SCARA机器人的运动学分析
- 格式:docx
- 大小:55.55 KB
- 文档页数:6
Scara四轴轨迹算法是一种用于计算机器人手臂关节角度的方法,可以用于实现机器人的路径规划和运动控制。
Scara四轴轨迹算法的基本思想是将机器人的关节角度表示为时间的函数,通过给定的起始关节角度、目标关节角度和运动时间,计算出机器人手臂在运动过程中的每一个关节角度。
具体来说,Scara四轴轨迹算法可以通过以下步骤实现:
1. 设定起始关节角度(q1_start)、目标关节角度(q1_goal)和运动时间(t)。
2. 设定机器人的臂长(L1和L2)和高度偏移(D)等参数。
3. 根据Scara四轴轨迹公式,计算出机器人手臂在运动过程中的每一个关节角度。
4. 控制机器人按照计算出的关节角度进行运动,实现机器人的路径规划和运动控制。
需要注意的是,Scara四轴轨迹算法是一种基于物理模型的轨迹规划方法,其计算结果受到机器人物理性能和运动环境等因素的影响。
因此,在实际应用中,需要结合机器人的实际性能和环境条件进行调整和优化。
scara工业机器人课程设计一、课程目标知识目标:1. 学生能够理解SCARA工业机器人的基本结构、原理及功能。
2. 学生能够掌握SCARA工业机器人的运动学及动力学相关知识。
3. 学生能够了解SCARA工业机器人在工业生产中的应用及发展趋势。
技能目标:1. 学生能够运用CAD软件绘制SCARA工业机器人的三维模型。
2. 学生能够编写简单的程序,实现对SCARA工业机器人的控制。
3. 学生能够运用相关工具和仪器对SCARA工业机器人进行调试和维护。
情感态度价值观目标:1. 培养学生对工业机器人技术的兴趣,激发学生的创新精神和探索欲望。
2. 增强学生的团队合作意识,培养学生在团队中沟通、协作的能力。
3. 提高学生对我国工业机器人产业的认知,培养学生的国家荣誉感和使命感。
课程性质:本课程为实践性较强的学科课程,结合理论教学和实际操作,培养学生的动手能力和实际应用能力。
学生特点:高二年级学生对工业机器人有一定的基础知识,具备一定的自主学习能力和动手操作能力。
教学要求:教师需注重理论与实践相结合,充分调动学生的主观能动性,提高学生的实际操作技能和创新能力。
通过课程学习,使学生达到预定的学习成果,为我国工业机器人产业发展储备优秀人才。
二、教学内容1. SCARA工业机器人的基本结构及原理- 机器人概述、分类及发展历程- SCARA工业机器人的结构组成、工作原理2. SCARA工业机器人的运动学及动力学- 运动学分析:正运动学、逆运动学- 动力学分析:静力学、动力学建模3. SCARA工业机器人的编程与控制- 编程基础:编程语言、编程方法- 控制系统:硬件组成、软件实现4. SCARA工业机器人的应用及发展趋势- 工业应用场景:搬运、装配、焊接等- 发展趋势:智能化、网络化、协同化5. 实践操作- CAD软件绘制SCARA工业机器人三维模型- 编写程序,实现SCARA工业机器人的基本控制- 调试与维护:故障排查、性能优化教学内容安排和进度:第一周:介绍工业机器人概述、分类及发展历程,学习SCARA工业机器人的基本结构及原理第二周:学习SCARA工业机器人的运动学及动力学知识第三周:学习SCARA工业机器人的编程与控制方法第四周:了解SCARA工业机器人的应用及发展趋势,进行实践操作教材章节关联:《工业机器人技术》第三章:工业机器人运动学及动力学第四章:工业机器人编程与控制第五章:工业机器人应用及发展趋势三、教学方法本课程将采用以下多样化的教学方法,以激发学生的学习兴趣和主动性:1. 讲授法:- 用于讲解SCARA工业机器人的基本概念、原理、运动学及动力学知识。

scara机器人工作原理Scara机器人是一种常见的工业机器人,其工作原理是通过运动控制系统控制其机械臂的运动,以完成各种任务。
Scara机器人的机械臂通常由多个关节组成,每个关节都可以通过电机、编码器、减速器等装置来控制其运动。
