Boost变换器的模糊控制实践
- 格式:pdf
- 大小:715.12 KB
- 文档页数:7
电流模式控制Boost变换器论文:电流模式控制Boost变换器分岔及其控制【中文摘要】电流模式控制Boost变换器是一种电压转换装备,相比较电压模式控制,电流模式控制的Boost变换器具有增益大、动态反应快、输出电感相对小、补偿电路相对简化且易于均流等众多优点,其广泛运用在各类用电设备上。
由于其电路结构的优势,在有源功率因数校正领域发挥重要作用,这些都是不争的事实。
但是这种电路有它自身的缺点,电流模式控制Boost变换器系统是一个强非线性系统,工作中易因电路参数选择不当或者外部干扰而是系统运行出现不稳定现象,严重地影响了其在各类用电设备的正常使用,所以其不稳定问题成为限制这类系统应用的重要瓶颈之一。
电流模式控制分为峰值电流控制和平均电流控制。
当采用峰值电流控制且占空比大于50%时,系统开环不稳定,容易产生次谐波振荡,其抗干扰能力差,特别当电感中纹波电流成分很少时,这种情况更严重。
目前工程上大都采用斜坡补偿法,利用斜坡信号叠加在电感电流上,从而得到控制系统稳定的作用。
但目前这种方法的参数选择(斜率m的取值)主要靠经验和重复实验,不能形象、客观地观察到系统运行规律。
在初期研究DC-DC变换器中混沌现象主要是通过数值仿真的方法,经过求解描述这些系统的微分方程得到系统运动的轨迹。
利用非线性理论研究非线性电路领域是目前较为前沿的研究手段,本文采用混沌等非线性理论研究电流模式控制Boost变换器。
针对Boost变换器的稳定性控制,目前已有很多的控制手段,总体可分为反馈控制和非反馈控制方法,非反馈控制方法的实用性很高,且这一方法比较成熟,目前采用比较多,但其也存在控制效率低、适用面窄、控制精度难以掌握等许多固有的缺陷。
工程上经常采用斜坡控制方法,但目前还是凭靠经验,不断地调整控制参数,这样大大增加了设计的工作量以及操作难度,因此限制了这一方法的推广应用。
本文将采用非反馈控制方法,分析研究电流模式控制Boost变换器在扰动强度及扰动相位共同作用下的系统二维分岔图,使我们更容易地观察以及总结到在两者控制下的电流模式控制Boost变换器系统的运行规律,从而便于工程人员在了解系统运行规律的前提下选择更精确的控制参数,减少设计过程的工程量以及操作难度。

适用于超级电容的双向变换器模糊PI控制策略针对直流微网中超级电容储能系統,提出了一种基于模糊PI控制的双向DC/DC变换器的双闭环控制方法。
首先分析了双向变换器的拓扑结构,开关管使用移相控制,利用模糊PI控制环节,降低超级电容端电压波动,提高了超级电容充放电的效率,使整个系统更加稳定。
运用matlab/Simulink搭建仿真模型,与其他控制方法进行了比较,验证了该方法的可行性和有效性。
标签:隔离型变换器;超级电容;双闭环控制;模糊PI控制0 引言超级电容作为一种新型储能元件,它的功率密度高,储能速度快,储能过程可逆,超级电容储能能够稳定微网中负载功率的高频分量[1,2]。
而双向DC/DC 变换器是电力电子能量转换的重要器件,可以实现不同电压等级的不同供电系统之间的能量转换,也是实现储能系统与光伏系统之间的能量转换的重要器件。
由于隔离型双向DC/DC变换器各器件电流、电压应力小,能量传递效率高,适用于中高功率的场合[3]。
因此本文采用隔离型双向DC/DC变换器进行超级电容储能的研究。
文献[4]通过互补PWM控制技术控制双向变换器,应用功率前馈与双闭环相结合的方法来解决直流母线电压波动的问题。
文献[5-6]基于直接功率控制方法,提出一种负载电流前馈控制方法,验证了负载突变对变换器动态响应的影响。
文献[7-8]对多端口电源系统中双向变换器,采用分段PI调节和滑膜控制结合的双闭环控制,通过实验验证了控制策略的可行性。
结合上述研究,本文提出了一种适用于超级电容储能,使用隔离型双向DC/DC变换器应用模糊PI控制的电压、电流双闭环控制策略,首先分析了隔离型双向变换器拓扑结构,对于双向转换器这种非线性时变系统,需要模糊PI对系统进行实时控制,同时采用电压、电流双闭环控制,提高系统稳定性,减小超级电容端电压在稳态状态下的电压波动,实现超级电容快速充放电控制。
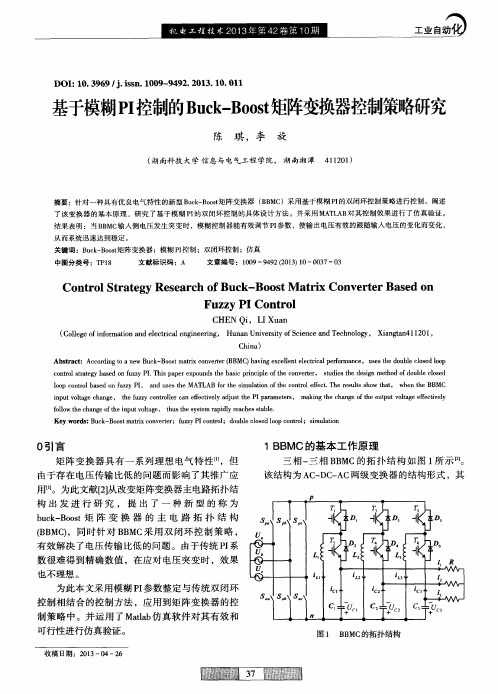
1 适用于超级电容的隔离型双向DC/DC变换器模糊PI控制策略1.1 双向DC/DC变换器拓扑结构本研究采用隔离型双向DC/DC变换器的电路结构作为超级电容器的充放电电路,其拓扑结构如图1所示。

