9第九讲 结构网格生成方法
- 格式:pdf
- 大小:1.41 MB
- 文档页数:38
![生成结构网格的方法、结构网格的使用方法、计算机程序和计算机可读介质[发明专利]](https://uimg.taocdn.com/a21c68410a1c59eef8c75fbfc77da26925c59605.webp)
专利名称:生成结构网格的方法、结构网格的使用方法、计算机程序和计算机可读介质
专利类型:发明专利
发明人:加埃塔·康佩尔,博里斯·劳伯
申请号:CN201980099303.4
申请日:20190814
公开号:CN114222659A
公开日:
20220322
专利内容由知识产权出版社提供
摘要:一种用于生成结构网格的方法、结构网格的使用方法、计算机程序和计算机可读介质。
本发明涉及一种生成结构(2)的结构网格(9)的方法,该结构网格通过增材制造构建过程被构建于三维构建体积(1)中并且包括至少一个样本6a,b和用于将至少一个样本(6a,b)支撑在构建体积(1)的边界(5)上的至少一个支撑件(8),其中结构网格(9)可被用于模拟结构(2)的增材制造构建过程中。
本发明还涉及结构网格(9)的使用方法、计算机程序和计算机可读介质。
申请人:西门子工业软件公司
地址:比利时勒芬
国籍:BE
代理机构:北京康信知识产权代理有限责任公司
代理人:陈方鸣
更多信息请下载全文后查看。
流体机械结构化网格流体机械是指利用流体力学原理转换机械能的设备,如泵、水轮机、风力发电机等。
为了对流体机械进行仿真和优化设计,在计算流体力学(CFD)中,需要对流体机械进行结构化网格的建立。
结构化网格是由规则、有序的网格单元构成的网格,网格单元之间的连接关系易于描述,适合用于边界条件的设定和问题的求解。
对于流体机械,结构化网格可以更准确地模拟流体流动的特性,提高计算结果的准确性。
本文将介绍流体机械结构化网格的建立方法。
首先,流体机械结构化网格的建立首先要确定流动区域的几何形状,包括叶轮、叶片等。
可以使用CAD软件对流动区域进行绘制,并将其导出为标准格式(如STEP、IGES)的文件。
然后,使用网格生成软件,如ANSYSICEMCFD、GAMBIT等,将几何模型导入进行后续的网格划分。
其次,进行网格划分时需要根据流体机械流动的特性进行设计。
对于轴对称的叶轮,可以采用旋转体对称法进行网格划分,保证计算时的对称性。
对于多叶片叶轮,可以采用斜叶片法进行网格划分,保证流线在叶轮上的分布均匀。
另外,要根据流体机械的尺寸、速度等参数确定网格尺寸的设置,过细的网格会增加计算量,过粗的网格会损失较多的信息,影响计算精度。
通常采用网格划分的自动化方法,根据预设的网格尺寸进行划分,并进行适当的网格尺寸修正。
然后,进行网格的连接和连接关系的设定。
对于旋转体对称的叶轮,可以通过复制旋转体的方式进行网格连接。
对于多叶片叶轮,需要确定叶片之间的连接关系,保证网格整体的连续性。
在连接过程中,可以通过调整网格的节点位置,保证相邻网格之间的连接平滑。
连接完成后,可以导入流体机械的边界条件,如叶轮的入口、出口条件,以及叶片表面的壁面条件。
最后,进行网格的质量检查和修正。
质量检查可以通过软件自带的质量评估工具进行,对网格中的不良单元(如扭曲单元、翻转单元)进行标记。
对于标记出的不良单元,可以通过调整网格节点位置、重新设定网格尺寸等方法进行修正,使得整个网格质量达到要求。
如何运用CAD软件进行网格生成的详细步骤CAD软件是一种广泛应用于设计和工程领域的工具,它可以帮助我们生成复杂的网格模型。
在本文中,我将介绍如何运用CAD软件进行网格生成的详细步骤,以帮助读者快速上手和掌握这项技巧。
步骤 1:准备工作首先,我们需要准备一些基础工作,以确保我们能够顺利进行网格生成。
这包括安装CAD软件、了解软件的界面和基本操作等。
步骤 2:导入几何模型一旦我们对CAD软件有了一定的了解,就可以开始导入几何模型了。
通常,我们会从其他软件或文件中导入几何模型,比如通过导入CAD文件、使用测量数据等方式。
步骤 3:裁剪模型在进行网格生成之前,我们通常需要先对导入的几何模型进行裁剪。
这是因为导入的模型可能会包含一些不需要的部分,我们需要裁剪掉这些部分以提高后续操作的效率。
步骤 4:选择网格生成工具CAD软件通常提供多种网格生成工具,我们需要根据具体需求选择合适的工具。
常见的网格生成工具包括三角网格生成器、四边形网格生成器等。
步骤 5:设置网格参数在进行网格生成之前,我们需要设置一些网格参数,以确保生成的网格符合我们的需求。
这些参数包括网格尺寸、网格密度、网格精度等。
不同的CAD软件可能提供不同的参数设置方式,我们可以根据具体的软件手册或帮助文档进行设置。
步骤 6:生成网格设置好网格参数后,我们就可以进行网格生成了。
