理论力学振动试验(2015)
- 格式:docx
- 大小:134.55 KB
- 文档页数:7
实验一求振动系统的刚度系数和固有频率一、实验目的:1、了解并掌握一维振动系统的刚度系数的测定;2、求取振动系统的固有频率;3、了解考虑弹簧质量时,对振动周期的影响并进行等效质量的计算。
二、实验设备和仪器1、TME—1理论力学多功能实验装置;2、100g砝码1个,200g砝码2个;3、砝码托盘一个;三、实验原理弹簧质量组成的振动系统,在弹簧的线性变形范围内,系统的变形和所受到的外力的大小成线性关系。
据此,施加不同的力,得到不同的变形,可以得到系统的刚度系数。
四、实验方法和步骤1、将砝码托盘钩挂在“弹簧质量系统”的塑料质量模型上2、记录此时塑料质量模型上指针所在的初始位置;3、将100g的砝码放置于砝码托盘上,读取指针的位置并做记录;4、按100g的增量变换砝码,直到砝码重量达500g,并记录相应的指针位置;5、在坐标上画出系统变形与砝码重量之间的关系曲线;6、计算振动系统的刚度系数和固有频率。
五、数据记录与处理12、系统固有频率的计算六、注意事项1、实验前,应通过调节弹簧固定端的调节螺栓使系统的模型保持水平;2、读数时眼睛应平视,以尽量减小读数误差;七、思考题1、在考虑弹簧质量的情况下,系统的等效质量是否等于塑料模型的质量加四根弹簧的质量?2、试分析系统的误差。
实验二、测定“空中输电线”模型的振幅与风速关系曲线一、实验目的1、了解风激励对空中输电线产生的振动响应,认识共振的危害性;2、了解模型的抽象结果;3、测取“空中输电线”模型的振动幅值与风激励速度之间的关系曲线二、实验仪器和设备1、TME—1理论力学多功能实验装置;2、“空中输电线”模型;3、调压器1只;4、风速仪1台;5、光电转速表1只。
三、实验原理“空中输电线”可以抽象为由弹簧和质量块组成的系统模型。
在风激励下,该系统将产生振动。
激励频率与风速有关,而系统振幅又与激励频率有关。
在不同的风速下,系统的振动频率是不同的。
当激励频率接近系统的固有频率时,系统将产生共振。
实验二:简谐振动幅值测量一、实验目的1.了解振动信号位移、速度、加速度之间的关系。
2.学会用速度传感器测量简谐振动的位移、速度、加速度幅值。
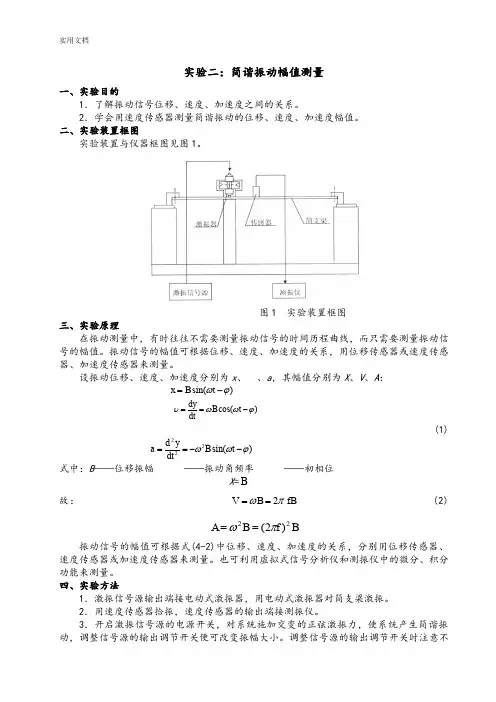
二、实验装置框图实验装置与仪器框图见图1。
图1 实验装置框图三、实验原理在振动测量中,有时往往不需要测量振动信号的时间历程曲线,而只需要测量振动信号的幅值。
振动信号的幅值可根据位移、速度、加速度的关系,用位移传感器或速度传感器、加速度传感器来测量。
设振动位移、速度、加速度分别为x 、、a ,其幅值分别为X 、V 、A : sin()x B t ωϕ=-cos()dy B t dtυωωϕ==-(1)222sin()d ya B t dtωωϕ==--式中:B ——位移振幅 ——振动角频率 ——初相位X =B故: 2V B fB ωπ== (2) B f B A 22)2(πω==振动信号的幅值可根据式(4-2)中位移、速度、加速度的关系,分别用位移传感器、速度传感器或加速度传感器来测量。
也可利用虚拟式信号分析仪和测振仪中的微分、积分功能来测量。
四、实验方法1.激振信号源输出端接电动式激振器,用电动式激振器对简支梁激振。
2.用速度传感器拾振,速度传感器的输出端接测振仪。
3.开启激振信号源的电源开关,对系统施加交变的正弦激振力,使系统产生简谐振动,调整信号源的输出调节开关便可改变振幅大小。
调整信号源的输出调节开关时注意不要过载。
4.分别用测振仪的位移X、速度V、加速度A各档进行测量和读数。
五、实验结果与分析1位移X (mm)23.根据速度V,按公式(2)计算位移X、加速度A。
