4.1机器人运动学的数学基础
- 格式:pptx
- 大小:424.73 KB
- 文档页数:14
机器人运动学建模技术的工作原理机器人运动学建模技术为机器人的运动控制提供了基础,它是机器人技术中的一个重要组成部分。
机器人运动学建模技术主要利用数学方法和计算机软件对机器人系统进行建模和分析,从而优化机器人的运动控制。
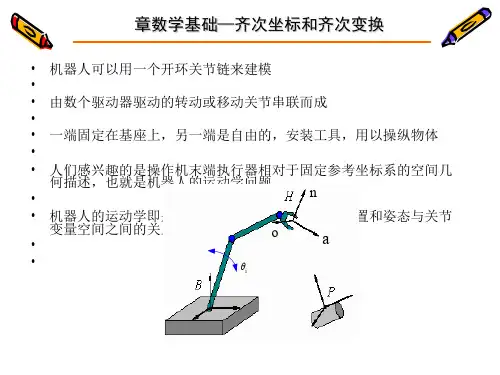
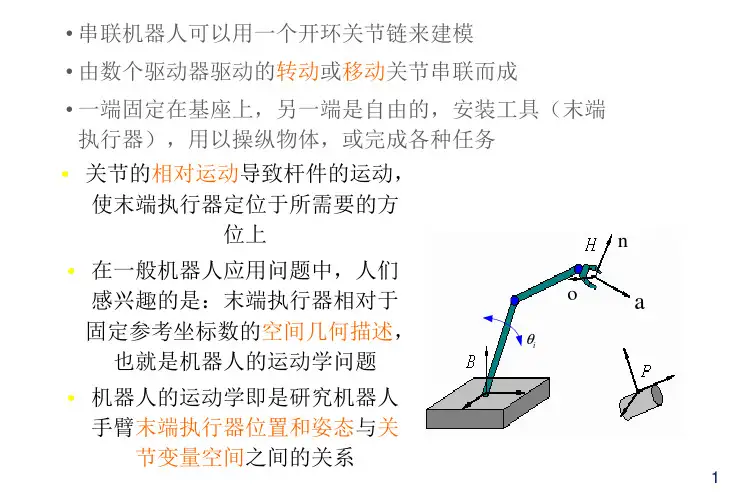
一、机器人运动学基础机器人运动学是研究机器人运动规律和控制的一门学科,它主要包括前向运动学和逆向运动学两部分。
前向运动学是指已知机器人各关节的角度或位置,求出机器人末端执行器的位置和姿态;逆向运动学是指已知机器人末端执行器的位置和姿态,求出各个关节的角度或位置。
机器人运动学基础理论是机器人运动学建模技术的基础。
二、机器人运动学建模方法机器人运动学建模方法主要有基于DH方法的运动链式模型、基于坐标变换的运动学模型、基于位移向量法的运动学模型等。
1. 基于DH方法的运动链式模型DH方法是一种对机器人进行建模的方法,它可以将机器人运动链建立起来,并对每个关节的运动方向、长度和角度进行描述。
采用DH方法将机器人建模,可以有效地简化机器人的运动学分析,为机器人控制系统的设计提供了便利。
DH方法的建模步骤主要包括:(1)确定机器人的坐标系,建立虚拟的世界坐标系和机器人坐标系。
(2)确定机器人各关节的运动轴线,按照DH表示法,规定机器人关节的自由度和约束等条件。
(3)建立机器人的运动链,确定机器人各个部分间的运动关系,并计算出相应的转移矩阵。
通过建立DH方法的运动链模型,可以对机器人进行运动学分析,从而实现机器人的优化运动控制和精确位置控制。
2. 基于坐标变换的运动学模型坐标变换方法是一种常用的机器人建模方法,它可以对机器人的运动轨迹和姿态进行描述,并规定了机器人坐标系的变换规律。
坐标变换方法将机器人建模为一系列坐标系的变换,通过坐标系的变换,可以精确地描述机器人的运动轨迹和姿态。
(1)确定机器人的起始坐标系和目标坐标系,这些坐标系对应机器人的关节和工具末端。
(2)对机器人的各个部分和运动轨迹进行坐标系的变换,得到机器人的运动关系和姿态变化。
![第2章 机器人运动学—数学基础[可打印版,含习题]](https://uimg.taocdn.com/c5aed3c4a1c7aa00b52acbd8.webp)
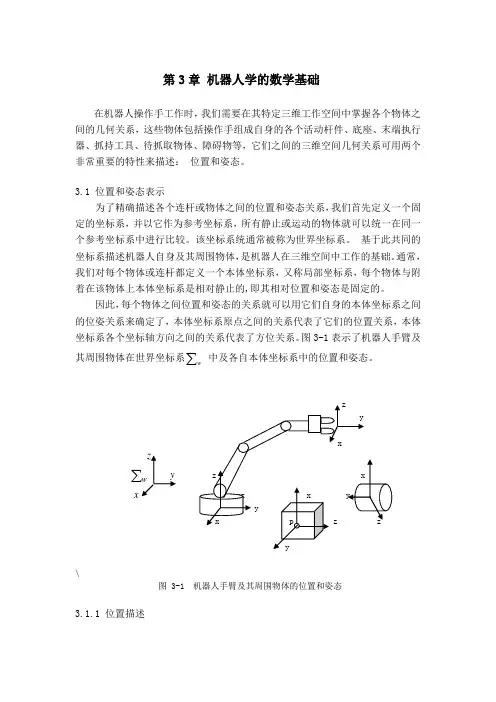
第3章机器人学的数学基础在机器人操作手工作时,我们需要在其特定三维工作空间中掌握各个物体之间的几何关系,这些物体包括操作手组成自身的各个活动杆件、底座、末端执行器、抓持工具、待抓取物体、障碍物等,它们之间的三维空间几何关系可用两个非常重要的特性来描述:位置和姿态。
3.1 位置和姿态表示为了精确描述各个连杆或物体之间的位置和姿态关系,我们首先定义一个固定的坐标系,并以它作为参考坐标系,所有静止或运动的物体就可以统一在同一个参考坐标系中进行比较。
该坐标系统通常被称为世界坐标系。
基于此共同的坐标系描述机器人自身及其周围物体,是机器人在三维空间中工作的基础。
通常,我们对每个物体或连杆都定义一个本体坐标系,又称局部坐标系,每个物体与附着在该物体上本体坐标系是相对静止的,即其相对位置和姿态是固定的。