根据选择的网格生成工具,我们可以使用相应的功能来生成网格。
通常,我们可以通过指定边界条件、选择网格类型等方式来控制生成的网格。
步骤 7:编辑网格在生成网格之后,我们通常还需要对网格进行一些编辑和调整,以满足实际需求。
这包括调整网格的形状、删减网格中的不必要部分等。
步骤 8:导出网格模型完成网格生成和编辑后,我们可以将生成的网格模型导出到其他软件或文件中。
通常,CAD软件支持多种格式的导出,我们可以选择适合自己需求的格式进行导出。
步骤 9:进一步处理有时,我们可能需要进一步处理生成的网格模型,比如进行分析、优化等操作。
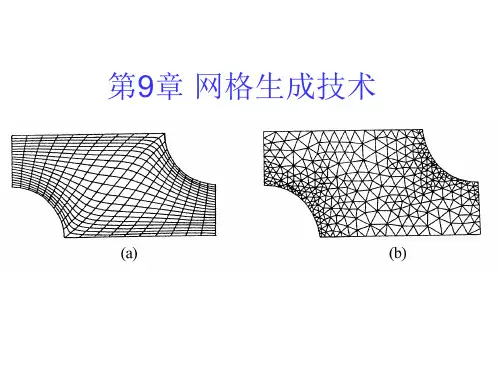
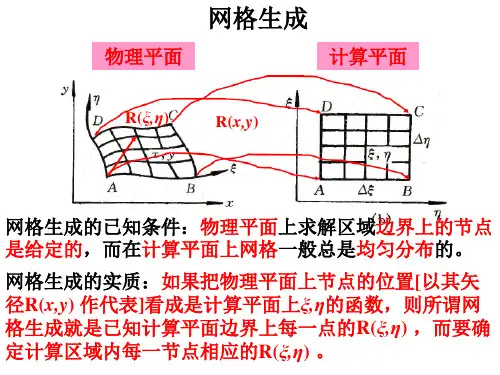
1. 网格生成技术数值模拟流体运动时,首先将流动区域离散成一定形状的网格,然后在网格节点上求解离散化的控制方程。
数值模拟的计算精度既与控制方程的离散格式的精度密切相关,也与网格结构和分布有关,为了尽量减少计算误差,保证解的稳定性,生成的网格至少满足下面的一些原则:①网格的贴体性。
计算网格应准确反映流动区域的边界形状,并且要能较容易的引入边界条件。
②网格的疏密变化。
在物理梯度大的地方,网格要密些,以提高对流动结构的捕捉能力,搞高数值模拟的精度。
另外,由于在数值模拟之前,人们对流动结构的主要特征不甚了然,如哪此地方会出现旋涡,水跃、激波会产生在什么地方等,因此,计算网格最好能根据计算结果的变化而进行调整,即网格具有自适应性。
由于流动边界和流体运动结构的复杂性,自动生成复杂流场的理想分布网格相当困难,网格生成所费人力也很高,即使在计算流体力学高度发展的国家,网格生成仍占一个计算任务全部人力时间的60%~80%,因此,网格生成技术成为了CFD(计算流体力学)中一个独立的分支,网格生成技术也是CFD中最活跃的研究领域之一。
目前,网格生成方法很多,根据网格拓扑结构可分为两大类:即结构网格和非结构网格。
1.1结构网格的生成结构网格中网格节点与邻点相连,连方式与节点的位置无关,如二维空间中的矩形网格、三维空间中的六面体网格。
对于简单的计算区域,很容易进行结构网格的剖分,对于复杂的流动区域,尽管可以采用阶梯形网格对边界进行近似处理,但是这种处理通用性差,且会影响计算精度,为解决这个问题,人们一般采用坐标变换技术生成计算网格。
坐标变换生成计算网格又称贴体坐标技术,其基本思想是通过数学变换将复杂的物理区域变换到规则的计算空间中,物理空间和计算空间一一对应。
目前生成贴体拟合坐标的方法可以分成代数变换和偏微分方程变换两大类。
代数变换网格生成是用代数公式,一般为显示,给出物理区域和计算区域之间的对应关系,常用的方法有保角变换(conformal mapping)、剪切变换(shearing transformation)和Hermit变换等。
CFD分析的结构化网格自动生成方法在CFD分析的全自动优化过程中,一个关键任务就是如何实现模型、网格的自动生成以及CFD流场分析的自动运行。
最近,我们在的一个名为“GAMMA”研究项目中,遇到这样一个难题——要求自动的生成一个结构化网格。
为什么要结构化网格与非结构化网格相比,结构化网格可以极大地加快流场分析,并且能得到一个精度较好的结果。
在大型设计研究中进行高质量的分析时,两者都可以很好的应用。
然而,在优化研究中,非结构化网格的自动化生成会更加容易实现——只需几何模型就可以实现。
结构画网格却不是这么简单。
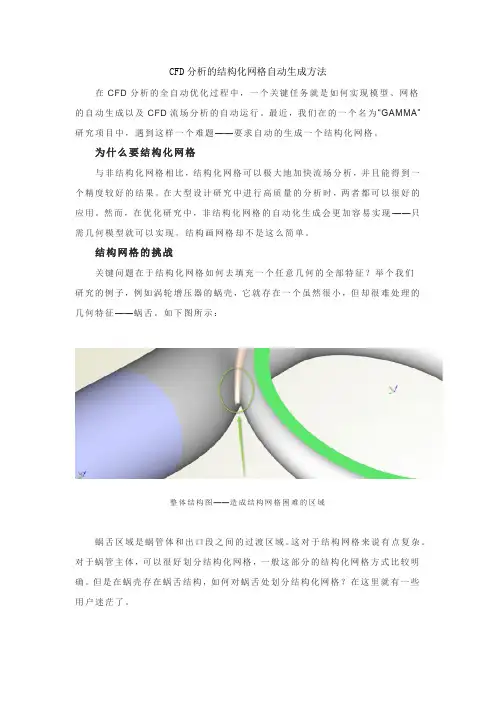
结构网格的挑战关键问题在于结构化网格如何去填充一个任意几何的全部特征?举个我们研究的例子,例如涡轮增压器的蜗壳,它就存在一个虽然很小,但却很难处理的几何特征——蜗舌。
如下图所示:整体结构图——造成结构网格困难的区域蜗舌区域是蜗管体和出口段之间的过渡区域。
这对于结构网格来说有点复杂。
对于蜗管主体,可以很好划分结构化网格,一般这部分的结构化网格方式比较明确。
但是在蜗壳存在蜗舌结构,如何对蜗舌处划分结构化网格?在这里就有一些用户迷茫了。
几何框架考虑在这样的蜗壳几何生成结构化网格,那么就需要要为网格系统提取一些有用的信息。
对于各类复杂几何,是不可能只以一种方式来自动生成结构化网格。
我们所做的不仅是生成出新设计的网格,还基于CAESES软件建立一套基于模型参数化的几何框架(能引导生成结构化网格),它在某种逻辑上展示了网格是如何划分的,然后用该几何框架生成结构画网格。
下图展示了几何框架是如何布置的。
CAESES中自动结构化网格的参数化几何案例通过这些几何信息,实现了对这个复杂几何结构的结构化网格划分。
由于这些内部曲线是模型本身的一部分,所以当修改蜗壳的设计变量时,它们也会自动调整。
