8.4位移法的基本结构及位移法方程
- 格式:ppt
- 大小:264.56 KB
- 文档页数:12




![[工学]位移法](https://img.taocdn.com/s1/m/8f40a05c1711cc7931b7167e.png)



【读数笔记xxx】第8章8.1 位移法的基本概念位移法与力法的基本区别:1.力法以多余未知力(支反力或内力)为基本未知量,位移法以结点的独立位移(角位移或线位移)为基本未知量。
2.力法是把超静定结构拆成静定结构(即基本结构),作为其计算单元,而位移法则是把结构拆成杆件,作为其计算单元。
位移法分析中需要解决的三个问题:1.确定杆件的杆端内力与杆端位移及荷载之间的函数关系(即杆件分析或单元分析)2.选取结构上哪些结点位移作为基本未知量。
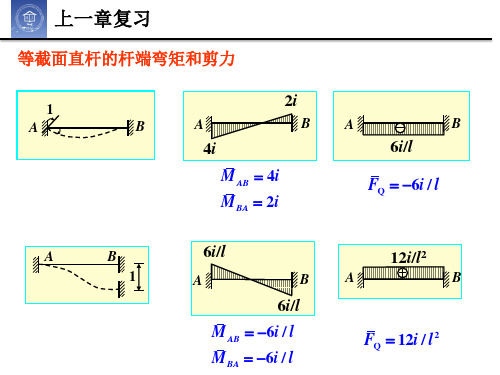
3.建立求解这些基本未知量的位移法方程(即整体分析)8.2等截面直杆的转角位移方程由8.1可以知道,位移法的计算单元是杆件,所以位移法首先应确定杆件的杆端内力与杆端位移及荷载之间的函数关系(杆件的转角位移方程)。
杆端内力正负号的规定:杆端弯矩对杆端而言,以顺时针方向为正,反之为负。
对结点或支座而言,则以逆时针方向为正,反之为负。
杆端剪力和杆端轴力的正负号规定,仍与前面规定相同。
杆端位移的正负号规定:角位移以顺时针为正,反之为负。
线位移以杆的一端相对于另一端产生顺时针方向转动的线位移为正,反之为负。
由杆端单位位移引起的杆端内力称为形常数。
i=EI/l,称为杆件的线刚度。
由荷载或温度变化引起的杆端内力称为载常数。
其中的杆端弯矩也常称为固端弯矩,用表示;杆端剪力也常称为固端剪力,用表示。
转角位移方程:应用以上三组转角位移方程,即可求出三种基本的单跨超静定梁的杆端弯矩。
至于杆端剪力,则可根据平衡条件导出为:对上述三种基本的单跨超静定梁的杆端剪力表达式,也可根据叠加原理,写出如下:8.3位移法的基本未知量位移法选取结点的独立位移,包括结点的独立角位移和独立线位移,作为其基本未知量,并用广义位移符号Zi表示。
、位移法基本未知量的总数目(记作n)等于结点的独立角位移数(记作ny)与独立线位移数(记作nl)之和,即n=ny+nl结点独立角位移数(ny)一般等于刚结点数加上组合结点(半铰结点)数,但须注意,当有阶形杆截面改变处的转角或抗转动弹性支座的转角时,应一并计入在内。







第十七章位移法求解超静定结构的两种最基本的方法力法适用性广泛,解题灵活性较大。
(可选用各种各样的基本结构)。
位移法在解题上比较规范,具有通用性,因而计算机易于实现。
位移法可分为:手算——位移法电算——矩阵位移法力法位移法力法与位移法最基本的区别:基本未知量不同力法:以多余未知力基本未知量位移法:以某些结点位移基本未知量F PϕBϕB在忽略杆轴向变形和剪切变形的条件下,结点B 只发生角位移ϕB 。
由于结点B 是一刚结点,故汇交于结点B 的两杆的杆端在变形后将发生与结点相同的角位移。
位移法计算时就是以这样的结点角位移作为基本未知量的。
第一节位移法的基本概念BAClhEI 1EI 2首先,附加一个约束使结点B 不能转动,此时结构变为两个单跨超静定梁。
称为位移法的基本结构。
在荷载作用下,可用力法求得两根杆的弯矩图。
由于附加约束阻止结点B 的转动,故在附加约束上会产生一个约束力矩1631l F F P P -=C BAF P316Fl 532FlCAB然后,为了使变形符合原来的实际情况,必须转动附加约束以恢复ϕB 。
两个单跨超静梁在B 端有角位移时的弯矩图,同样可由力法求得。
此时在附加约束上产生约束力矩Bh EI lEI F ϕ⎪⎭⎫ ⎝⎛+=211143ϕB ϕBBA CB lEI ϕ13B h EI ϕ24B hEI ϕ22F PBAC求基本未知量,可分两步完成:1)在可动结点上附加约束,限制其位移,在荷载作用下,附加约束上产生附加约束力;2)转动附加约束使结点产生角位移ϕB ,使结构发生与原结构一致的结点位移。
ϕBϕB附加刚臂经过上述两个步骤,附加约束上产生约束力矩应为F 11和F 1P 之和。
由于结构无论是变形,还是受力都应与原结构保持一致,而原结构在B 处无附加约束,亦无约束力矩,故有F 11+F 1P =001634321=-⎪⎭⎫⎝⎛+Fl h EI lEI B ϕ解方程可得出ϕB 。
位移法典型方程将求出后ϕB ,代回图22-1c ,将所得的结果再与图22-1b 叠加,即得原结构(图22-1a )的解。