第八章位移法习题解答
- 格式:doc
- 大小:3.26 MB
- 文档页数:16
第8章 位移法习 题一、判断题:1、位移法未知量的数目与结构的超静定次数有关。
( )2、位移法的基本结构可以是静定的,也可以是超静定的。
( ) 4、位移法典型方程的物理意义反映了原结构的位移协调条件。
( )5、图示结构,当支座B 发生沉降∆时,支座B 处梁截面的转角大小为12./∆l ,方向为顺时针方向,设EI =常数。
( )6、图示梁之 EI =常数,当两端发生图示角位移时引起梁中点C 之竖直位移为(/)38l θ(向下)。
( )2θθC7、图示梁之EI =常数,固定端A 发生顺时针方向之角位移θ,由此引起铰支端B 之转角(以顺时针方向为正)是-θ/2 。
( )8、用位移法可求得图示梁B 端的竖向位移为ql EI 324/。
( )q9、结 构 按 位 移 法 计 算 时 , 其 典 型 方 程 的 数 目 与 结 点 位 移 数 目 相 等 。
( ) 10、位移法求解结构内力时如果P M 图为零,则自由项1P R 一定为零。
( ) 11、超 静 定 结 构 中 杆 端 弯 矩 只 取 决 于 杆 端 位 移 。
( ) 12、图示梁之 EI =常数,当两端发生图示角位移时引起梁中点C 之竖直位移为(/)38l θ(向下)。
2θθC二、填空题:13、判断下列结构用位移法计算时基本未知量的数目。
(1) (2) (3)(4) (5) (6)EIEIEIEI 2EI EI EIEIEA EA ab EI=EI=EI=24442第13题14、位移法可解超静定结构、静定结构,位移法典型方程体现了_______条件。
15、图示梁A 截面的角位移φA = ____________。
(杆长l,荷载作用在中点)16、图示结构,M AB = __________。
17、图示刚架,各杆线刚度i 相同,不计轴向变形,用位移法求得 M AD = ,M BA =___________。
Di i i A4518、图示结构M BA 的值为_____________,________________侧受拉。
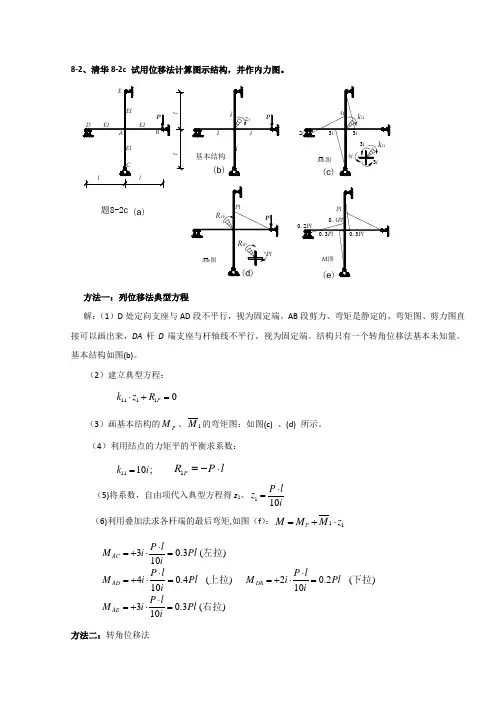
8-2、清华8-2c 试用位移法计算图示结构,并作内力图。
题8-2c (a )方法一:列位移法典型方程解:(1)D 处定向支座与AD 段不平行,视为固定端。
AB 段剪力、弯矩是静定的,弯矩图、剪力图直接可以画出来,DA 杆D 端支座与杆轴线不平行,视为固定端。
结构只有一个转角位移法基本未知量。
基本结构如图(b)。
(2)建立典型方程:11110P k z R ⋅+=(3)画基本结构的P M 、1M 的弯矩图:如图(c) 、(d) 所示。
(4)利用结点的力矩平的平衡求系数:1110;k i =1P R P l =-⋅(5)将系数,自由项代入典型方程得z 1。
110P lz i⋅=(6)利用叠加法求各杆端的最后弯矩,如图(f ):11P M M M z =+⋅30.3()1040.4()20.2()101030.3()10AC AD DA AEP lM i Pl i P l P lM i Pl M i Pl i iP l M i Pl i⋅=+⋅=⋅⋅=+⋅==+⋅=⋅=+⋅=左拉上拉下拉右拉 方法二:转角位移法(c)ACMAB(d)(b)(e)Q ABF Q解:(1)确定结构的基本未知量。
有一个角位移z1,如图所示(b)。
(2)列杆端的转角位移方程:AB段剪力和弯矩静定,DA杆D端支座与杆轴线不平行,视为固定端。
C1111,,3,3,4,2 FAB AB A AE AD DAM Pl M Pl M i z M i z M i z M i z =-=-=⋅=⋅=⋅=⋅(3)根据刚结点的力矩平衡,列位移方程,求未知量z1:111100343010AB AC AD AEPl M M M M M Pl i z i z i z zi =→+++=→-+⋅+⋅+⋅=→=∑(4)将所求位移代回转角位移方程求各杆端力,并作结构的弯矩图,如图(c)所示。