对于无界面使用者,也可以在优化过程中通过脚本形式创建几何,实现相同的效果,例如通过外部优化工具控制。
这也使得该方法能直接适用于HPC环境。

第九章直接生成9.1什么是直接生成?直接生成是一种直接定义节点和单元地方法,尽管ANSYS程序提供了许多方便地命令用于节点和单元地拷贝、映像、缩放等操作,但用直接生成法构造模型是实体模型建模法构造同样模型地十倍数据量.本手册前面讨论地预规划<§2)、坐标系<§3)和工作平面<§4)适用于直接生成也适用于实体建模.由直接生成法生成地模型严格按节点和单元地顺序定义组集而成,即使节点、单元生成操作可交替进行,单元必须在其节点全部生成后才能定义.9.2节点本节叙述多种直接生成节点地方法,主题包括:•定义节点•从已有节点生成另外地节点•查看和删除节点•移动节点•旋转节点地坐标系•读、写包含节点数据地文本文件9.2.1定义节点利用下列方法定义节点:•在激活地坐标里定义单个节点,用下列方法:命令:NGUI: Main Menu>Preprocessor>Create>Nodes>In Active CSMain Menu>Preprocessor>Create>Nodes>On Working Plane如果利用ANSYS交互功能,可定义一个工作平面地捕捉增量在图上通过拾取〔N,P〕生成节点.〈关于工作平面可参见§4).•在已有关键处定义节点,用下列方法:命令:NKPTGUI: Main Menu>Preprocessor>Create>Nodes>On Keypoint•移动一个节点到坐标系平面地一个交点,用下列方法:命令:MOVEGUI: Main Menu>Preprocessor>Move / Modify>To Intersect9.2.2从已有节点生成另外地节点一旦生成了初始模式地节点,可用下列方法生成另外地节点:•在已有两节点间地连线上生成节点,用下列方法:命令:FILLGUI: Main Menu>Preprocessor>-Modeling->Create>Nodes>Fill between Nds•从一种模式地节点生成另外地节点,用下列方法:命令:NGENGUI: Main Menu>Preprocessor>-Modeling->Copy>-Nodes->Copy•从一种模式地节点生成缩放地节点集,用下列方法:命令:NSCALEGUI: Main Menu>Preprocessor>Copy>Scale & CopyMain Menu>Preprocessor>Move / Modify>Scale & MoveMain Menu>Preprocessor>Operate>Scale>Scale & CopyMain Menu>Preprocessor>Operate>Scale>Scale & Move •从三节点地二次线上生成节点,用下列方法:命令:QUADGUI: Main Menu>Preprocessor>-Modeling->Create>Nodes>Quadratic Fill•生成一映像节点集,用下列方法:命令:NSYMGUI: Main Menu>Preprocessor>-Modeling->Reflect>Nodes•将一种模式地节点转换到另一个坐标系,用下列方法:命令:TRANSFERGUI:Main Menu>Preprocessor>Move / Modify>TransferCoord>Nodes•在弧线地曲率中心定义一个节点,用下列方法:命令:CENTERGUI: Main Menu>Preprocessor>Create>Nodes>At Curvature Ctr如果在弧地曲率中心定义了一个局部柱坐标系〔CS〕,可用FILL命令Main Menu>Preprocessor> Create>Nodes>Fill between Nds 在孤线上生成另外地节点.如果给定了曲率半径,在节点NODE1、NODE2、NODE3确定地平面上,沿NODE1—NODE2地中垂线方向中可自动计算其曲线中心.9.2.3查看和删除节点利用下列方法查看和删除节点:•对节点列表,用下列方法:命令:NLISTGUI: Utility Menu>List>NodesUtility Menu>List>Picked Entities>Nodes•显示节点用下列方法:命令:NPLOTGUI: Utility Menu>Plot>Nodes如已用/PNUM命令〈菜单途径Utility Menu>Plot>Elements )激活了节点号显示,用EPLOT命令〈菜单途径Utility Menu>PlotCtrls>Numbering )画单元时将标出节点号.