机械臂的各个部件通过连杆连接,在关节处进行旋转运动,并通过关节间的连杆来传递力量。
机械臂的末端通常安装有工具或末端执行器,用于完成具体的任务,如组装、搬运、焊接等。
Scara机器人的运动控制系统主要包括传感器、控制器和执行器。
传感器用于感知环境和机器人自身状态的变化,例如光电传感器、力传感器、视觉传感器等。
控制器是机器人的大脑,通过收集传感器信息、处理算法和控制指令,来实现对机器人的精准控制。
执行器根据控制器的指令,控制机械臂的运动,以实现各种任务。
Scara机器人的运动控制通常遵循几个基本原则,包括运动规划、路径插补、运动控制和优化算法等。
运动规划是指在给定任务的条件下,根据机器人的动力学和几何学模型,确定机械臂的运动轨迹和关节角度。
路径插补是指在确定了运动轨迹后,根据机器人的运动特性,在轨迹上插入合适的点,使机器人能够平稳地运动。
运动控制是指对机械臂的运动进行实时控制,保证机器人按照预定轨迹和速度进行运动。
优化算法是指通过对机器人系统的建模和参数调整,来达到最佳的性能指标,如运动速度、精度、稳定性等。
Scara机器人的工作过程通常包括以下几个步骤:首先,通过传感器获取环境和机器人自身状态的信息;然后,根据任务要求和环境要素,确定机器人的运动路径和关节角度;接下来,进行路径插补和运动控制,使机械臂能够按照预定轨迹和速度平稳地运动;最后,通过执行器控制机械臂完成具体的工作任务。
Scara机器人具有许多优点,例如精度高、重复性好、速度快、可编程性强等。
它在汽车制造、电子组装、食品加工等领域广泛应用,能够提高生产效率和质量,减少人工劳动强度和生产成本。
总之,Scara机器人通过运动控制系统实现对机械臂的精准控制,以完成各种工作任务。

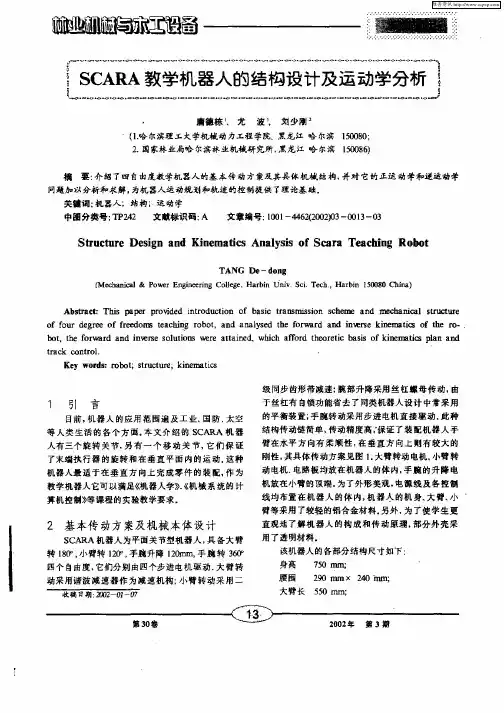
SCARA机器人装配及结构设计摘要Scara 机器人是一种由三个自由度组成的平面关节型机器人,它的主要作用是可以完成精密仪器和物体的搬运和移动。
由于体积小,传动原理简单,被广泛运用于电子电气业,家用电器业,精密机械业等领域。
整个系统由机器手,机器臂,关节,步进电机驱动系统等组成。
通过各自由度步进电机的驱动,完成机器手,机器臂的位置变化。
具体设计内容为:同步齿形带传动设计,丝杠螺母设计,各输出轴和壳体的设计,步进电机的选择等。
在校核满足其结构强度的基础上,我们对scara 机器人的结构进行优化设计。
本论文着重研究scara 机器人的结构设计和运动学分析。
在论文开始首先介绍了机器人的发展及其分类情况。
在论文第二,三章具体叙述了scara 机器人的结构设计和运动学分析的详细过程。
在论文末尾还对scara 机器人进一步改进措施和应用展望进行了阐述。
关键词:scara 机器人,步进电机,结构设计,机器臂Structure Design of SCARA Assembly ManipulatorAbstractA SCARA robot is a robot of plane and joint composed of three degrees of freedo m. Its mostly function is used to complete transition and motion of exact apparatus es and objects. Because of its small volume and simple drive principle, it is widely used in the field of electronic and electric industry, home-used electric-ware indust ry and exact mechanism. The whole system is composed of manipulator hand, ma nipulator arm, joints