C1111,,330.3,330.3,1010440.4,220.21010FAB ABA AEAD DAM Pl M PlPl PlM i z i Pl M i z i Pli iPl PlM i z i Pl M i z i Pli i=-=-=⋅=⨯==⋅=⨯==⋅=⨯==⋅=⨯=讨论;本题将D处的滑动支座改为与杆轴线平行。


习 题8-1 试说出单元刚度矩阵的物理意义及其性质与特点。
8-2 试说出空间桁架和刚架单元刚度矩阵的阶数。
8-3 试分别采用后处理法和先处理法列出图示梁的结构刚度矩阵。
(a)解:(a )用后处理法计算 (1)结构标识(2)建立结点位移向量,结点力向量[]T44332211 θνθνθνθν=∆[]Ty M F M F M F M F F 4y43y32y211 =θ(3)计算单元刚度矩阵⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡-=⎥⎥⎦⎤⎢⎢⎣⎡=2222322211211462661261226466126122EI 21 l l -l l l -l -l l -l l l l - l k k k k k ①①①①①⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡-=⎥⎥⎦⎤⎢⎢⎣⎡=222233332232223 33 6 3632336 362EI 21 l l - l l l - l -l l -l l l -l l k k k k k ②②②②②lll⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡-=⎥⎥⎦⎤⎢⎢⎣⎡=222234443343323 33 6 3632336 362EI 2 1 l l - l l l - l -l l -l l l -l l k k k k k ③③③③③(4)总刚度矩阵⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡++=222222222234443343333322322222112112 3300003 6 3 6 000 03403003601236000 0 3632600 363186120000 26460 0 0 06126122EI 0 0 00 0 0 4 3 2 1 4 3 2 1 l l -l l l - l - - l l -l l l l - l - - l l -l l -l l l l - -l -- l l -l l l l - l k k k k k k k k k k k k k ③③③③②②②②①①①①θ (5)建立结构刚度矩阵支座位移边界条件[][]00004311 θ θ θν=将总刚度矩阵中对应上述边界位移行列删除,得刚度结构矩阵。
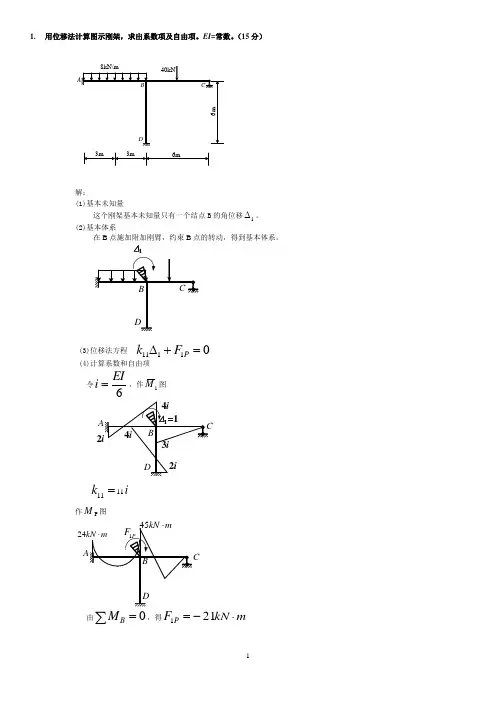
1. 用位移法计算图示刚架,求出系数项及自由项。
EI =常数。
(15分)解:(1)基本未知量这个刚架基本未知量只有一个结点B 的角位移1∆。
(2)基本体系在B 点施加附加刚臂,约束B 点的转动,得到基本体系。
Δ1(3)位移法方程01111=+∆P F k(4)计算系数和自由项令EI i =,作1M 图2=11k 11i作P M 图24由0=∑B M ,得=P F 1m kN ⋅-21⑸解方程组,求出=∆1i11212.用位移法计算图示刚架,求出系数项和自由项。
(15分)解:(1)基本未知量这个刚架基本未知量只有一个结点B 的角位移1∆。
(2)基本体系在B 点施加附加刚臂,约束B 点的转动,得到基本体系。