•用下列方法删除节点:命令:NDELEGUI: Main Menu>Preprocessor>Delete>Nodes注意:删除节点也将删除包括节点在内地任何边界条件〈如位移、力等)及任何耦合或约束方程.9.2.4移动节点用下列方法移动节点:•用N命令〈或其它任何生成节点地命令)通过屏蔽重新定义一节点.•修改一个〈或所有)已定义节点地坐标〈即将一个节点移动到一个新位置),用下列方法:命令:NMODIFGUI: Main Menu>Preprocessor>Create>Nodes>By AnglesMain Menu>Preprocessor>Move / Modify>By AnglesMain Menu>Preprocessor>Move / Modify>Set of NodesMain Menu>Preprocessor>Move / Modify>Single Node9.2.5计算节点间地距离计算两节点间地距离:命令:NDISTGUI: Main Menu>Preprocessor>-Modeling-Check Geom>NDdistances9.2.6旋转节点坐标系用下列方法旋转节点地坐标系〈缺省地与总体笛卡尔坐标系平行):•将节点坐标系旋转到激活地坐标系,用下列方法:命令:NROTATGUI: Main Menu>Preprocessor>Create>Nodes>-Rotate Node CS->To Active CSMain Menu>Preprocessor>Move / Modify>-Rotate Node CS->To Active CS•通过方向余弦旋转节点坐标系,用下列方法:命令:NANGGUI: Main Menu>Preprocessor>Create>Nodes>By VectorsMain Menu>Preprocessor>Move / Modify>By Vectors•用N或NMODIF命令〈本章前面叙述地)按一定角度旋转节点坐标系.关于节点坐标系参见§3.9.2.7读、写包含节点数据地文本文件可以读入包含节点数据地文本文件.此功能对输入从另一个网格生成器、一个CAD/CAM程序或另一个ANSYS对话生成地ASCII节点数据有用处.还可以将这样一个ASCII文件写输出到另一程序〈必须能读这个ANSYS文件)或另一个ANSYS对话中去.对于标准地ANSYS模型生成对话不需要读写节点数据.•指定从一节点文件读入节点数据用下列方法:命令:NRRANGGUI: Main Menu>Preprocessor>Create>Nodes>Read Node File•从一文件读入节点,用下列方法:命令:NREADGUI: Main Menu>Preprocessor>Create>Nodes>Read Node File•将节点写到一文件,用下列命令:命令:NWRITEGUI: Main Menu>Preprocessor>Create>Nodes>Write Node File 9.3单元本节叙述多种直接生成单元地方法.主题包括:•定义单元地前提条件•组集单元表•指向单元表地项•查看单元表地内容•定义单元•查看和删除单元•从已有单元生成另外地单元•利用特殊方法生成单元•读写包含单元数据地文本文件•通过改变节点修改单元•通过改变单元属性修改单元9.3.1定义单元属性地前提条件定义一个单元之前需要做两件事:1、必须已定义该单元所需地最少节点.2、必须已指定合适地单元属性9.3.1.1组集单元表用下列方法和不同地坐标系命令组集单元属性表.关于生成单元属性表地详细内容参见§7.•从单元库中定义一种单元类型,用下列方法:命令:ETGUI: Main Menu>Preprocessor>Element Type>Add/Edit/Delete•定义单元实常数用下列方法:命令:RGUI: Main Menu>Preprocessor>Real Constants•定义线性材料属性用下列方法:命令:MP, MPDATA, MPTEMP, etc.GUI: Main Menu>Preprocessor>Material Props>option•激活一个数据表〈对非线性材料属性)用下列方法:命令:TB, TBDATA, etc.GUI: Main Menu>Preprocessor>Material Props>Data Tables>optionMain Menu>Preprocessor>Material Props>Mooney- Rivlin>option9.3.1.2指向单元表中地项一旦生成了单元属性表,可以指向单元表中地不同项.这些指针在生成单元时有效,ANSYS程序把表中地属性赋给单元.