适用于Boost三电平变换器的模型预测控制方法贾志东;姜久春;林泓涛;程龙;汪星华【摘要】相比于传统的双闭环控制,模型预测控制(MPC)具有动态响应快、无需调节PI参数以及可以增加系统状态变量约束等优点,被广泛应用于DC-DC变换器的控制中.而在大多数的研究中,一般采用的是有限控制集模型预测控制(FCS-MPC)方法,但这种控制方法无法提供固定的开关频率.因此,针对Boost三电平变换器,提出了一种基于连续控制集模型预测控制(CCS-MPC)的固定开关频率控制方法,其可同时实现输出电压控制以及平衡输出侧中点电位2个控制目标,并且在评价函数中无需调节不同控制目标的权重系数,简化了控制器参数设计难度.通过MATLAB/Simulink软件和dSPACE实时仿真系统进行仿真与实验,结果都证明了理论分析的正确性.【期刊名称】《电力自动化设备》【年(卷),期】2019(039)003【总页数】7页(P90-96)【关键词】模型预测控制;Boost三电平变换器;连续控制集;中点电位;开关频率【作者】贾志东;姜久春;林泓涛;程龙;汪星华【作者单位】北京交通大学国家能源主动配电网技术研发中心,北京100044;北京交通大学国家能源主动配电网技术研发中心,北京100044;北京交通大学国家能源主动配电网技术研发中心,北京100044;北京交通大学国家能源主动配电网技术研发中心,北京100044;中车唐山机车车辆有限公司,河北唐山063035【正文语种】中文【中图分类】TM460 引言Boost变换器因其具有结构简单、易于控制等优点,而被广泛应用于光伏系统、储能系统、电动汽车等领域[1-2]。
近年来,关于Boost变换器建模、拓扑结构、控制方法等方面的研究已经有了很多的进展。
相比于传统的Boost变换器,Boost三电平变换器具有开关应力低、开关损耗小等优点,逐渐成为DC-DC变换器研究的热点[3-5]。
Boost三电平变换器除了可以通过调节占空比控制输出电压之外,还可以在负载不平衡时通过调节两开关管通断时间来平衡中点电位。
目录第一章绪论 ............................................................................................................ - 1 -第二章PID对BOOST电路的控制及仿真...................................................................... - 2 -2.1 设计要求 ............................................................................................................. - 2 -2.2 设计思路 ............................................................................................................. - 2 -2.3 设计过程 ............................................................................................................. - 3 -2.4调制过程 ................................................................................................................ - 6 -2.5仿真结果及分析 .................................................................................................... - 8 -第三章FUZZY对BOOST电路的控制及仿真 ............................................................. - 12 -3.1 设计要求 ........................................................................................................... - 