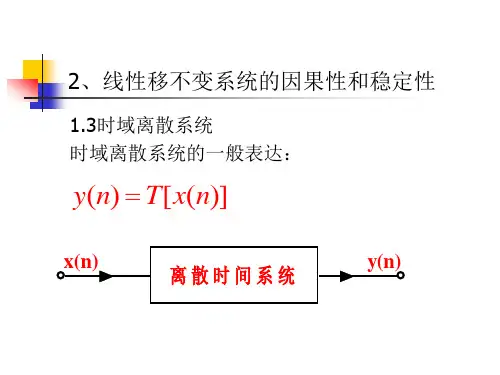
线性时变因果无源总结和例题
- 格式:ppt
- 大小:329.00 KB
- 文档页数:14
具有时变时滞的不确定线性广义系统的无源控制摘要:本文主要讨论具有时变时滞的不确定线性广义系统的无源控制问题。
文中的时变时滞不是一个常数而是具有最大值,且不确定参数都是范数有界的。
利用代数Riccati方程和线性矩阵不等式解决了在没有不确定参数情况下的时变时滞线性广义系统的无源控制问题。
关键词:无源控制时变时滞不确定广义系统线性矩阵不等式
1 引言
本文主要讨论状态具有时变时滞和含不确定参数的广义系统无源控制问题。
设计线性状态反馈控制器使得对于所有的时滞和参数允许的不确定性,系统是鲁棒稳定和无源的。
本文中的时滞不是一个常数,而是具有最大值,且不确定参数都是范数有界的。
首先,利用无源性定义和Lyapunov稳定性定理以及线性矩阵不等式,给出了时变时滞广义系统满足无源的条件,并且设计了状态反馈控制器,然后,利用代数Riccati方程得到了时变时滞不确定线性广义系统的无源控制器。
4 结语
本文讨论了具有时变时滞的不确定广义系统的无源控制问题。
通过不含不确定参数的时变时滞广义系统的无源性得到了含不确定参数的时变时滞广义系统的无源性,并以线性矩阵不等式的形式给出。
信号与系统复习总结题-一、判断题:说法正确的请在题后括号里打“√”,反之打“╳”。
1.级联LTI 系统总的单位冲激响应等于各个子系统单位冲激响应的乘积。
[ ]2.若函数波形沿时间轴平移半个周期并相对于该轴反折,波形不发生变化,则这样的函数称为奇谐函数。
[ ] 3. 周期信号的频谱是离散的,当周期趋于无穷大时,周期信号就变成非周期信号,傅里叶级数就演变成傅里叶变换,离散频谱也就过渡成连续频谱。
[ ] 4.对于一个因果的线性时不变系统,其系统函数的收敛域应位于S 平面最左边极点的整个右边区域。
[ ]5.如果离散LTI 系统的单位冲激响应满足当0k <时,()0h k =,那么该系统是因果系统。
[ ] 6.所有能量信号一定都是非周期信号,而非周期信号也一定都是能量信号。
[ ]7.如果连续LTI 系统的单位冲激响应满足+∞<⎰+∞∞-)(dt t h ,那么该系统是稳定系统。
[ ] 8. 不论是连续系统还是离散系统,其自由响应就是零输入响应,响应仅取决于系统的初始值,而与系统的输入无关。
[ ] 9.单位阶跃信号是单位冲激信号的积分,单位冲激信号是单位阶跃信号的微分分。
[ ] 10. 时域信号的时移只会对频谱密度函数的幅度谱有影响,对相位谱无影响。
[ ]11. 一个信号存在拉普拉斯变换就一定存在傅里叶变换,同样一个信号存在傅氏变换就一定存在拉氏变换。
[ ]12. 信号傅立叶变换的尺度变换特性表明:时域压缩对应频域扩展、时域扩展对应频域压缩。
[ ] 13.如果f (t)是实函数,其对应的傅立叶变换函数实部为偶函数,虚部为奇函数。
[ ]14.当一个系统的特征函数H (s ) 唯一确定以后,可以唯一的画出其信号流图。
[ ]15.序列f (k )ε(k )的收敛域一定是z 平面上某个圆的圆外部分;而序列f (k )ε(-k )的收敛域一定是z 平面上某个圆的的圆内部分。
[ ] 16. 卷积法可以求连续LTI 系统的零状态响应,傅立叶变换法可以求连续LTI 系统的零输入响应。
电网络理论考题总结(简答题)【1】N端口线性时变与非线性的电感元件、电容元件的定义,并举例。
线性时变电感:N端口元件满足关系,且为矩阵,与Ψ=L i(t)L(t)(N-1)×(N-1)磁链及电流无关。
线性时变电容:N端口元件满足关系,且为矩阵,与q=C v(t)C(t)(N-1)×(N-1)电荷及电压无关。
(电阻定义类似)☛☛☛一个不含时变元件的电路称为时不变电路,否则为时变电路。
若一个电容元件的库伏特性不是一条通过坐标原点的直线,该种电容就是非线性电容;电感的磁通链和电流间的函数关系为韦安特性,若电感元件的韦安特性不是一条过坐标原点的直线,则为非线性电感元件。
【2】N端口非线性电路的定义。
一是根据电路元件的特性来定义(含非线性元件即为非线性电路);二是根据输入输出关系来定义(端口型定义,网络输入输出关系不同时存在可加性和齐次性时即为端口型非线性网络)。