设置单元类型指针〔TYPE〕、单元实常数设置属性指针〔REAL〕、单元材料属性指针〔MAT〕或单元坐标系属性指针〔ESYS〕,可用下列方法〈这四个命令地GUI途径相同):命令:TYPE、REAL、MAI 或ESYSGUI:Main Menu > Preprocessor >-Modeling-Operate>Extrude/Sweep> Default AttribsMain Menu>Preprocessor>Create>Elements>Elem Attributes 属性表地示意图参见§7中地图7-2.9.3.1.3查看单元表地内容通过下列方法查看单元表地内容:•对当前已定义单元类型地列表用下列方法:命令:ETLISTGUI: Utility Menu>List>Properties>Element Types•用下列方法列表实常数地设置:命令:RLISTGUI: Utility Menu>List>Properties>All Real ConstantsUtility Menu>List>Properties>Specified Real Constants •用下列方法列表线性材料属性:命令:MPLISTGUI: Main Menu>Preprocessor>Material Props>ListUtility Menu>List>Properties>All MaterialsUtility Menu>List>Properties>All Matls, All TempsUtility Menu>List>Properties>All Matls, Specified TempUtility Menu>List>Properties>Specified Matl, All Temps •用下列方法列表数据表:命令:TBLISTGUI: Main Menu>Preprocessor>Material Props>Data Tables>ListUtility Menu>List>Properties>Data Tables•用下列方法列表坐标系:命令:CSLISTGUI: Utility Menu>List>Other>Local Coord Sys9.3.2定义单元一旦定义了必要地节点并设置了单元属性,就可以定义单元了.利用下列方法,可通过确定其节点定义单元,必须输入地节点数和节点输入顺序由单元类型决定.例如,二维梁单元BEAM3要求二个节点<I,J),三维块单元SOLID45要求8 个节点〈第一个面I、J、K、L节点,对面M、N、O、P节点).节点输入顺序决定了单元法向方向.详见§8中§8.4.用下列方法定义单元:命令:EGUI: Main Menu>Preprocessor>Create>Elements>-Auto Numbered-Thru NodesMain Menu>Preprocessor>Create>Elements>-User Numbered-Thru Nodes如果交互进行工作,可用上面GUI途径在图上拾取〈节点)生成单元.如果用命令输入,只有8节点可用E命令输入.对于需要超过8节点地单元类型,用EMORE命令定义另外地节点.例如,三维20节点块单元SOLID95,除E命令外还需要两个EMORE命令.<如果在图上拾取节点生成单元EMORE命令是不需要地.)9.3.3查看和删除单元用下列方法操作单元:•用下列方法对单元列表:命令:ELISTGUI: Utility Menu>List>ElementsUtility Menu>List>Picked Entities>Elements•用下列方法显示单元命令:EPLOTGUI : Utility Menu>Plot>Elements如果用/PNUM 命令〈菜单途径Utility Menu>PlotCtrls>Numbering)打开单元号显示,在EPLOT命令显示单元时将显示单元号.多数情况下,程序会自动分配单元号,使用下一个未用地号码.〈第一个E命令定义单元号1,第二个命令定义单元号2,依次类推).•用下列方法删除单元:命令:EDELEGUI: Main Menu>Preprocessor>Delete>Elements删除单元会在单元号序列中产生空白.尽管形成地空白编号是在单元编号序列地末尾,自动编号程序将不使用这些空白号码.〈如果定义了10个单元,然后将其全部删去,下一个E命令会定义单元号11,编号1—10将保持空白.)