0 * (q(2,1) * q(4,1) + q(1,1) * q(3,1));Tnb(2,1) = 2.0 * (q(2,1) * q(3,1) + q(1,1) * q(4,1));Tnb(2,2) = q(1,1)^2 - q(2,1)^2 + q(3,1)^2 - q(4,1)^2;Tnb(2,3) = 2.0 * (q(3,1) * q(4,1) - q(1,1) * q(2,1));Tnb(3,1) = 2.0 * (q(2,1) * q(4,1) - q(1,1) * q(3,1));Tnb(3,2) = 2.0 * (q(3,1) * q(4,1) + q(1,1) * q(2,1));Tnb(3,3) = q(1,1)^2 - q(2,1)^2 - q(3,1)^2 + q(4,1)^2;Tbn=Tnb';flag_pitch=asin(Tnb(3,2));flag_roll=atan(-Tnb(3,1)/Tnb(3,3));flag_head=atan(-Tnb(1,2)/Tnb(2,2));if(Tnb(3,3)<0)if(flag_roll<0)flag_roll=flag_roll+pi;endif(flag_roll>0)flag_roll=flag_roll-pi;endend% 偏航角范围 -180度——180度北偏西为正if(Tnb(2,2)<0)if(flag_head<0)flag_head=flag_head+pi;endif(flag_head>0)flag_head=flag_head-pi;endend% 姿态角更新pitch_err(i+1)=flag_pitch;head_err(i+1)=flag_head;roll_err(i+1)=flag_roll;% 解算完毕由对准结果、陀螺、加表的输出解算出载体的位置、速度、姿态%----------------------计算解算误差------------------ddLat(i)=(Lat_err(i)-latitude(i))*rad_deg; %纬度误差单位:度ddLog(i)=(Lon_err(i)-longitude(i))*rad_deg; %经度误差单位:度ddHigh(i)=High_err(i)-High(i); %高度误差单位:米ddVe(i)=Ve_err(i)-Ve(i);ddVn(i)=Vn_err(i)-Vn(i); % 速度误差单位:米/妙2ddVu(i)=Vu_err(i)-Vu(i);ddpitch(i)=(pitch_err(i)-pitch(i))*rad_deg*3600; %姿态误差单位:度ddhead(i)=(head_err(i)-head(i))*rad_deg*3600;ddroll(i)=(roll_err(i)-roll(i))*rad_deg*3600;endfclose(fid_read);%---------------------------绘图开始--------------------------------- figure(1)plot(Time,ddLog)ylabel('经度误差(度)'),xlabel('时间(秒)');figure(2)plot(Time,ddLat)ylabel('纬度误差(度)'),xlabel('时间(秒)');figure(3)plot(Time,ddHigh);ylabel('高度误差(米)'),xlabel('时间(秒)');figure(4)plot(Time,ddhead)ylabel('偏航角误差(角妙)'),xlabel('时间(秒)'); figure(5)plot(Time,ddpitch)ylabel('俯仰角误差(角妙)'),xlabel('时间(秒'); figure(6)plot(Time,ddroll);ylabel('滚转角误差(角妙)'),xlabel('时间(秒)'); figure(7)plot(Time,ddVe);ylabel('东向速度误差(米/秒)'),xlabel('时间(秒)'); figure(8)plot(Time,ddVn)ylabel('北向速度误差(米/秒)'),xlabel('时间(秒)'); figure(9)plot(Time,ddVu)ylabel('天向速度误差(米/秒)'),xlabel('时间(秒)');%------------------------------绘图结束-------------------------------。
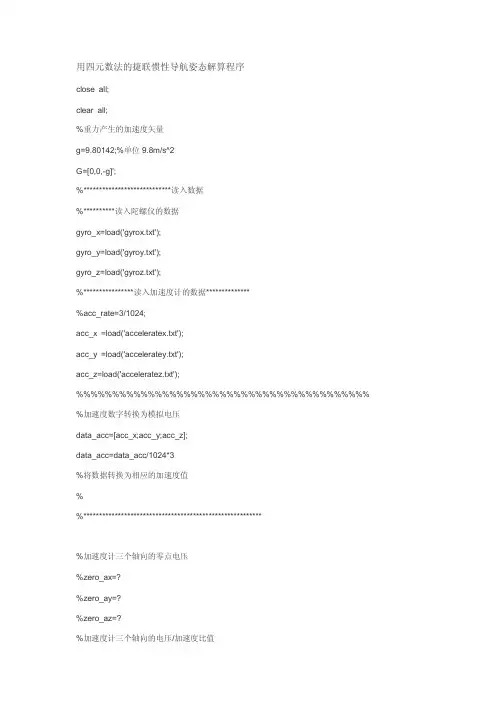