(3)位移法方程01111=+∆P F k(4)计算系数和自由项令lEIi =,作1M 图=12得=11k 12i作P M 图P得=P F 18Pl3用位移法计算图示刚架,求出系数项及自由项。
EI =常数。
(15分)解:(1)基本未知量这个刚架基本未知量只有一个结点B 的角位移1∆。
(2)基本体系在B 点施加附加刚臂,约束B 点的转动,得到基本体系。
(3)位移法方程 01111=+∆P F k(4)计算系数和自由项令lEI i =,作1M 图得=11k8i作PM图得4、用位移法计算图示刚架,求出系数项和自由项。
l l / 2 l / 2解:(1)基本未知量这个刚架基本未知量只有一个结点角位移1∆。
(2)基本体系在刚结点施加附加刚臂,约束B点的转动,得到基本体系。
基本体系(3)位移法方程01111=+∆P F k(4)计算系数和自由项令l EIi =,作1M 图 得=11k 12i 作P M 图 得=P F 18Pl F P F P5、用位移法计算图示刚架,求出系数项及自由项。
EI =常数。
2m2m 4m4m(1)基本未知量这个刚架基本未知量只有一个结点角位移1∆。
(2)基本体系在刚结点施加附加刚臂,约束结点的转动,得到基本体系。
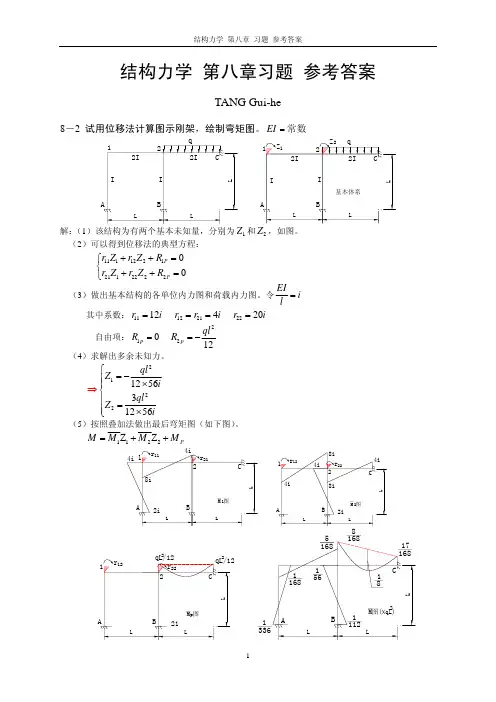
三、用位移法计算图示连续梁,并绘出弯矩图。
各杆EI 相同且为常数。
(10分)解:(1)选取基本结构如下图所示,Δ1为基本未知量。
(2)写出位移法方程如下:k 11Δ1+ F 1P = 0(3)计算系数k 11及自由项F 1P 令EIi =12,则 i AB =3i , i BC =2ik 11 = 12i+2i =14i 1P 40F =3kN •m (4)求解位移法基本未知量将系数及自由项代入位移法方程,得:1P 11140F 203k 14i 21i∆=-=-=-(5)作M 图基本结1M6i M P图4040四、用位移法计算图示刚架,并绘制弯矩图。
(10分)解: (1)选取基本结构如下图所示,Δ1、Δ2为基本未知量。
(2)写出位移法方程如下: k 11Δ1+ k 12Δ2+ F 1P = 0 k 21Δ1+ k 22Δ2+ F 2P = 0 (3)计算系数及自由项 令EIi =4,则 i AB = i BC =2i , i BE = i CF = i , i CD =4 i 作1M 图、2M 图和M P 图如下:D基本结构D1M 图k 11 = 8i+4i+8i =20ik 21 =4i k 21 = k 12 =4ik 22 = 8i+4i=12iF 1P =40 kN •m F 2P =-30 kN •m (4)求解位移法基本未知量将系数及自由项代入位移法方程,得: 20i Δ1+ 4i Δ2+40= 0 4i Δ1 +12i Δ2-30= 0 解得: 17528i ∆=- 29528i∆= (5)作M 图D2DP {DM图五、用位移法计算图示刚架,并绘出弯矩图。
(10分)解: (1)对称结构受对称荷载作用,可简化为如下结构: 选取基本结构如图所示,Δ1为基本未知量。
(2)写出位移法方程如下:k 11Δ1+ F 1P = 0(3)计算系数k 11及自由项F 1P 令EIi =L,则 i AD = i DE =i 作1M 图和M P 图如下:E1M基本结构k 11 = 4i+4i =8i21P qL F =12(4)求解位移法基本未知量将系数及自由项代入位移法方程,得:221P 111qL F qL 12k 8i 96i∆=-=-=- (5)作M 图由对称性,得原结构的M 图如下:EPE5qL 48M 图22qL25qL 48M 图22qL 22qL 48六、用位移法计算图示刚架(利用对称性),并绘出弯矩图。
结构力学位移法题目及详细解答位移法中含无穷刚度杆的结构是考研结构力学的一大难点,很多热门院校都喜欢出这类型的题目,下面以两道有复杂牵连位移的含无穷刚度杆位移法题目为例,对三种解法进行讲解,题目取自东南大学真题和烟台大学真题。