and stepper motor driving system. By stepper motor’s driving o f each degree of freedom, it completes location change of manipulator hand and m anipulator arm. The idiographic designing content is designing of in-phase tooth-sha pe strap, designing of silk-bar nut, designing of shell and axis and the choice of st epper motors. On the base of checking its structure intensity, while it satisfied, we optimize designing of the structure of SCARA robots.This paper put its emphases on research of its structure designing and kinematics analysis. At the beginning of this paper, it introduces the development and sort of r obots. In the second and third chapter, it introduces detailed detail among the proc essing of the structure designing of a SCARA robot and its kinematics analysis. At the last, this paper gives some measures about improving of SCARA robots, and gives a expectation about its future.Key Words: SCARA robots, stepper motor, structure design, manipulator arm目录Abstract ii第一章绪论 11.1 机器人的特点 11.2 机器人的构成及分类 11.2.1 机器人的构成 11.2.2 机器人的分类 31.3 机器人的应用与发展 41.3.1 机器人的应用 41.4SCARA机器人的研究意义 61.4.1SCARA机器人的研究意义 61.4.2SCARA机器人的特点71.5本文的研究内容8第二章SCARA机器人结构设计92.1 SCARA机器人传动方案的比较及确定9 2.2 各自由度步进电机的选择112.2.1 第一自由度步进电机的选择122.2.2 第二自由度步进电机的选择: 122.2.3 第三自由度步进电机的选择132.3 同步齿形带传动设计142.4 丝杠螺母设计182.4.1 丝杠耐磨性计算182.4.2 丝杠稳定性计算192.4.3 丝杠刚度计算192.4.4 丝杠和螺母螺纹牙强度计算202.4.5 螺纹副自锁条件校核212.5各输出轴的设计212.5.1 机身输出轴设计212.5.2 大臂输出轴设计222.5.3 带轮轴设计: 222.5.4 升降轴设计222.6壳体设计23第三章SCARA机器人运动学分析253.1 引言253.2SCARA机器人正运动学分析253.2.1SCARA机器人连杆坐标系的建立25 3.2.2SCARA机器人正运动学问题273.3 SCARA机器人逆运动学分析293.4 本章小结31第四章总结与展望32参考文献33致谢341.1 机器人的特点机器人最显著的特点有以下几个:1.可编程。
scara机器人状态空间表达式Scara机器人状态空间表达式Scara机器人是一种常见的工业机器人,其具有复杂的运动和控制系统。