4.根据加速度A,按公式(2)计算位移X、速度V。
5.位移、速度、加速度幅值的实测值与计算值有无差别?若有差别原因是什么?实验三:机械振动系统固有频率的测量一、实验目的1.了解共振前后李萨如图形的变化规律和特点。
2.学会用“共振相位判别法”测量机械振动系统的固有频率。
二、实验装置框图图1 实验装置框图 三、实验原理用简谐力激振,造成系统共振,以寻找系统的固有频率,是一种常用的方法。
大连理工大学盘锦校区大连理工大学理论力学振动实验手册海洋科学与技术学院目录DHVTC振动测试与控制教学实验系统介绍 (3)安全注意事项 (1)实验一、强迫振动幅值测定 (2)实验二、振动时域统计参数的测定 (5)实验三、振动系统固有频率的测定 (8)实验四、单自由度系统衰减振动固有频率及阻尼比测量 (10)实验五、主动隔振实验 (14)实验六、被动隔振实验 (17)实验七、动力吸振器吸振实验 (20)DHVTC振动测试与控制教学实验系统介绍DHVTC振动测试与控制教学实验系统是根据高等院校学生实验要求研发的,该系统力学模型合理,数据采集及分析功能高度集成,测试精度高,操作方便,特别适合高等院校力学系、机械系、精密仪器系、土木系及其他相关专业学生进行多种振动测试实验、减振实验和模态实验等多种实验。
系统组成:实验台架:底座、支座、简支梁、悬臂梁等等传感器:DH187IEPE加速度传感器(0.5Hz~10KHz);激振系统:力锤(0~5000N)、偏心电机(可通过调节电机转速控制激励的频率和幅值)测试系统:动态数据采集分析系统(DH5857-2电荷适调器一通道,DH5923-1数采两通道)、DHDAS实时控制与基本分析软件、DHMA实验模态分析软件。
安全注意事项本实验系统尽管在设计、加工和安装时已充分考虑了安全方面的问题,但强烈建议用户使用时注意如下事项:一、通电前仔细检查各活动机械部分,如激振器、偏心电机等的连接紧固情况,确保所有螺栓、卡扣等紧固无误,避免激振或旋转。
二、查看传感器、信号源、激振器等连线正确无误,确保各仪器正常工作。
三、检查各仪器电源线是否插紧插好,各仪器是否可靠接地,以防触电。
四、调压器应放置于桌面宽敞处,尽可能远离其它仪器,并且在使用时只有经检查无误后才能通电,通电前须仔细检查电机偏心轮是否紧固、调压器与电机连线、接地是否可靠,使用完毕应立即断电。
五、激振器和偏心电机工作时,禁止手或是其它物品碰到激振器顶杆和电机偏心轮,以免受伤或物品飞落。
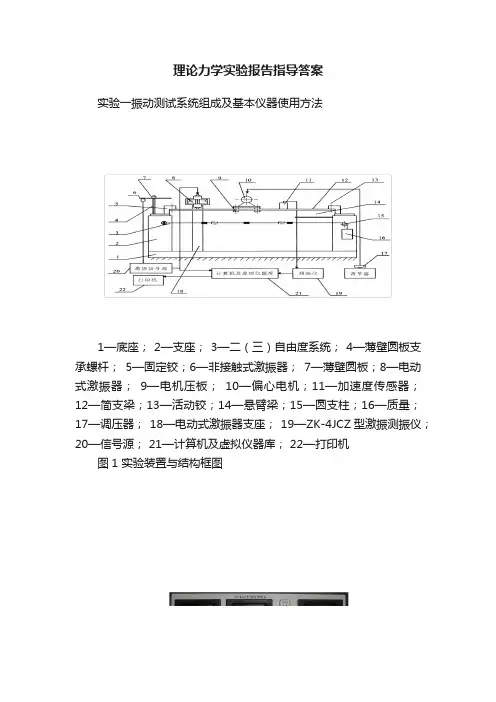
理论力学实验报告指导答案实验一振动测试系统组成及基本仪器使用方法1—底座; 2—支座; 3—二(三)自由度系统; 4—薄壁圆板支承螺杆;5—固定铰;6—非接触式激振器;7—薄壁圆板;8—电动式激振器;9—电机压板;10—偏心电机;11—加速度传感器;12—简支梁;13—活动铰;14—悬臂梁;15—圆支柱;16—质量;17—调压器; 18—电动式激振器支座; 19—ZK-4JCZ型激振测振仪;20—信号源; 21—计算机及虚拟仪器库; 22—打印机图1 实验装置与结构框图传感器1输入传感器2输入一道振动幅值二道振动幅值频率/功率显示值频率,周期,灵敏度调节一道,二道增益及测试方式状态设置选择及参数选择旋扫频选择方式选择灵敏度选择显示选择功率输出选择功率幅度调节信号源调节功率输出B 道功率输出A 道信号源波形输出ZK —4JCZ 型激振测振仪功能分布图ZK-4JCZ 型激振测振仪是一种多功能测量仪器。
它包括信号源、功率放大器及两个配接加速度计的测量通道,可对振动的加速度、加速度或位移进行测量。
实验二简谐振动幅值测量一、实验目的1. 了解振动信号位移、速度、加速度的关系。