1.用位移法绘制图示结构的弯矩图,BC杆 EI=∞,其余各杆 EI 为常数(东南大学2017年真题)。
解:根据局部变形图找出位移牵连关系,B点角位移,B点竖向线位移,C点角位移三者牵连,只有1个独立,有三种方法。
法一:基本体系一:以 B点竖向线位移为基本未知量,难点是无穷刚结点处会引起线位移和角位移,过程如图:M2¯图绘制是一个难点,需要通过无穷刚度杆的局部变形图判断弹性杆的变形,从而指导画出形常数图。
计算过程略,最后弯矩图如图:法二:基本体系二:以 C 点角位移为基本未知量,难点是剪力平衡,过程如下:M2¯图绘制是一个难点,需要通过无穷刚度杆的局部变形图判断弹性杆的变形,从而指导画出形常数图。
法二的典型错误:无穷刚度杆弯矩图不会画。
正确思路:从弹性杆画到无穷刚度杆,通过刚结点平衡条件确定杆端弯矩,杆上没有集中力作用,剪力不变,弯矩图斜率相同。
这里注意,超静定结构在荷载作用下内力值只与刚度相对值有关,与绝对值无关,所以从弹性杆到无穷刚度杆弯矩是不会倍增的。
另外,若有集中力作用于无穷刚度杆上,则按照简支梁叠加即可。
法三:基本体系三:以B点角位移为基本为质量,难点是剪力平衡,过程如下:点评:法三位移一定可以发生,因为线位移和两个角位移有两个独立,一个牵连,刚结点任取一个角位移都可以是独立的,无穷刚度杆上增加刚臂后相当于大地固定端,不能动,刚臂发生相当于固定端发生单位角位移的支座移动。
8-2、清华8-2c 试用位移法计算图示结构,并作力图。
题8-2c (a )方法一:列位移法典型方程解:(1)D 处定向支座与AD 段不平行,视为固定端。
AB 段剪力、弯矩是静定的,弯矩图、剪力图直接可以画出来,DA 杆D 端支座与杆轴线不平行,视为固定端。
结构只有一个转角位移法基本未知量。
基本结构如图(b)。
(2)建立典型方程:11110P k z R ⋅+=(3)画基本结构的P M 、1M 的弯矩图:如图(c) 、(d) 所示。
(4)利用结点的力矩平的平衡求系数:1110;k i =1P R P l =-⋅(5)将系数,自由项代入典型方程得z 1。
110P lz i⋅=(6)利用叠加法求各杆端的最后弯矩,如图(f ):11P M M M z =+⋅30.3()1040.4()20.2()101030.3()10AC AD DA AEP lM i Pl i P l P lM i Pl M i Pl i iP l M i Pl i⋅=+⋅=⋅⋅=+⋅==+⋅=⋅=+⋅=左拉上拉下拉右拉 方法二:转角位移法(c)ACMAB(d)(b)(e)Q ABF Q解:(1)确定结构的基本未知量。
有一个角位移z1,如图所示(b)。
(2)列杆端的转角位移方程:AB段剪力和弯矩静定,DA杆D端支座与杆轴线不平行,视为固定端。
C1111,,3,3,4,2 FAB AB A AE AD DAM Pl M Pl M i z M i z M i z M i z =-=-=⋅=⋅=⋅=⋅(3)根据刚结点的力矩平衡,列位移方程,求未知量z1:111100343010AB AC AD AEPl M M M M M Pl i z i z i z zi =→+++=→-+⋅+⋅+⋅=→=∑(4)将所求位移代回转角位移方程求各杆端力,并作结构的弯矩图,如图(c)所示。
C1111,,330.3,330.3,1010440.4,220.21010FAB ABA AEAD DAM Pl M PlPl PlM i z i Pl M i z i Pli iPl PlM i z i Pl M i z i Pli i=-=-=⋅=⨯==⋅=⨯==⋅=⨯==⋅=⨯=讨论;本题将D处的滑动支座改为与杆轴线平行。
(b)(e)(d)MAB(c)Q ABF Q解:(1)确定结构的基本未知量。
有一个线位移z1,如图所示(b)。
(2)列杆端的转角位移方程:AB段剪力和弯矩静定。