为了描述和控制Scara机器人的运动状态,可以使用状态空间模型来表达。
状态空间模型是一种数学模型,用于描述系统的状态和状态之间的转移。
对于Scara机器人来说,可以将其状态空间表示为一个多维向量,其中每个维度表示机器人的一个状态变量。
机器人的位置是一个重要的状态变量。
可以使用笛卡尔坐标系或关节坐标系来表示机器人的位置。
在笛卡尔坐标系中,机器人的位置可以用机器人的x、y和z坐标来表示。
在关节坐标系中,机器人的位置可以用机器人的关节角度来表示。
机器人的速度和加速度也是重要的状态变量。
机器人的速度表示机器人在各个方向上的运动速率,而加速度表示机器人的运动加速度。
这些状态变量可以用向量形式表示,其中每个分量表示机器人在不同方向上的速度或加速度。
除了位置、速度和加速度,机器人的姿态也是重要的状态变量。
姿态可以用欧拉角或四元数来表示。
欧拉角包括滚转角、俯仰角和偏航角,用于描述机器人的旋转姿态。
四元数是一种更复杂的表示方法,可以更准确地描述旋转姿态。
机器人的运动方式也可以作为状态变量进行表示。
例如,机器人可以进行直线运动、圆弧运动或旋转运动。
这些运动方式可以用状态变量来表示,并与其他状态变量进行组合,以描述机器人的整体运动状态。
除了上述状态变量,还可以将其他与机器人运动相关的参数和约束条件考虑在内。
例如,机器人的负载能力、工作空间限制、关节限制等都可以作为状态变量进行表示。
Scara机器人的状态空间表达式可以包括位置、速度、加速度、姿态、运动方式以及其他相关参数和约束条件。
通过对这些状态变量进行建模和控制,可以实现对机器人运动的精确控制和规划。
Scara机器人的状态空间表达式是一个多维向量,用于描述机器人的位置、速度、加速度、姿态、运动方式以及其他相关参数和约束条件。
通过对这些状态变量的建模和控制,可以实现对机器人运动的精确控制和规划。
SCARA机器人的课程设计一、课程目标知识目标:1. 学生能理解SCARA机器人的基本结构、工作原理及功能特点。
2. 学生能掌握SCARA机器人的运动学模型,包括正解与逆解的计算。
3. 学生了解SCARA机器人在工业生产中的应用及其优势。
技能目标:1. 学生能够运用CAD软件绘制SCARA机器人的三维模型。
2. 学生能够通过编程实现对SCARA机器人的运动控制。
3. 学生能够运用所学知识解决SCARA机器人在实际应用中遇到的问题。
情感态度价值观目标:1. 培养学生对机器人技术的兴趣,激发创新意识。
2. 培养学生团队合作精神,提高沟通与协作能力。
3. 增强学生对我国智能制造产业的认同感,树立正确的价值观。
课程性质:本课程为高二年级信息技术课程,结合物理、数学等相关知识,以实践操作为主。
学生特点:高二学生对机器人有一定了解,具备一定的理论基础,动手实践能力较强。
教学要求:通过本课程的学习,使学生能够将理论知识与实践相结合,提高解决实际问题的能力。
在教学过程中,注重培养学生的创新思维、动手操作和团队协作能力,为我国智能制造产业发展储备优秀人才。
课程目标分解为具体学习成果,以便于教学设计和评估。
二、教学内容1. SCARA机器人概述:介绍SCARA机器人的发展历程、基本结构及其在工业生产中的应用场景。
教材章节:第二章 机器人概述2. SCARA机器人工作原理:讲解SCARA机器人的运动学原理,包括正解与逆解的计算方法。
教材章节:第三章 机器人运动学3. SCARA机器人设计与建模:学习使用CAD软件设计SCARA机器人的三维模型。
教材章节:第四章 机器人设计与建模4. SCARA机器人编程与控制:学习编程语言,实现对SCARA机器人的运动控制。
教材章节:第五章 机器人编程与控制5. SCARA机器人应用案例分析:分析SCARA机器人在实际工业生产中的应用案例,探讨其优势和局限性。
教材章节:第六章 机器人应用案例6. 实践操作:分组进行SCARA机器人的组装、编程与调试,培养学生的动手操作和团队协作能力。