2. 学会用压电式加速度传感器测量简谐振动的位移、速度、加速度幅度。
二、实验装置与仪器框图实验装置与仪器框图见图(1)图(1)实验装置与仪器框图四、实验方法1. 激振信号源输出端接电动式激振器,用电动式激振器对简支梁激振。
2. 用加速度传感器拾振,加速度传感器的输出接测振仪。
3. 开启激振信号源的电源开关,对系统施加交变正弦激振力,使系统产生振动,调整信号源的输出调节开关便可改变振幅大小。
调整信号源的输出调节开关时注意不要过载。
4. 分别用测振仪的位移X、速度V、加速度A各档进行测量和读数。
五、实验报告1. 实验数据表12. 根据位移X,按公式(2)计算速度V、加速度A。
3. 根据速度V,按公式(2)计算位移X、加速度A。
4. 根据加速度A,按公式(2)计算位移X、速度V。

理论力学中的振动现象理论分析振动是物体在某一参考点附近周期性地往复运动的现象。
在理论力学中,振动现象是一种重要的研究对象,对于理解物体的运动规律和解决实际问题具有重要意义。
本文将从理论力学的角度,对振动现象进行理论分析。
一、振动的基本概念和特征振动是物体在某一平衡位置附近往复运动的现象。
振动的基本特征包括周期性、往复性和谐波性。
周期性意味着振动现象具有一定的周期,即在一定时间内重复发生;往复性指物体在振动过程中来回运动;谐波性表示振动的运动规律可以用正弦或余弦函数来描述。
二、单自由度振动的理论分析单自由度振动是指物体在一个自由度上进行振动,常见的例子包括弹簧振子和简谐振子。
弹簧振子是通过弹簧连接的质点在重力作用下进行振动,而简谐振子是指受到恢复力作用的质点进行的振动。
对于单自由度振动,可以通过运动方程和力学原理进行理论分析。
运动方程可以通过牛顿第二定律得到,即质点的加速度与作用力之间的关系。
对于弹簧振子和简谐振子,运动方程可以表示为mx'' + kx = 0,其中m是质点的质量,x是质点的位移,k是恢复力的劲度系数。
通过求解运动方程,可以得到振动的解析解。
对于弹簧振子和简谐振子,解析解可以表示为x = Acos(ωt + φ),其中A是振幅,ω是角频率,t是时间,φ是初相位。
解析解可以描述振动的幅度、频率和相位等特征。
三、多自由度振动的理论分析多自由度振动是指物体在多个自由度上进行振动,常见的例子包括双摆和弦上的驻波。
对于多自由度振动,可以通过运动方程和线性代数的方法进行理论分析。
对于双摆,可以通过运动方程得到两个摆角的运动方程,然后通过线性代数的方法求解。
通过求解本征值和本征向量,可以得到双摆的固有频率和振型。
固有频率表示双摆的振动频率,振型表示双摆的形状和运动规律。
对于弦上的驻波,可以通过波动方程和边界条件进行理论分析。
波动方程可以描述弦上的波动现象,边界条件可以表示弦的两端的约束条件。
(1)实验二:简谐振动幅值测量、实验目的1. 了解振动信号位移、速度、加速度之间的关系。
2•学会用速度传感器测量简谐振动的位移、速度、加速度幅值。
、实验装置框图 实验装置与仪器框图见图1。
图1实验装置框图三、实验原理在振动测量中,有时往往不需要测量振动信号的时间历程曲线,而只需要测量振动信 号的幅值。
振动信号的幅值可根据位移、速度、加速度的关系,用位移传感器或速度传感 器、加速度传感器来测量。
设振动位移、速度、加速度分别为 x 、u 、a ,其幅值分别为X 、V 、A :x= Bsi A® )■-二矽二 Bco s (t -:)dtd 2ya = ― - - 2Bs i n (t _ :)dt 2式中:B ——位移振幅 ----------- 振动角频率:——初相位X=B 故:V = • B = 2 二 fBA = 2B =(2 二 f)2B振动信号的幅值可根据式(4-2)中位移、速度、加速度的关系,分别用位移传感器、 度传感器或加速度传感器来测量。