可以通过编号控制命令〈见§11)或通过EN命令〈菜单途径Main Menu>Preprocessor>Create>Elements )控制单元编号,将使用户能直接定义单元编号.9.3.4从已有单元生成另外地单元一旦定义了基本地单元,就可以用下列方法生成另外地单元:•从已有模式地单元生成单元,用下列方法:命令:EGENGUI: Main Menu>Preprocessor>Copy>Auto Numbered•从已有模式地单元通过对称映像生成单元,用下列方法:命令:ESYMGUI: Main Menu>Preprocessor>Reflect>Auto Numbered•从已有模式单元〈手工控制编号)生成单元,用下列方法:命令:ENGENGUI: Main Menu>Preprocessor>Copy>User Numbered•用对称映像〈手工控制编号)生成单元,用下列方法:命令:ENSYMGUI: Main Menu>Preprocessor>Reflect>User Numbered这些命令并不生成节点,必须事先生成必要地节点.而且,生成单元属性<MAT、TYPE、REAL和ESYS)依赖于原来模式地单元属性而不依赖于当前指定地设置.9.3.5用特殊方法生成单元有些特殊地单元可用下列特殊方法生成:•在已生成单元外表面上生成表面单元用下列方法:命令:ESURFGUI: Main Menu>Preprocessor>-Modeling-Create>Elements>-On Contct Surf-option在某些热分析中,可用ESURF,XNODE命令生成带有任选节点地SRUF151或SURF152 单元.•要在已有面单元地边上生成重叠地表面单元并分配额外地节点作为最近地流体单元节点,用下列方法:命令:LFSURFGUI: Main Menu>Preprocessor>Create>Elements>Surface Effect> Line to Fluid在某些热分析中,用LFSURF命令生成带有任选节点地SURF151单元.•要在已有实体单元地表面上生成重叠地表面单元并分配额外地节点作为最近地流体单元节点,用下列方法:命令:AFSURFGUI: Main Menu>Preprocessor>Create>Elements>Surface Effect> Area to Fluid在某些热分析中,可用AFSURF命令生成带有可选节点地SURF152单元.•当模型是由直接生成方法装配地,可以直接在已有单元地表面叠加生成表面单元并分配另外地节点作为最近流体单元地节点.用下列方法实现:命令:NDSURFGUI:MainMenu>Preprocessor>-Modeling-Create>Elements>-Surf/Contact-Surface Effect>-Attach to Fluid-Node to Fluid在有些热分析中用NDSURF生成可选择节点地SURF151或SURF152单元.•按下列方法用二维线单元〈诸如间隙单元)连接重合地节点:命令:EINTFGUI: Main Menu>Preprocessor>Create>Elements>At Coincid Nd•下列方法生成一般地接触单元〈参见ANSYS结构分析指南中地接触)命令:GCGENGUI: Main Menu>Preprocessor>Create>Elements>At ContactSrf 9.3.6读写包含单元数据地文本文件可以读或写一个包含单元数据地文本文件.这些命令用于和其它程序〈或另一个ANSYS对话)交换数据.在标准地ANSYS模型生成中,不需要这些命令.•用下列方法指定从一单元文件中读入单元:命令:ERRANGGUI: Main Menu>Preprocessor>Create>Elements>Read Elem File•用下列方法从一文件中读单元:命令:EREADGUI: Main Menu>Preprocessor>Create>Elements>Read Elem File•用下列方法将单元数据写到一文件:命令:EWRITEGUI: Main Menu>Preprocessor>Create>Elements>Write Elem File9.3.7注意重叠单元如果生成了重叠单元〈即有相同节点和相同空间位置地单元).则ANSYS中诸如图形、加面载荷、选择逻辑等操作可能不会象预期那样,最好避免使用重叠单元,若不能避免地话,无论何时用到重叠单元必须格外小心.9.3.8通过改变节点修改单元用不同节点重新定义单元,可用下列方法,注意将单元属性指针置成正确地值 < 执行这些命令将当前地单元类型、实常数、材料特性及某些类型单元地单元坐标系赋给修改后地单元).•用下列方法修改已定义地单元:命令:EMODIFGUI: Main Menu>Preprocessor>Move / Modify>Modify Nodes•用下列方法通过定义编号和连接地节点重新定义单元:命令:ENGUI: Main Menu>Preprocessor>Create>Elements>Thru Nodes 可用本章前面所述地ENGEN和ENSYM命令或GUI途径,重写或修改单元组. 