【3】高阶有源滤波器的设计步骤。
(根据相应实例写步骤)一般:高阶:给出设计指标,根据设计指标选择逼近函数;确定阶数、找到对应的无源网络模型;选择实现方法(级联、多路反馈、无源模拟等);参数退归一化;注意补偿、修正电路(直流通路)。
选取逼近函数类型;根据设计要求确定阶数;找到对应逼近函数的无源低通网络模型;选择实现方法(级联、多路反馈、无源模拟等);根据要求的滤波器类型进行变换(如仿真电感、F D N R、L F等);参数退归一化。
二阶:S a l l e n K e y---L P、H P、B P、高通、陷波或者双积分回路---K H NT T。
【4】高阶有源滤波器的分类。
按使用的器件:仿真电感、F D N R、C CⅡ、跨导电容、运放;按设计方法:级联法、多路反馈法、无源模拟法。
【5】高阶有源滤波器的设计方法,它们的共同点和特点。
❶级联法:级联滤波器易于调节和优化动态范围,但设计时各极、零点的搭配要慎重考虑,以实现较低灵敏度。

1.判断下列系统的线性、时不变性、因果性和记忆性。
(解析P7) ①()10()()dy t y t f t dt += ②()()(10)dy t y t f t dt+=+ ③2()()()dy t t y t f t dt+= ④2()(10)()y t f t f t =++2.判断下列系统的线性、时不变性和因果性。
(解析P7) ①20()()sin ()y t y t t at f t =+ ②()()()y t f t f t b =⋅-3.某系统,当输入为()tδτ-时,输出为()()(3)h t u t u t ττ=---,问该系统是否为因果系统?是否为时不变系统?说明理由。
4.下列信号属于功率信号的是(解析P6) ①cos ()tu t ②()teu t - ③()t te u t - ④te-5. 画出函数波形图:2()(1)f t u t =-(指导P12)6.已知()()2(1)(2)(2),f t tu t u t t u t =--+--画出()f t 波形。
(指导P13) 7.根据1.10图中(32)f t -+的波形,画出()f t 波形。
(指导P18) 8.已知()f t 波形波形如例1.11图所示,试画出1(2)2f t --的波形。
(指导P19) 9.已知(52)f t -的波形如图例1.12图所示,求()f t 波形。
(指导P20) 10.求下列函数值 ①432'(652)(1)t t t t dt δ∞+++-⎰②3'()te d τδττ--∞⎰ ③'2(9)t dt δ+∞-∞-⎰ (指导P24)11.求信号0.20.3()j n j n x n ee ππ-=+的周期。
(指导P36) 12.设()x t 是复指数信号:0()j tx t eΩ=,其角频率为0Ω,基本周期为02T π=Ω。
如果离散时间序列是通过对()x t 以取样间隔s T 进行均匀取样的结果,即00()()s j nT j n s x n x nT e e ωΩ===。
对模拟信号(一维信号,是时间的函数)进行采样后,就是 离散 信号,再进行幅度量化后就是 数字信号。
2、若线性时不变系统是有因果性,则该系统的单位取样响应序列h(n)应满足的充分必要条件是 当n<0时,h(n)=0 。
3、序列)(n x 的N 点DFT 是)(n x 的Z 变换在 单位圆 的N 点等间隔采样。
4、)()(5241n R x n R x ==,只有当循环卷积长度L ≥8 时,二者的循环卷积等于线性卷积。
5、已知系统的单位抽样响应为h(n),则系统稳定的充要条件是()n h n ∞=-∞<∞∑6、用来计算N =16点DFT ,直接计算需要(N 2)16*16=256_次复乘法,采用基2FFT 算法,需要__(N/2 )×log 2N =8×4=32 次复乘法。
7、无限长单位冲激响应(IIR )滤波器的基本结构有直接Ⅰ型,直接Ⅱ型,_级联型_和 并联型_四种。
8、IIR 系统的系统函数为)(z H ,分别用直接型,级联型,并联型结构实现,其中 并联型的运算速度最高。
9、数字信号处理的三种基本运算是:延时、乘法、加法 10、两个有限长序列和长度分别是和,在做线性卷积后结果长度是__N 1+N 2-1_。
