第二章 模糊集合论基础
- 格式:ppt
- 大小:1.29 MB
- 文档页数:24
2 模糊集合与模糊关系2.1 经典集合的特征函数定义:经典集合的特征函数记为f A (x ),定义为1()0()A x A f x x A x A ∈⎧⎨∉∉⎩当当或 2.2模糊集合与隶属函数定义:论域U 上的模糊集合A 是用一个从U 到实区间[0,1]上的函数Αμ 来刻画的,Αμ 叫做模糊集合A 的隶属函数,函数值Αμ (x )代表元素x 对集合A 的隶属度。
定义(严格的):论域U 到实区间[0,1]的任一映射 Αμ:U →[0,1] ∀x ∈U ,x →Αμ (x ) 都确定U 上的一个模糊集合A ,Αμ 叫做A 的隶属函数,Αμ (x )叫做x 对A 的隶属度。
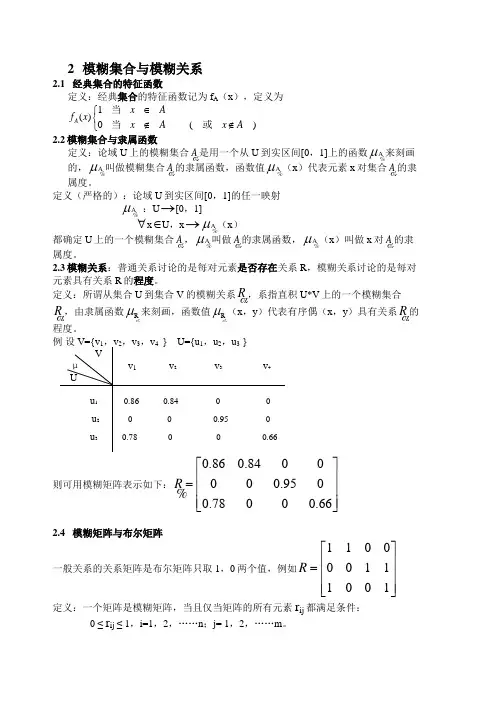
2.3模糊关系:普通关系讨论的是每对元素是否存在关系R ,模糊关系讨论的是每对元素具有关系R 的程度。
定义:所谓从集合U 到集合V 的模糊关系R ,系指直积U*V 上的一个模糊集合R ,由隶属函数R μ 来刻画,函数值R μ (x ,y )代表有序偶(x ,y )具有关系R 的程度。
例 设V={v 1,v 2,v 3,v 4 } U={u 1,u 2,u 3 }Vμ v 1 v 2 v 3 v 4Uu 1 0.86 0.84 0 0u 20 0 0.95 0u 3 0.78 0 0 0.66则可用模糊矩阵表示如下:0.860.8400000.9500.78000.66R ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦2.4 模糊矩阵与布尔矩阵一般关系的关系矩阵是布尔矩阵只取1,0两个值,例如110000111001R ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦定义:一个矩阵是模糊矩阵,当且仅当矩阵的所有元素r ij 都满足条件:0 ≤ r ij ≤ 1,i=1,2,……n ;j= 1,2,……m 。
特别的,当r ij 只取0和1两种数值时称为布尔矩阵。
2.5 模糊矩阵的运算2.5.1 相等:当且仅当两个模糊矩阵的一切元素两两相等时称两个模糊矩阵相等。
A =B 〈=〉 a ij =b ij i=1,2,……n ;j= 1,2,……m 。
第二章:模糊控制的理论基础第一节:引言模糊控制的发展传统控制方法:数学模型。
模糊控制逻辑:使计算机具有智能和活性的一种新颖的智能控制方法。
模糊控制以模糊集合论为数学基础。
模糊控制系统的应用对于那些测量数据不准确,要处理的数据量过大以致无法判断它们的兼容性以及一些复杂可变的被控对象等场合是有益的。
模糊控制器的设计依赖于操作者的经验。
模糊控制器参数或控制输出的调整是从过程函数的逻辑模型产生的规则来进行的。
改善模糊控制器性能的有效方法是优化模糊控制规则。
模糊控制的特点:一、无需知道被控对象的数学模型二、是一种反应人类智慧思维的智能控制三、易被人们所接受四、推理过程采用“不精确推理”五、构造容易六、存在的问题:1、要揭示模糊控制器的实质和工作原理,解决稳定性和鲁棒性理论问题,从理论分析和数学推导的角度揭示和证明模糊控制系统的鲁棒性优于传统控制策略;2、信息简单的模糊处理将导致系统的控制精度降低和动态品质变差;3、模糊控制的设计尚缺乏系统性,无法定义控制目标。
“模糊控制的定义”定义:模糊控制器的输出是通过观察过程的状态和一些如何控制过程的规则的推理得到的。
基于三个概念:测量信息的模糊化,推理机制,输出模糊集的精确化;测量信息的模糊化:实测物理量转换为在该语言变量相应论域内的不同语言值的模糊子集;推理机制:使用数据库和规则库,根据当前的系统状态信息决定模糊控制的输出子集;模糊集的精确化:将推理过程得到的模糊控制量转化为一个清晰,确定的输出控制量的过程。
“模糊控制技术的相关技术”模糊控制器的核心处理单元:1.传统单片机;2.模糊单片机处理芯片;3.可编程门阵列芯片。
模糊信息与精确转换技术:AD,DA,转换技术。
模糊控制的软技术:系统的仿真软件。
综述:模糊控制是一种更人性化的方法,用模糊逻辑处理和分析现实世界的问题,其结果往往更符合人的要求。
第二节:模糊集合论基础“模糊集合的概念”经典集合论所表达概念的内涵和外延都必须是明确的。