用四元数法的捷联惯性导航姿态解算程序close all;clear all;%重力产生的加速度矢量g=9.80142;%单位9.8m/s^2G=[0,0,-g]';%****************************读入数据%**********读入陀螺仪的数据gyro_x=load('gyrox.txt');gyro_y=load('gyroy.txt');gyro_z=load('gyroz.txt');%****************读入加速度计的数据**************%acc_rate=3/1024;acc_x =load('acceleratex.txt');acc_y =load('acceleratey.txt');acc_z=load('acceleratez.txt'); %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %加速度数字转换为模拟电压data_acc=[acc_x;acc_y;acc_z];data_acc=data_acc/1024*3%将数据转换为相应的加速度值%%*********************************************************%加速度计三个轴向的零点电压%zero_ax=?%zero_ay=?%zero_az=?%加速度计三个轴向的电压/加速度比值%rate_ax=? %单位是m/s^2/V%rate_ay=?%rate_az=?%acc_x=acc_x*acc_rate;%acc_y=acc_y*acc_rate;%acc_z=acc_z*acc_rate;aver_acc_x=mean(acc_x)aver_acc_y=mean(acc_y)aver_acc_z=mean(acc_z)%采样时间dtime=0.01;tm=0:dtime:0.01* (size(gyro_x,2)-1);%个数numn_point=size(gyro_x,2);%图1figureplot(tm,data_acc(1,:),'-',tm,data_acc(2,:),'.',tm,data_acc(3,:),'-.'); title('加速度计的采样曲线');legend('x_ACC','Y_ACC','Z_ACC');xlabel('Time / (10ms)');ylabel('Accelerate/ (m/s'')');grid on;%plot(tm,acc_x,'-',tm,acc_y,'.',tm,acc_z,'-.');%title('加速度的计的采样曲线'):%对采样曲线进行低通滤波a=[1,2,4,2,1];%gyro_x=filter(a/sum(a),1,gyro_x);%gyro_y=filter(a/sum(a),1,gyro_y);%gyro_z=filter(a/sum(a),1,gyro_z);%比例变换gyro_x=gyro_x/1024*3/0.6;gyro_y=gyro_y/1024*3/0.6;gyro_z=gyro_z/1024*3/0.6;%零点电压--陀螺仪,取前80个数的平均电压zero_gx=sum(gyro_x(1:80))/80zero_gy=sum(gyro_y(1:80))/80zero_gz=sum(gyro_z(1:80))/80%减去零点gyro_x=(gyro_x-zero_gx)/0.0125/180*pi; gyro_y=(gyro_y-zero_gy)/0.0125/180*pi; gyro_z=(gyro_z-zero_gz)/0.0125/180*pi;%gyro_x=(gyro_x-2.5)/0.0125/180*pi;%gyro_y=(gyro_y-2.5)/0.0125/180*pi;%gyro_z=(gyro_z-2.5)/0.0125/180*pi;%测试数据accelerate=zeros(3,n_point);accelerate(1,1:100)=10;accelerate(1,101:200)=-10;accelerate(1,201:300)=0;%陀螺仪数据gyro_x=zeros(1,n_point);gyro_y=zeros(1,n_point);gyro_z=zeros(1,n_point);gyro_z(1:100)=pi/3;gyro_z(101:200)=-pi/3;%重力轴始终有加速度accelerate(3,:)=accelerate(3,:)+9.8;figureplot(tm,accelerate(1,:),'-',tm,accelerate(2,:),'.',tm,accelerate(3,:),'-.');title('加速度计的采样曲线');legend('x_ACC','Y_ACC','Z_ACC');xlabel('Time / (10ms)');ylabel('Accelerate/ (m/s'')');grid on;%画出陀螺仪的采样曲线figureplot(tm,gyro_x,'r-',tm,gyro_y,'g.',tm,gyro_z,'b-.');title('陀螺仪的采样曲线');legend('x_Gyro','Y_Gyro','Z_Gyro');xlabel('Time / (10ms)');ylabel('Angel_rate/ (degree/s)');grid on;%size(gyro_x)%size(gyro_y)%size(gyro_z)data_gyro=[gyro_x;gyro_y;gyro_z];%转移矩阵--即方向余弦矩阵T=eye(3); %T是3*3的单位矩阵,初始转移矩阵%四元数矩阵,存储每步更新之后的四元数,方便以后绘图Q=zeros(4,n_point);%四元数的初始值确定,假定一开始导航坐标系与载体坐标系是重合的,因此方向余弦矩阵,是单位矩阵,利用它们之间的关系确定四元数的初始值。
1、方向余弦表cos cos sin sin sin sin cos cos sin sin cos sin sin cos cos cos sin cos sin sin sin cos sin sin cos sin cos cos cos C ψϕψθϕψϕψθϕθϕψθψθθψϕψθϕψϕψθϕθϕ-+-⎡⎤⎢⎥=-⎢⎥⎢⎥+-⎣⎦(1.0.1)X E Y C N Z ζ⎡⎤⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦(1.0.2) 在列写惯导方程需要采用方向余弦表,因为错误!未找到引用源。
α较小,经常采用两个假设,即:cos 1sin 1αα≈≈ (1.0.3)式中 α-两坐标系间每次相对转动的角度。
由于在工程实践中可以使其保持很小,所以进一步可以忽略如下形式二阶小量,即:sin sin 0αβ≈ (1.0.4)式中β-两坐标系间每次相对转动的角度。
可以将C 近似写为:111C ψϕψθϕθ-⎡⎤⎢⎥=-⎢⎥⎢⎥-⎣⎦(1.0.5) 2、用四元素表示坐标变换对于四元素123q p i p j p k λ=+++,可以表示为如下形式cossincos sincos sincos 2222q i j k θθθθαβγ=+++ (2.0.1)式(2.0.1)的四元数称为特殊四元数,它的范数1q =。
1'R q Rq -= (2.0.2)式中''''R xi yj zk R x i y j z k=++=++ (2.0.3)将q 和1q -的表达式及式(2.0.3)带入(2.0.2),然后用矩阵表示为:()()()()()()()()()22221231231322222123213231222213223131222''22'22p p p p p p p p p x x y p p pp p p p p p yz z p p p p p p p p p λλλλλλλλλ⎡⎤+--+-⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=-+--+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎢⎥+-+--⎣⎦(2.0.4)由四元素到方向余弦表的建立123cos cos22sin cos22sin sin22cos sin22p p p θψϕλθψϕθψϕθψϕ-=-=-=+= (2.0.5) 将式(2.0.5)带入式(2.0.4),有cos cos sin cos sin cos sin sin cos cos sin sin sin cos cos cos sin sin sin cos cos cos cos sin sin sin sin cos cos C ϕψϕθψϕψϕθψϕθϕψϕθψϕψϕθψϕθθψθψθ-+⎡⎤⎢⎥=---+⎢⎥⎢⎥-⎣⎦(2.0.6)3、四元数转动公式的进一步说明采用方向余弦矩阵描述飞行器姿态运动时,需要积分姿态矩阵微分方程式,即C C =Ω (3.0.1)式中 C -动坐标系相对参考坐标系的方向余弦阵Ω-动坐标系相对参考坐标系角速度ω的反对称矩阵表达式 其中C 为公式(1.0.5)提供000z y zx y xωωωωωω⎡⎤-⎢⎥Ω=-⎢⎥⎢⎥-⎣⎦(3.0.2)采用(3.0.1)计算需要列写9个一阶微分方程式,计算量大。