2020.01科学技术创新始形成,澳大利亚板块和西兰板块开始分离,这也标志着冈瓦纳古陆东南部进入到最后一期分裂。这一阶段存在大量依附地形沉积填充物,沉积物的厚度大约在0-600米,这一阶段的沉积物被视为潜在的石油烃源岩,是可行的勘探目标层。2.4热沉降阶段如图1e所示,塔斯曼海在马斯特里赫特期持续扩张,澳大利亚大陆与西兰大陆之间的洋壳宽度也越来越大,但其扩张速率相较于第二次裂谷阶段已经大大降低,这时澳大利亚与南极洲分离的趋势也越来越明显,之间的裂谷由西向东陆续张开。这一阶段主要以沉积作用为主,沉积厚度可达1500-1800米,在一些相对较浅的海洋环境中有可能间断恢复非海洋环境,沉积部分海绿石粉砂岩。这一部分被认为具有良好的储层条件。2.5被动大陆边缘阶段如图1f所示,塔斯曼海的洋中脊在约52Ma停止扩张,该海域的边缘也基本保持现状到现今阶段。这一阶段盆地内的陆源沉积物供给发生中断,转而开始沉积深海淤泥与粘土等物质,这也为该区域形成了一个巨大的沉积盖层,利于有机物质的保存。3结论综上所述,塔斯曼海是晚白垩世(约84Ma)开始开放,并于始新世(约52Ma)停止开放并达到现今的海洋规模,塔斯曼海的形成演化过程可以分为五个阶段,即:第一次陆内裂谷阶段、构造反转阶段、第二次陆间裂谷阶段、热沉降阶段、被动陆缘阶段。参考文献[1]刘福寿.西南太平洋地质构造特征[J].海洋科学进展,1989(4):
34-40.
[2]李凯,宋立军,东玉等.塔斯曼海构造特征及其演化过程研究[J].海洋学报,2019,41(3):96-105.[3]AustraliaCG.LordHoweRise[OL].http://www.ga.gov.au/scientific-topics/energy/province-sedimentary-basin-geology/petroleum/offshore-eastern-australia/lord-howe-rise,2014/2017-5-12.[4]GainaC,M俟llerDR,RoyerJY,etal.ThetectonichistoryoftheTasmanSea:Apuzzlewith13pieces[J].JournalofGeophysicalResearchSolidEarth,1998,103(B6):12413-12433.[5]GainaC,M俟llerRD,RoestWR,etal.TheOpeningoftheTasmanSea:AGravityAnomalyAnimation[J].EarthInteractions,1998,2(1):1-23.
电子科技大学
实验报告
学生姓名:
一、实验室名称:机电一体化实验室
二、实验项目名称:实验三SCARA
学号:
机器人的运动学分析
三、实验原理:
机器人正运动学所研究的内容是:给定机器人各关节的角度,计算机器人末端执行器相对于参考坐标系的位置和姿态问题。
各连杆变换矩阵相乘,可得到机器人末端执行器的位姿方程(正运动学方程)
为:
n x o x a x p x
0T40T1 11T2 22T3 d3
n y o y a y p y
( 1-5)3T4 4=
o z a z p z
n z
0001
式 1-5 表示了 SCARA 手臂变换矩阵0 T4,它描述了末端连杆坐标系{4} 相对基坐标系 {0}
的位姿,是机械手运动分析和综合的基础。
式中: n x c1c2c4s1 s2 c4 c1 s2s4s1 c2 s4,n y s1c2 c4c1 s2 c4s1 s2 s4c1c2 s4 n z0 , o x c1c2 s4s1 s2 s4 c1 s2 c4s1c2c4
o y s1c2 s4c1 s2 s4s1 s2 c4c1c2c4
o z0 , a x0 , a y0 , a z1
p x c1 c2 l2s1s2l 2c1l 1, p y s1c2 l 2 c1 s2 l 2 s1l1, p z d3