C1111,,3,3,,FAB AB A AE AD DAM Pl M Pl M i z M i z M i z M i z =-=-=⋅=⋅=⋅=-⋅(3)根据刚结点的力矩平衡,列位移方程,求未知量z1:1111003307AB AC AD AE PlM M M M M Pl i z i z i z z i=→+++=→-+⋅+⋅+⋅=→=∑ (4)将所求位移代回转角位移方程求各杆端力,并作结构的弯矩图,如图(c)所示。
C 1111,,3333,33,777711,7777F AB AB A AE ADDA M Pl M Pl Pl Pl M i z i Pl M i z i Pl i i Pl Pl M i z i Pl M i z i Pli i =-=-=⋅=⨯==⋅=⨯==⋅=⨯==-⋅=-⨯=- 类8-2 d 、试用位移法典型方程计算图示结构,并作力图。
4q =20k N /mq =20k N /m解:1)基本结构如图(b),有两个位移法未知量。
2)列典型方程:111122*********P P k z k z R k z k z R ⋅+⋅+=⎧⎨⋅+⋅+=⎩ 3)画基本结构在下述情况的弯矩图:荷载单独作用下的P M 图、只让刚臂1单独转过正的单位转角的1M 图以及只让刚臂2发生正的单位转角的2M 图,如图(c) 、(d) 、 (e)。
4)利用结点的力矩平衡,和横梁力的平衡求系数:(c):1225;0P P R R =-⋅=kN m ;(d):11125;2k i k i ==(e):21222;11k i k i ==5)将系数,自由项代入典型方程得z 1、z 2。
12275505151z z ii-==6)利用叠加法求各杆端的最后弯矩,如图(f ):2211z M z M M M P ⋅+⋅+=27550150217()()515127550150411.1()()515150003 2.9()()512755015248.1()()515127550154234.6()()5151AB BA BC BD DB DE M i kN m i i M i kN m i i M i kN m i M i i kN m i i M i i kN m i iM -=-+⋅+⋅=-⋅-=++⋅+⋅=⋅-=++⋅=-⋅-=-+⋅+⋅=-⋅-=++⋅+⋅=⋅左拉左拉上拉左拉左拉2755.4()()512755.4()()51ED i kN m i M i kN m i =⋅=⋅=-⋅=-⋅下拉下拉 3、清华5-3a 试用位移法典型方程计算图示结构,并作力图。
4i清华 题5-3(a )解:(1)DE 段剪力、弯矩是静定的,弯矩图、剪力图直接可以画出来。
结构有两个位移法基本未知量。
基本结构如图(b)。
(2)建立典型方程:111122*********0P Pk z k z R k z k z R ⋅+⋅+=⎧⎨⋅+⋅+=⎩(3)画基本结构在下述情况的弯矩图:荷载单独作用下的P M 图、只让刚臂1单独转过正的单位转角的1M 图以及只让附加连杆2发生正的单位线位移的2M 图,如图(c) 、(d) 、 (e)。
(4)利用结点的力矩平衡,和横梁力的平衡求系数:1230;0P P R R =-⋅=kN m ;1122122121567;;i ik i k k k l l====-(5)将系数,自由项代入典型方程得z 1、z 2。
1215060;2323lZ Z i i==(6)利用叠加法求各杆端的最后弯矩,如图(f ):2211z M z M M M P ⋅+⋅+=15066002 2.61()()23231506600410.43()()232315030310.43()()2320()()360007.83()()23AC CA CD DC DE BD i lM i kN m i l i i lM i kN m i l i M i kN m iM kN m M i lM kN m l i=+⋅-⋅=-⋅=+⋅-⋅=⋅=-+⋅=-⋅=⋅=-=+-⋅=-⋅左拉左拉上拉上拉左拉8-3c 、试用位移法典型方程计算图示刚架,并做弯矩图,EI =常量。