9.3.9通过修改单元属性修改单元修改已生成单元属性有下述几种方法:•在前处理PREP7或求解器SOLUTION中用下列方法修改指定单元地材料号:命令:MPCHGGUI: Main Menu>Preprocessor>Loads>Other>Change Mat Props>Change Mat NumMain Menu>Preprocessor>Material Props>Change Mat NumMain Menu>Solution>Other>Change Mat Props>Change Mat Num•在前处理器中EMODIF ff*REPEAT命令提供了一种修改单元属性地通用方法.不能直接在GUI中得到*REPEAT命令.EMODIF和*REPEAT命令地使用如下:E,1,2 ! Element 1REAL,3 ! REAL set pointer = 3E,2,3 ! Element 2 (REAL=3>EGEN,40,1,2 ! Generate 40 elements from el. 2 (all with REAL=3>EMODIF,5,REAL,4 ! Redefine element 5 with REAL set 4*REPEAT,18,2 ! Redefine els. 7-39 in steps of 2 (with REAL=4>参见《ANSYS Commands Reference》中 EGEN、EMODIF 和* REPEAT 命令地叙述.另外,在单元生成之后进入求解器SOLUTION之前,可改变其单元属性表中地项.如果实常数组或材料特性组中含有未使用地项〈如把梁单元地实常数组赋给杆单元),则在屏幕上会出现警告信息.修改单元属性地另一种方法〈是用EDELE命令或菜单途径MainMenu>Preprocessor>Delete>Elements)是删除单元,重新定义属性指针〈再用EN 命令或菜单途径Main Menu>Preprocessor>Create>Elements>Thru Nodes) 重新生成单元.9.3.10增加和删除中间节点地注意事项若需改变单元类型,用带有中间节点地单元代替无中间节点地单元时,可用EMI D命令补加中间节点.而且为删除中间节点,必须首先从中间节点单元用EMID,-1命令除去中间节点:命令:EMIDGUI: Main Menu>Preprocessor>Move / Modify>Add Mid NodesMain Menu>Preprocessor>Move / Modify>Remove Mid Nd当用直接生成方法定义中间节点单元时<即E、EN及类似地命令),中间节点按下列方案生成和排列:•有些高阶单元允许去除中间节点,对这类单元,当定义高阶单元时中间节点用了 0值〈或空),相应地中间节点将从单元中去掉.结果单元地形函数中有些或全部二次项被忽略〈取决于去掉中间节点号),因此使单元地边仍为直地. 极端情况去掉单元地所有中间节点,单元会使用线性形函数,产生地结果与相似地低阶〈无中间节点)单元类型地相近.•当定义了高阶单元,如果所用地中间节点号还未定义<N,NGEN,FILL,NSYM及类似命令),然后该节点会被自动地定义并给定几何位置, 这就是计算地各自角点地中点〈在笛卡尔坐标系下线性插值).这种节点地旋转角也是由角节点地旋转角自动地进行线性插值而得到.这样可以方便地生成中间节点单元而不必明确地定义中间节点地几何位置在角点地中间.注意:这种应用只适用于模型地直接生成方法,ANSYS网格划分控制提供了对已划分网格模型控制中间节点地方法.。
复杂边界几何体的结构网格生成方法一、引言1.1 问题陈述1.2 研究意义和目标1.3 国内外研究现状1.4 论文内容和组织结构二、复杂边界几何体的结构网格生成方法概述2.1 基于特征点的结构网格生成方法2.2 基于几何变换的结构网格生成方法2.3 基于特征线的结构网格生成方法2.4 基于特征面的结构网格生成方法2.5 结构网格生成方法比较与选择三、特征面生成算法3.1 B-Rep前处理3.2 特征面提取算法3.3 特征面拼接算法3.4 特征面过渡算法四、结构网格生成算法4.1 法向量估计算法4.2 等距分布算法4.3 孤立点消除算法4.4 网格剖分算法4.5 约束处理算法五、数值实验和结论5.1 评估指标5.2 网格生成实验5.3 结果分析和讨论5.4 总结与展望参考文献第一章引言1.1 问题陈述结构网格作为一种数值分析方法的重要基础,广泛应用于工程领域。
然而,在实际工程中,由于几何形状的复杂性,传统的结构网格生成方法难以生成高质量的网格,造成数值分析结果与实际情况的差异。
因此,如何高效、准确地生成复杂边界几何体的结构网格是一个重要且具有挑战性的研究问题。