也可利用虚拟式信号分析仪和测振仪中的微分、积分功 能来测量。
四、实验方法1. 激振信号源输出端接电动式激振器,用电动式激振器对简支梁激振。
2. 用速度传感器拾振,速度传感器的输出端接测振仪。
3. 开启激振信号源的电源开关,对系统施加交变的正弦激振力,使系统产生简谐振 动,调整信号源的输出调节开关便可改变振幅大小。
调整信号源的输出调节开关时注意不 要过载。
4•分别用测振仪的位移X、速度V、加速度A各档进行测量和读数五、实验结果与分析1 •实验数据表2- 12•根据位移X,按公式⑵计算速度V、加速度A。
3•根据速度V,按公式⑵计算位移X、加速度A o4•根据加速度A,按公式(2)计算位移X、速度V o5•位移、速度、加速度幅值的实测值与计算值有无差别?若有差别原因是什么?11 ---------------------h辟1图1 实验装置框图d2ydt2实验三:机械振动系统固有频率的测量、实验目的1•了解共振前后李萨如图形的变化规律和特点。
2•学会用“共振相位判别法”测量机械振动系统的固有频率、实验装置框图三、实验原理用简谐力激振,造成系统共振,以寻找系统的固有频率,是一种常用的方法。
这种方法可以根据振动量的幅值共振来判定共振频率。
但在阻尼较大的情况下,用不同的幅值共振方法测得的共振频率略有差别,而且用幅值变化来判定共振频率有时不够敏感。
相位判别法是根据共振时的特殊相位值以及共振前后的相位变化规律所提出来的一种共振判别法。
在简谐力激振的情况下,用相位法来判定共振是一种较为敏感的方法,而且共振时的频率就是系统的无阻尼固有频率,可以排除阻尼因素的影响。
以下对这两种方法分别加以说明:1•位移判别共振设激振信号为F,振动体位移、速度、加速度信号为Y、dy、dtF 二FoSin td乙v—/ m2Bsin (t -)dt2测量位移拾振时,测振仪一上所反映的是振动体的位移信号。
将位移信号输入虚拟式示波的“ 丫通道,激振信号输入“ X”通道,此时两信号分别为:丫= y =Bsin( t -)将示波揣置于“ X-Y”显示档位上,以上两信号在屏幕上显示出一个椭圆图像。
共振时,「二二「二二2即X轴信号与丫轴信号的相位差为二2 ,根据李萨如图形原理知,虐抓仪黔打印机激霍h訐:源幕上的图像将是一个正椭圆。
当••略大于•・n 或略小于5时,图像都将由正椭圆变为斜椭圆其变化过程哪图2所示。
由图2见,图像由斜椭圆变为正椭圆时的频率就是振动体的固有频率。
;.「;.-;:n •=・n >'"'n欠共振共振过共振图2用位移判别共振的李萨如图形2•速度判别共振测量速度时,测振仪所反映的是振动体的速度信号。
将速度信号输入示波器丫轴,激振信号输入示波器X轴,此时,示波器的X轴与丫轴的信号分别为:X = F = F0sin •,t丫二包二Bcos(t-:「)= Bsin(t ) ⑵dt 2上述信号使示波器的屏幕上显示一椭圆图像。
共振时,—-n^二.2,因此,X轴信号与丫轴信号的信号相位差为0。
根据李萨如图形原理知,屏幕上的图像应是一条直线。
当」略大于•・n或略小于• F时,图像都将由直线变为椭圆。
其变化过程如图3所示。
因此,图像由椭圆变为直线时的频率就是振动体的固有频率图3用速度判别共振的李萨如图形3•加速度判别共振测量加速度时,测振仪上所反映的是振动体的加速度信号。
将振动加速度信号输入示波器丫轴,激振信号输入示波器x轴,此时,示波器的X轴与丫轴的信号分别为:X ― F — F o sin •. .•t2Y 二雪--2Bsin (t -)- 2Bsin (t ■- ) (3)dt上述信号使示波器的屏幕上显示一椭圆图像。
共振时,2, X轴信号与丫轴信号的信号相位差为二2,。
根据李萨如图形原理,屏幕上的图像将是一个正椭圆。