解:(1)外伸段剪力、弯矩是静定的,弯矩图、剪力图直接可以画出来。
结构有两个位移法基本未知量。
基本结构如图(b)。
(2)建立典型方程: 111122*********P P k z k z R k z k z R ⋅+⋅+=⎧⎨⋅+⋅+=⎩BA (d )(e )(b )lV (c )(a )(3)画基本结构在下述情况的弯矩图:荷载单独作用下的P M 图、只让刚臂1单独转过正的单位转角的1M 图以及只让附加连杆2发生正的单位转角的2M 图,如图(c) 、(d) 、 (e)。
(4)利用结点的力矩平衡,和横梁力的平衡求系数:12353104()30;1026.875248P P c R R ⨯⨯=⋅=-⨯--=-⋅:kN m kN m ;1111k i =(d )22122122624() 1.875;344i ie k i k k i =+===-(5)将系数,自由项代入典型方程得z 1、z 2。
11111221122112222122 2.097011330003 1.87526.875017.688P P Z k z k z R i z i z ik z k z R i z i z Z i ⎧=⎪⋅+⋅+=⋅-⋅+=⎧⎧⎪→→⎨⎨⎨⋅+⋅+=-⋅+⋅-=⎩⎩⎪=⎪⎩(6)利用叠加法求各杆端的最后弯矩,如图(f ):2211z M z M M M P ⋅+⋅+=2.097617.68817.5044.03()()42.09717.688303036.29()()AB CBi M kN m i i M i kN m i i=-+⨯-⨯=-⋅=+⨯-⋅=⋅左拉上拉2.0971217.6880836.29()()42.0971217.6880444.68()()4CD DCi M i kN m i i i M i kN m i i=+⨯-⨯=-⋅=+⨯-⨯=-⋅右拉左拉讨论:试用力法典型方程计算图示刚架,并做弯矩图,EI =常量。
图15-15(a )(d )x(e )(b )(c )解:(1)外伸段段剪力、弯矩是静定的,弯矩图、剪力图直接可以画出来。
结构有两个力法基本未知量。
基本结构如图(b)。
(2)建立典型方程:111122*********0P Pz z z z δδδδ⋅+⋅+∆=⎧⎨⋅+⋅+∆=⎩(3)画基本结构在下述情况的弯矩图:画荷载单独作用下的P M 图、两单位力分别单独的单位弯矩1M 图和2M 图,如图(c) 、(d) 、 (e)。
4)图乘求系数:12112215412111254570(204)6323311111330(408)(12541)22211482331181412033P P EI EI EI EI EI EI EIEI EIEI EI EI δδ⨯⨯⨯⨯∆=--⨯⨯⨯+=∆=⨯⨯⨯+⨯⨯⨯=⨯⨯=⨯=⨯⨯⨯⨯=+=;5)将系数,自由项代入典型方程得x 1、x 2。
12111122112112222212825700044.03233022033036.2903P P x x x x x EI EI EIx x x x x EIEI EI δδδδ⎧⋅+⋅+=⎪⋅+⋅+∆==-⎧⎧⎪→→⎨⎨⎨⋅+⋅+∆==-⎩⎩⎪⋅+⋅+=⎪⎩ 6)利用叠加法求各杆端的最后弯矩,如图(f ):1212P M M M x M x =+⋅+⋅01(44.032)0(36.29)44.03()()5()()00(44.032)1(36.29)36.29()()00(44.032)1(36.29)36.29()()1251(44.032)1(36.29)44.68()()AB BA CB CD DC M kN m M kN m M kN m M kN m M kN m =+⨯-+⨯-=-⋅=⋅=+⨯--⨯-=⋅=+⨯-+⨯-=-⋅=--⨯--⨯-=-⋅左拉左拉上拉右拉左拉 8-4c 、试用位移法典型方程计算图示结构,并作力图。