因此,每个物体之间位置和姿态的关系就可以用它们自身的本体坐标系之间的位姿关系来确定了,本体坐标系原点之间的关系代表了它们的位置关系,本体坐标系各个坐标轴方向之间的关系代表了方位关系。
图3-1表示了机器人手臂及其周围物体在世界坐标系∑w中及各自本体坐标系中的位置和姿态。
zyxz∑W y z xx zzzzzz x yyx p z zy\图 3-1 机器人手臂及其周围物体的位置和姿态3.1.1 位置描述建立坐标系之后,三维空间中的任何一点都可以用一个具有三个分量的位置矢量来进行定位。
例如, 图3-1中立方体的质心p 在世界坐标系中的表示是:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=wz wy wx w p p p p下标w 代表了世界坐标系,因为位置矢量p 在不同坐标系中数值表示不同。
以上就是典型的基于笛卡尔坐标系的三维空间位置矢量的描述方法。
当采用不同的坐标系表示时,会有不同的位置描述方法。
例如 基于圆柱坐标系的空间矢量表示方法,基于球坐标系的空间矢量表示方法等。
3.1.2 方位描述机器人手臂工作时,不但要考虑所抓取的物体的质心的位置,还要考虑空间中该物体的姿态,既方位。
机器人运动学基础机器人运动学是机器人学科中的一个重要分支,它研究机器人的运动规律和运动控制方法,是机器人技术的基础。
在机器人运动学中,我们主要研究机器人的运动学模型、坐标系、运动规律以及机器人的运动控制方法等问题。
机器人运动学模型机器人运动学模型是机器人运动学中最基础的概念之一。
机器人运动学模型是指通过数学方法描述机器人在三维空间中运动的数学模型。
在机器人运动学模型中,我们通常采用笛卡尔坐标系和关节坐标系来描述机器人的运动状态。
笛卡尔坐标系是直角坐标系的一种,它是三维空间中的一个坐标系,可以用来描述机器人的位置和姿态。
在机器人运动学中,我们通常采用笛卡尔坐标系来描述机器人的末端执行器的位姿。
关节坐标系是机器人的关节所在点构成的坐标系,它用来描述机器人的关节状态。
在机器人运动学中,我们通常采用关节坐标系来描述机器人的运动状态。
机器人运动规律机器人的运动规律是机器人运动学中的另一个重要概念。
机器人的运动规律是指机器人在运动过程中遵循的数学规律和运动轨迹。
机器人的运动规律可以用运动学方程来描述,其中最常用的是正运动学方程和逆运动学方程。
正运动学方程是指通过机器人的各个关节的运动状态来求解机器人的末端执行器的位姿的方程。
逆运动学方程是指通过机器人的末端执行器的位姿来求解机器人各个关节的运动状态的方程。
机器人运动控制方法机器人运动控制方法是机器人运动学中的另一个重要内容。
机器人运动控制方法是指通过控制机器人的运动状态和运动规律来实现机器人的运动目标。
机器人运动控制方法可以分为开环控制和闭环控制两种。
开环控制是指通过预先设定的控制信号来控制机器人的运动状态和运动规律。
开环控制的优点是简单、易于实现,但是其控制精度较低。
闭环控制是指通过机器人的传感器来反馈机器人的运动状态,并根据反馈信息来调节控制信号来实现机器人的运动目标。
闭环控制的优点是控制精度较高,但是其实现难度较大。
总结机器人运动学是机器人学科中的一个重要分支,它研究机器人的运动规律和运动控制方法,为机器人技术的发展提供了基础。