当「略大于或略小于行时,图像都将由正椭圆变为斜椭圆,并且其轴所在象限也将发生变化- J.-:n欠共振共振过共振其变化过程如图4所示。
因此图像变为正椭圆时的频率就是振动体的固有频率用加速度判别共振的李萨如图形四、实验方法1激振信号源输出端接电动式激振器,用激振器对简支梁激振。
2•将激振信号源输出端接入虚拟式示波器的X轴,速度传感器输出的信号经测振仪接入示波器的丫轴。
3•开启激振信号源的电源开关,对系统施加交变正弦激振力,使系统产生振动,调整信号源的输出调节开关便可改变振幅大小。
调整信号源的输出调节开关时注意不要过载。
4•激振频率由低到高逐渐增加,同时,用测振仪的X、V、A档测振,观察示波器屏幕上的图像,根据“共振相位判别法”的原理,分别用位移、速度、加速度、判别共振,确定共振频率。
五、实验结果与分析1将用X、V、A档判别共振的结果图分别绘出来。
2 •分析实验结果与理论原理是否相符合。
;.■?- :;F.n-=-n 门,门n共振过共振图1实验装置框图三、实验原理单自由度系统的力学模型如图2所示。
在正弦激振力的作用下系统作简谐强迫振动, 设激振力F 的幅值B 、圆频率■ 0 (频率f = • 2二),系统的运动微分方程式为:d 2xdx害Kx =F dt 2dtd 2x dt 2dx 2 2n2x 二 F Mdt与2空,F Mdt 2 dt式中:——系统固有圆频率•2= K Mn ――阻尼系数 ――阻尼比 2n =C. MF ――激振力方程(1)的特解,即强迫振动为:x = Asi n (° - J = As i n2「:f - JF = Bsi n pt = Bs i n^~ft)⑵式中:A ——强迫振动振幅;:——初相位B M-~2 r~2 ~2~2 (■ -■ °) 4n °实验四:单自由度系统强迫振动的幅频特性、固有频率和阻尼的测量.实验目的1. 学会测量单自由度系统强迫振动的幅频特性曲线。
2. 学会根据幅频特性曲线确定系统的固有频率 f °和阻尼比。
.实验装置框图图2单自由度系统力学模型图3单自由度系统振动的幅频特性曲线振幅为A max 时的频率叫共振频率f a 。
在有阻尼的情况下,共振频率为: 式⑶叫做系统的幅频特性。
将式 ⑶所表示的振动幅值与激振频率的关系用图形表示, 称为幅频特性曲线(如图3所示):图3中,A max 为系统共振时的振幅;f 。
为系统固有频率,f l , f 2为半功率点频率当阻尼较小时,f a :、f 。
故以固有频率f 0作为共振频率f a 。
在小阻尼情况下可得=⑸2f of l , f 2的确定如图3所示:四、实验方法1 •将速度传感器置于简支梁上,其输出端接测振仪,用以测量简支梁的振动幅值。
2•将电动式激振器接入激振信号源输出端,开启缴振信号源的电源开关,对简支梁 系统施加交变正弦激振力,使系统产生正弦振动。
3. 调整激振信号源输出信号的频率,并从测振仪上读出各频率及其对应的幅值,填 入表4— 1。
4. 利用虚拟式示波器找出 A max 值,然后用虚拟式FFT 分析仪作该幅值信号的频谱, 求出共振频率f a ,这里f a = f o 从而求出系统固有频率。
5. 求出幅值0.707A max ,然后FFT 分析仪的频谱中作出A=0.707A max ,找到与频谱图相 交的两个点的频率f l 和f 2,从而可用式 ⑸求出阻尼比量。
五、实验结果分析 1 .实验数据 表1频率(HZ )1 20 2326293235384144475053振幅(Mm )3. 确定系统固有频率f o (幅频特性曲线共振峰的亡最高点对应的频率近似等于系统固 有频率)。
4. 确定阻尼比•。
按图3所示计算0.707A max ,然后在幅值特性曲线上确定f 1, f 2,利 用式(5)计算出阻尼比。