12 -3.2 设计思路 ........................................................................................................... - 12 -3.3 设计过程 ........................................................................................................... - 12 -3.3 调试及仿真结果 ............................................................................................... - 14 - 附录参考文献第一章绪论本文采用的boost电路是一种开关直流升压电路,即可以使输出电压比输入电压高它。
DC-DC Boost变换器控制算法的研究杨玉岗;甘汶桦【摘要】为了改善DC⁃DC Boost变换器的性能,在电压控制模式的基础上,设计了PI控制器,对输出电压进行控制。
分析了DC⁃DC Boost变换器的基本原理,推导了变换器的传递函数。
本文用Zie⁃gler⁃Nichols方法和Loop⁃Shaping方法计算出PI控制器中K p和K i的值,进而通过Matlab仿真和实验,比较了两种方法的输出响应,得出结论:采用Loop⁃Shaping方法能更好改善变换器的性能。
%To improve the control performance of DC⁃DC Boost power converters, a PI controller is designed to reg⁃ulate the output voltage based on voltage mode. The basic principle of the DC⁃DC Boost converter have been ana⁃lyzed, and the transfer function of the converter have been derived. The paper uses PI controller in which the val⁃ues of Kp and Ki have been derived using the Ziegler⁃Nichols method and Loop Shaping method, and through Matlab simulation and experiment, the output response of the both methods is compared and conclusion is made that Loop⁃Shaping method can improve the performance of the converter better.【期刊名称】《电工电能新技术》【年(卷),期】2015(000)003【总页数】4页(P72-75)【关键词】传递函数;PI控制器;Ziegler-Nichols方法;Loop-Shaping方法【作者】杨玉岗;甘汶桦【作者单位】辽宁工程技术大学电气与控制工程学院,辽宁葫芦岛125105;辽宁工程技术大学电气与控制工程学院,辽宁葫芦岛125105【正文语种】中文【中图分类】TM46DC-DC开关电源具有高效率、高功率密度和高可靠性等优点[1-3],现已被广泛地应用于通信、计算机、工业设备、家用电器等领域[4-6]。
Boost变换器混沌现象研究作者:郭锐董忠文来源:《数字技术与应用》2010年第10期摘要:电流控制型Boost变换器是电力电子系统中非线性现象研究的一个重要对象,具有规则的倍周期分岔结构,它能产生多种分岔形式,切分岔是其中的一种特殊分岔。
关键词:Boost混沌分岔中图分类号:TM3 文献标识码:A `文章编号:1007-9416(2010)10-0127-021 电路结构和工作原理电流模式控制Boost变换器是以电流为控制对象的一种DC-DC变换器,其电路原理图如图1(a)所示。
主电路拓扑分别包含1个电感、电容、开关管、二极管和负载电阻,为了研究方便,设电路处于理想状态。