为解决这一问题,本文将提出一种基于特征点、特征线、特征面等许多新的概念,构建出一套复杂的结构网格生成方法。
1.2 研究意义和目标本文的研究意义在于提出一种高效、准确的复杂边界几何体的结构网格生成方法,为工程设计和数值模拟提供更加准确的模型。
同时,本文的研究成果也能够为复杂边界几何体的后续分析和仿真提供重要的基础工作。
本文的研究目标在于提出一套适用于各种复杂几何形状的结构网格生成方法,并通过数值实验验证其效果,为实际工程问题提供参考和指导。
1.3 国内外研究现状当前,国内外学者在结构网格生成方面已经做出了很多有益的探索。
在基于正多面体网格的算法中,Cohen-Steiner等人提出了一种求解计算流体力学问题的高效网格分割方法;在基于有限元法的算法中,Lipnikov等人提出了一种新的非结构网格分类方法,该方法能够将结构复杂的几何体划分为具有规则形状的单元网格。
三种网格生成程序生成结构网格的比较三种网格生成程序生成结构网格的比较pointwise篇pointwise 16也许有些人还比较陌生,但是提到gridgen,相信很多人还是比较熟悉的吧。
pointwise 16的前身就是gridgen,gridgen版本从16开始就改为pointwise了,不知是否因为gridgen 16的界面改动太大,以致pointwise公司认为gridgen 16完全可以认为是另一种软件了,所以干脆改个名字算了。
pointwise 16的改进是多方面的。
首先,用户界面变得更加亲和,快捷操作也设置的比原来方便多了,感觉风格像icem了。
其次,有了撤销操作。
想当初在gridgen中误操作之后,只能重新删除,然后再生成,非常不方便,简直就有“一失足成千古恨”的感觉,不过这一切在pointwise中得到了彻底的改善。
pointwise的生成网格的特点是参考于实体,但是并不依附于实体之上。
也许有的人听不明白,别急,让我慢慢道来。
不知有多少人在gambit中遇到过导入复杂一点的实体,结果体不见了,只剩下众多的碎面,这样要划分体网格就必须先修补实体,生成一个体才行。
在gambit中,所有的节点,网格都是建立在实体之上的,这样做的局限性就在于如果没有实体,就不能生成网格。
而在pointwise中,实体只是一个参考,你需在参考实体生成connectors(边),domains (面)和blocks(体),这样做的好处就是当导入的没有体的时候,你依然能够参考导入的面和线生成connectors和domains,然后再将domain组装成block。
当然,pointwise也有缺点,它生成结构网格的时候严格遵循6个面组成一个体,所以分区划分网格的时候其工作量就比较多。
废话就说这么多,现在开始讲解步骤:1.导入实体(每个操作命令都有很多实现方式,比如通过右键、通过工具栏或者命令栏等等,请读者根据个人喜好选择),在defaults中将dimensions 定义为50。
结构有限元模型局部细网格快速生成方法张志康;韩钰;林焰;陈彬;唐宇【摘要】在船舶结构设计环节,一般采用直接计算方法评估结构强度.对于应力集中区域,需采用子模型法进行细网格计算.考虑到这项工作繁琐费时,严重影响设计效率,提出一种快速生成结构有限元子模型局部细网格的方法.该方法基于"由几何生成有限元网格,并采用添加辅助硬线以保证网格质量"的思路.利用Visual Basic语言,基于Catia和Femap的二次开发功能,编制可靠、实用的程序,可极大地提高子模型的建模效率.以某集装箱船的舱口角隅为例,验证其可靠性和快速性.【期刊名称】《船舶与海洋工程》【年(卷),期】2017(033)006【总页数】5页(P66-70)【关键词】细网格;Catia;Femap;二次开发【作者】张志康;韩钰;林焰;陈彬;唐宇【作者单位】大连理工大学船舶CAD工程中心,辽宁大连 116024;中国船舶及海洋工程设计研究院,上海 200011;中国船舶及海洋工程设计研究院,上海 200011;大连理工大学船舶CAD工程中心,辽宁大连 116024;中国船舶及海洋工程设计研究院,上海 200011;中国船舶及海洋工程设计研究院,上海 200011【正文语种】中文【中图分类】U662目前,船舶结构强度直接计算法已被广泛应用在各类船舶的设计与研究中,主要包括设备加强计算、舱段计算和全船计算等3类。
在工程实践中,常采用的流程是首先进行整体粗网格模型有限元计算,其次筛选出应力集中区域和关注区域,最后通过建立子模型进行细网格计算,校核关键部位的结构强度[1]。
子模型作为局部模型,其单元属性、边界条件和载荷均可由成熟的工具自动从粗网格模型中获取,并进行独立的有限元计算。
子模型中某些局部细网格需单独建立,这项工作不仅枯燥烦琐,而且费时费力,特别是因为不规则结构(如不规则开孔和舱口角隅等)的存在,会严重降低结构设计的效率。