11、N=2M点基2FFT ,共有 M 列蝶形,每列有N/2 个蝶形。
12、线性相位FIR 滤波器的零点分布特点是 互为倒数的共轭对 13、数字信号处理的三种基本运算是: 延时、乘法、加法14、在利用窗函数法设计FIR 滤波器时,窗函数的窗谱性能指标中最重要的是___过渡带宽___与__阻带最小衰减__。
16、_脉冲响应不变法_设计IIR 滤波器不会产生畸变。
17、用窗口法设计FIR 滤波器时影响滤波器幅频特性质量的主要原因是主瓣使数字滤波器存在过渡带,旁瓣使数字滤波器存在波动,减少阻带衰减。
18、单位脉冲响应分别为和的两线性系统相串联,其等效系统函数时域及频域表达式分别是h(n)=h 1(n)*h 2(n),=H 1(e j ω)×H 2(e j ω)。
判断系统线性,时变,因果方法
系统是指具有输入和输出的物理、化学或数学系统。
线性、时变和因果是描述系统特性的重要方法。
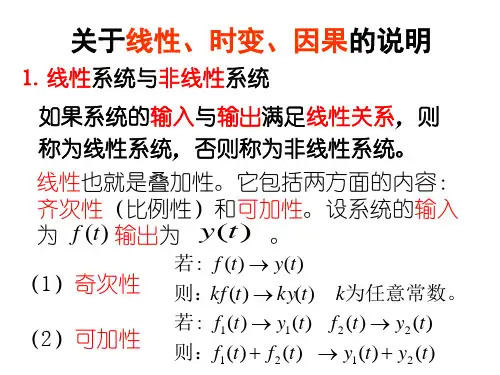
1.线性系统
线性系统具有以下特征:
(1)叠加性:改变系统输入信号时,系统输出信号的响应与每个输入信号的响应之和相同。
在数学表达中,线性系统遵循以下公式:
y(t) = k1 x1(t) + k2 x2(t)
其中,y(t)表示输出信号,x1(t)和x2(t)表示输入信号,k1和k2是常数。
2.时变系统
(1)系统的性质随时间而变化。
(2)系统的输入信号引起的输出信号是随时间变化的。
时变系统可以分为两类:瞬时时变系统和持久时变系统。
瞬时时变系统是指输出信号在一个短时期内变化。
它们通常是非线性系统,如开关机构、半导体器件等。
持久时变系统是指系统的输出随时间发生缓慢变化。
它们通常是线性系统,如电路、电子滤波器等。
3.因果系统
(1)因果关系:系统的输出信号仅依赖于系统输入信号的过去和现在状态。
(2)系统的输出信号在前后时刻滞后不超过系统输入信号。
也就是说,当某个输入信号改变时,该信号一定会导致一个相应的输出信号改变。
总之,对于分析系统的特性,线性、时变、因果方法是非常重要的。
它们有助于我们理解系统的性能和行为,并在设计和控制系统时做出正确的决策。
绪论:本章介绍数字信号处理课程的基本概念。
0.1信号、系统与信号处理1.信号及其分类信号是信息的载体,以某种函数的形式传递信息。
这个函数可以是时间域、频率域或其它域,但最基础的域是时域。
分类:周期信号/非周期信号确定信号/随机信号能量信号/功率信号连续时间信号/离散时间信号/数字信号按自变量与函数值的取值形式不同分类:2.系统系统定义为处理(或变换)信号的物理设备,或者说,凡是能将信号加以变换以达到人们要求的各种设备都称为系统。
3.信号处理信号处理即是用系统对信号进行某种加工。
包括:滤波、分析、变换、综合、压缩、估计、识别等等。
所谓“数字信号处理”,就是用数值计算的方法,完成对信号的处理。
0.2数字信号处理系统的基本组成数字信号处理就是用数值计算的方法对信号进行变换和处理。
不仅应用于数字化信号的处理,而且也可应用于模拟信号的处理。
以下讨论模拟信号数字化处理系统框图。
(1)前置滤波器将输入信号x a(t)中高于某一频率(称折叠频率,等于抽样频率的一半)的分量加以滤除。
(2)A/D变换器在A/D变换器中每隔T秒(抽样周期)取出一次x a(t)的幅度,抽样后的信号称为离散信号。
在A/D 变换器中的保持电路中进一步变换为若干位码。
(3)数字信号处理器(DSP)(4)D/A变换器按照预定要求,在处理器中将信号序列x(n)进行加工处理得到输出信号y(n)。
由一个二进制码流产生一个阶梯波形,是形成模拟信号的第一步。
(5)模拟滤波器把阶梯波形平滑成预期的模拟信号;以滤除掉不需要的高频分量,生成所需的模拟信号y a(t)。
0.3数字信号处理的特点(1)灵活性。
(2)高精度和高稳定性。
(3)便于大规模集成。
(4)对数字信号可以存储、运算、系统可以获得高性能指标。
0.4数字信号处理基本学科分支数字信号处理(DSP)一般有两层含义,一层是广义的理解,为数字信号处理技术——DigitalSignalProcessing,另一层是狭义的理解,为数字信号处理器——DigitalSignalProcessor。