根据开关管G的状态的不同,Boost变换器的电路拓扑也发生变化,假定变换器工作于连续导通模式,则有2种电路拓扑分别对应开关管G的2个状态,其微分方程描述为(1)式中x为状态矢量,即x=[iL,Vo]T,系数矩阵分别为:(2)工作过程中电感电流及电容电压的波形如图1(b)所示。
2 离散迭代非线性映射模型以n表示采样时刻,取电感电流in和电容电压vn为状态变量xn=[in,vn]T,则同步切换映射可以表示成如下形式:(3)其中δn是第n个PWM周期的占空比;,分别为第n个时刻和第n+1个时刻之间周期跳跃的数目。
该离散模型的推导过程比较繁琐,而且在实际仿真过程中需要计算周期跳跃的数目,增加了Matlab仿真难度。
图1(b)为电感电流、电容电压采样示意图,采用了同步切换映射的方法。
根据开关G闭合断开情况以及依据电感电流电压电压的连续性,得到其迭代方程为:(4)由此离散迭代映射模型,通过编程运行,可得到Boost变换器同步切换映射的分岔图,用插值的方法可以得到电压电流时域波形图、相空间轨迹图等。
3 Boost变换器由稳定到混沌的仿真分析下面从变换器的两个工作拓扑结构(G闭合时、G关断时),合并式(1)中的两个状态方程,推导出电流控制Boost DC-DC变换器的精确离散数学模型。
基于模糊PI的Boost PFC变换器的控制改进樊立萍; 冯翔【期刊名称】《《电测与仪表》》【年(卷),期】2019(056)022【总页数】6页(P121-125,145)【关键词】Boost PFC; 平均电流控制; 超前滞后补偿; 模糊控制【作者】樊立萍; 冯翔【作者单位】沈阳化工大学信息工程学院沈阳110142【正文语种】中文【中图分类】TM714.10 引言随着科技的飞速发展,计算机、笔记本电脑、电信和生物医学装置等电子设备的发展已经变得势不可挡。
这类电子设备的使用一般需要增加整流器之类的电力变换环节。
电力变换装置的高度非线性特性会带来高谐波、低功率因数等问题,导致供电线路发生电流畸变,对电网供电质量和用户使用安全性造成不良影响。
随着全球对绿色电力电子技术需求的不断增加,开发动态、可调节的电能质量改进方案成为电气、能源等领域普遍关注的问题。
功率因数校正(Power Factor Correction,PFC)技术能够对电力变换器的功率因数进行校正,在提高功率因数的同时有效降低对电网以及用电设备的谐波干扰[1],成为提高电能使用效率的有效手段。
功率因数校正装置多采用双环策略的平均电流控制方式,内环为电流环,外环为电压环。
传统的功率因数校正控制器大多根据超前滞后模型在频域上进行设计,并通过模拟电路实现。
这种方法在一些工程应用中被证明是有效的[2-3]。
但是由于电力变换器的非线性特性,使得简单的超前滞后模型难以达到令人满意的效果,而且这种模拟控制方式在调整参数时比较繁琐,难以适应运行条件的变化。
模糊PI控制器将常规PI控制与模糊理论相结合,不仅保留了PI控制器的调节参数少、参数物理意义清晰易懂的优点,而且具有模糊控制的不要求精确数学模型、可以融入经验知识等优点。
通过模糊逻辑的引入,可以充分利用模糊控制器对被控对象的时滞、非线性和时变性的一定适应能力,弥补一般超前滞后校正方法存在的参数调整困难、适应性差等问题[4-5]。
基于自整定模糊PID控制的Buck变换器设计与仿真摘要:本文针对Buck变换器的控制问题,使用自整定模糊PID控制算法进行设计和仿真。
首先对Buck变换器的工作原理和基本结构进行了介绍和分析,接着详细阐述了自整定模糊PID控制算法的基本原理和优点。
通过对仿真环境的搭建及参数的设定,对比了传统PID控制算法和自整定模糊PID控制算法的调节效果。
结果显示,自整定模糊PID控制算法具有更快的响应速度和更好的稳态性能,能够有效地解决Buck变换器的控制问题。
关键词:Buck变换器;自整定模糊PID控制;仿真正文:Buck变换器是一种常见的直流-直流变换器,主要应用于电子设备中的电能转换和电源管理。
作为一种负载变量调节器,Buck变换器的运行需要精确的控制和调节。
传统的PID控制算法虽然常用,但是在控制精度和性能方面存在不足。
为此,本文采用自整定模糊PID控制算法进行Buck变换器的控制设计和仿真。
首先,对Buck变换器的工作原理进行了简要介绍。
Buck变换器是一种开关型电源,通过控制输入电压的占空比来控制输出电压。
其基本结构由开关管、电感、电容和负载组成,电感和电容的大小是控制Buck变换器输出电压的主要参数。
理论上,当输入电压和输出电流相等时,Buck变换器的输出电压为固定值。