机器人逆运动学研究的内容是:已知机器人末端的位置和姿态,求机器人对应于这个位置和姿态的全部关节角,以驱动关节上的电机,从而使手部的位姿符合要求。
与机器人正运动学分析不同,逆问题的解是复杂的,而且具有多解性。
1)求关节 1: 1
A arctg
1 A
2
l 12 l 22
p x 2
p y 2
arctg
p x 式中:A
p x 2 ;
p y
2l 1
p y 2
2)求关节 2: 2
r cos( 1
)
arctg
) l 1
r sin( 1
式中 : r
p x 2 p y 2 ;arctg
p x
p y
3). 求 关节变 量 d 3
令左右矩阵中的第三行第四个元素(3.4)相等,可得:
d 3
p z
4). 求 关节变 量 θ 4
令左右矩阵中的第二行第一个元素(1.1,2.1 )相等,即:
sin 1 n x cos 1n y
sin 2 cos 4
cos 2 sin 4
由上式可求得:
4 arctg (
sin 1 n x cos 1
n
y
)2
cos 1 n x
sin
1
n
y
四、实验目的:
1. 理解 SCARA 机器人运动学的 D-H 坐标系的建立方法;
2. 掌握 SCARA 机器人的运动学方程的建立;
3. 会运用方程求解运动学的正解和反解;
( 1-8)
( 1-9)
( 1-10 )
五、实验内容:
1 给机器人四个关节各一个位移量,利用运动学分析的正解方程求出它机器人末端的位置和姿态,然后在机器人实验操作界面上,打开机器人运动分析菜单,输入同样的四个位移量,让机器人求出它末端的位置和姿态,看是否一样。
2给机器人一组末端的位置和姿态,据运动方程的逆解求机器人对应于这个位置和姿态的全部关节角。
然后在机器人实验操作界面上,打开机器人运动分析菜单,输
入同样的位置和姿态参数,让机器人求出它达到这个位置和姿态的各关节角,看是否一样。
六、实验器材(设备、元器件):
1. KLD-400型 SCARA 教学机器人
2. KLD-400型 SCARA 教学机器人配套软件控制系统
3.装有 Windows系列操作系统的 PC机
4. KLD-400型 SCARA 教学机器人控制箱
5.实验平台(带有标尺的)板
七、实验步骤及操作:
1、先把运动控制卡插入ISA 插槽,按要求将 SCARA机器人的连线都连好;
2、然后运行科利达公司提供的软件,运行菜单栏内的运动学分析,点击正运动学菜单,就会看到操作界面,在要求输入数值的地方输入相应的数值,点击计算按钮,结果就会在文本框中显示,记录下此时的输入与输出值;
3、这个结果与手工算出的结果相比较,是否一致,如果不一致,请分析原因;
4、点击运动学分析菜单下的逆运动学分析的菜单,按要求输入相应的数值,点击计算按钮,结果就会在输出的文本框中显示,记录此时的输入和输出值;
5、这个结果与手工算出的结果相比较,是否一致,由于逆解具有多解性,分析计算时应
该舍哪个解是正确的。
八实验数据及结果分析:
1.软件正运动学分析结果:
输入值120240d3- 50445
nx-0.25819ox-0.9659ax0px255.459输出值ny0.965926oy-0.2588ay0py185.317 nz0oz0az1pz-240
手算正运动学分析
输入值120240d3- 50445
nx-0.25820ox-0.966ax0px255.46输出值ny0.96593oy-0.259ay0py185.32 nz0oz0az1pz-240
2.软件逆运动学分析结果 :
px219py226pz-220
输入值
nx1ny0
输出值
129.5869
2
40.9066d-30
3
手算逆运动分析结果:
px219py226pz-220输入值
nx1ny0
输出值129.587
240.91d3-304
4
-70.4935
-70.494
九、实验结论:
十、总结及心得体会:
十一、对本实验过程及方法、手段的改进建议:
报告评分:
指导教师签字:。