但是在实际应用过程中,由于负载变化等原因,可能导致输出电压的不稳定和波动。
针对Buck变换器的控制问题,本文提出了一种自整定模糊PID控制算法。
相比于传统PID控制算法,自整定模糊PID控制算法具有更好的自适应性和不确定性处理能力。
通过对模糊控制器的模糊化、数据归一化、模糊推理和去模糊化等操作,可以实现对Buck变换器的精确控制和调节。
在仿真方面,本文采用MATLAB软件中的Simulink工具箱进行了仿真环境的搭建和参数的设定。
通过对比传统PID控制算法和自整定模糊PID控制算法的调节效果,可以发现自整定模糊PID控制算法具有更快的响应速度和更好的稳态性能。
Boost变换器的模糊控制实践
夏毅
一、引言
模糊控制是智能控制中一种基于规则的控制,它直接采用语言型控制规则,出发点是现场操作人员的控制经验或相关专家的知识,在设计中不需要建立被控对象的精确的数学模型,因而使得控制机理和策略易于接受与理解,设计简单,便于应用。
DC-DC变换器是一种强非线性电路,它的建模及其控制方法是电路分析设计的关键环节, 但由于本身固有的非线性、混沌性等问题给其精确建模与控制带来困难, 建立适合实时控制的DC-DC 变换器模型与优化控制方案, 是必须解决的问题。
通过学习现代控制理论以及智能控制理论,参考相关文献,尝试针对Boost变换器构建模糊控制器,以期望改善运行性能。
二、Boost电路开关过程分析
Boost电路基本拓扑结构和两个工况分别如图1、图2所示。
图1 Boost电路基本结构
图2 Boost变换器电感电流连续是两种工作状态
(a)Boost电路开关管导通状态;(b)Boost电路开关管关闭状态定义半导体功率器件开关一个开关周期为T s,开关接通时间为T on,断开时间为T off,
T on占T s的比例未导通占空比D:
通过调节D,就可以有效地调节电路的输出电压。
在开关管开通和关断两种工作状态下可以求出:
其中U0为输出电压,U s为输入电压。
三、模糊控制器的设计
图3 模糊控制器原理
设计一个二维的模糊控制器,他的输入变量为偏差e和偏差的变化率ec,输出为控制量u,相应的模糊集分别为E、EC和U。
E、EC和U的模糊子集都为{NB,NM,NS,Z0,PS,PM,PB},其论域为(-6,6)。
隶属度函数均选择三角型模糊函数。
具体过程如下:在MATLAB命令窗口键入fuzzy运行“FIS Editor”,采用Mamdamni型模糊控制器,在FIS Editor中添加E和EC两个输入以及一个输出U,如图4所示,三个变量的论域均为[-6,6],E、EC和U均采用Trimf型的隶属度函数,并且将每一个变量的“Membership function plots”设置为{NB,BM,NS, Z0,PS,PM,PB}。
E、EC和U变量的隶属函数设置如下图5-图7所示:
图4 Fis Editor
图5 输入E的隶属函数
图6 输入EC的隶属函数
图7 输出U的隶属函数
在View选项下选择Edit Rule 一项来进行编辑模糊规则根据实际经验,得出模糊控制规则表:
EC E
NB NB NB NM NM Nm NS NS NM NB NM NM NS NS Z0 PS NS NM NM NS NS Z0 PS PM Z0 NM NM NS Z0 PS PM PM PS NM NS Z0 PS PS PM PM PM NS Z0 PS PS PM PM PM PB NS PS PM PM PM PB PB
表1 模糊控制规则表
编辑Rule Editor如图8所示:
图8 Rule Editor
四、控制电路仿真
在SIMULINK中建立的模糊控制仿真模型框架图如图9所示。
将完成设计完成的模糊控制器xiayifuzzycontrol.fis导入Fuzzy Logic Controller。
经过在SIMULINK上进行仿真后,所得到的结果截图如图10所示
图9 Simulink仿真模型
图10 仿真结果
五、总结
采用Fuzzy控制的算法, 使系统的响应速度快、超调量小、调节精度高, 具有较强的鲁棒性, 这是PID控制难以实现的, 它的一个显著特点就是在同样精度要求下, 系统的过渡时
间变短, 这在实际的过程控制中将有重大的意义。
但由于时间紧迫、初次接触现代控制理论以及智能控制理论,学生对模糊控制这一控制方法策略还缺少更加深入的理解与认知,本文通过借鉴相关文献的思想和设计,将文献的内容扩充,具体化完成,文中定有很多不足之处,必将在以后的学习中学习改进。