SCARA机器人运动学分析
- 格式:doc
- 大小:122.00 KB
- 文档页数:6
scara四轴机器人丝杆原理概述:scara四轴机器人丝杆原理,是一种机器人操作原理,它是四至机器人中最具代表性的,由于它的机械结构设计独特,它可以提供优秀的性能。
scara四轴机器人可以实现多轴控制运动,具有高精度、高速度、高可靠性等优点,广泛应用于工业制造领域。
一、scara四轴机器人原理的基础scara四轴机器人采用的是丝杆驱动原理,丝杆驱动原理是指通过螺纹副转动螺旋摆杆和丝杆,在两者之间产生相对运动,从而控制机器人的运动、位置和方向。
二、scara四轴机器人中丝杆的角色丝杆是scara四轴机器人中非常重要的一个部件,它的主要角色是将电机产生的回转运动转化为直线运动,从而控制机器人的运动、位置和方向。
通过丝杆的运动,机器人可实现高精度的位置控制。
三、scara四轴机器人丝杆的工作原理机器人的工作原理是由电脑控制驱动输出电的结果,电机转动带动丝杆旋转,丝杆通过固定在螺旋摆杆上的丝杆螺母,将旋转运动转化为直线运动,最终控制机器人的运动、位置和方向。
四、scara四轴机器人丝杆的特点1.高精度:丝杆驱动机构能实现精度高达0.001mm的位置控制。
2.高效率:丝杆驱动机构运动效率高,能够实现快速、精确的位置控制。
3.稳定性高:丝杆驱动机构可以提供稳定的直线运动,防止机器人出现重复误差。
4.结构简单:丝杆驱动机构结构简单,不需要额外的传动机构。
五、scara四轴机器人中丝杆的发展趋势目前,丝杆驱动机构已经逐渐成为scara四轴机器人运动控制的主流方式,未来它仍将继续保持这个趋势。
同时,随着机器人技术的不断发展,丝杆驱动机构的精度、稳定性和性能也会不断提高,将在更多的领域得到应用。
总之,scara四轴机器人丝杆原理是机器人技术中不可或缺的一部分,其优点在机器人制造中扮演着重要的角色。
相信随着技术的不断发展,scara四轴机器人的丝杆驱动机构将变得更加高效、精准和高品质。
SCARA工业设计计算说明书SCARA工业设计计算说明书1、引言这个文档旨在提供关于SCARA(Selective Compliance Assembly Robot Arm)工业的设计和计算的详细说明。
本文档将涵盖的设计原理、运动学计算、动力学计算、控制系统、安全性考虑以及其他相关内容。
2、设计原理2.1 结构设计在设计SCARA工业时,需要考虑的结构类型和材料选择。
此章节将详细描述SCARA的结构设计原理和相关参数。
2.2 运动学原理SCARA的运动学是学中重要的一部分。
此章节将详细讲解运动学原理,包括正逆运动学计算、坐标系选择以及关节角度计算等。
3、运动学计算3.1 正逆运动学计算本章节将介绍SCARA的正逆运动学计算方法及其实际应用。
详细讲解的坐标变换、关节角度计算和工具路径规划等内容。
3.2 轨迹规划在SCARA的应用中,轨迹规划是一个关键的部分。
本章节将介绍常见的轨迹规划算法,并讨论其适用性和实施方法。
4、动力学计算4.1 驱动系统驱动系统是SCARA的核心组成部分之一。
本章节将详细讨论驱动系统的设计和计算,包括电机选择、减速器设计和动力学参数计算等。
4.2 动力学模型动力学模型是的关键组成部分之一。
本章节将介绍SCARA的动力学模型,并详细讨论重要的动力学参数计算和应用方法。
5、控制系统控制系统是SCARA实现精准控制和运动的关键。
本章节将介绍常见的控制系统设计原则和方法,包括PID控制、运动控制算法和通信接口设计等。
6、安全性考虑为了保证SCARA的安全性和人机合作能力,在设计过程中需要考虑相关的安全性因素。
本章节将详细讨论安全性设计原则和相关的安全性机制。
7、其他相关内容本章节将包括SCARA的应用领域、未来发展趋势、经济性评估以及其他相关内容。
附件:本文档涉及的附件包括示意图、计算表格和相关参考资料等。
法律名词及注释:1、SCARA:Selective Compliance Assembly Robot Arm,选择性顺应性装配手臂。
scara机器人工作原理首先,选择性柔性组装意味着Scara机器人在进行组装任务时具有其中一种程度的灵活性和自适应能力。
它可以根据任务的需要进行不同的动作和位置调整,以适应不同的工件形状和尺寸。
与传统的刚性组装机器人相比,Scara机器人能够更好地适应多样化的组装任务。
其次,Scara机器人的运动控制是通过控制四个关节实现的。
这四个关节包括两个旋转关节和两个平移关节,它们分别控制机械臂在水平和垂直方向的移动。
这种运动控制结构使得机械臂能够在二维平面内进行多种动作和运动轨迹,例如直线轨迹、圆弧轨迹和螺旋轨迹等。
具体来说,Scara机器人的工作原理涉及以下几个方面:1. 动力系统:Scara机器人通常由电机驱动,其中每个关节都有一个电机来控制它的运动。
电机可根据用户指令在特定角度范围内旋转,控制机械臂的运动。
2. 控制系统:Scara机器人的控制系统由一个中央控制器和多个传感器组成。
中央控制器负责处理和执行用户输入的指令,控制机械臂的运动。
传感器可用于获取环境信息和机械臂状态,以实现精确的定位和运动控制。
3. 运动规划:在执行组装任务之前,Scara机器人需进行运动规划,即确定机械臂的运动轨迹和动作顺序。
根据用户输入的组装要求和环境条件,机器人会通过算法计算出最佳的运动轨迹,以实现高效的组装任务。
4.动作执行:一旦运动规划完成,机器人就会根据计算出的运动轨迹执行动作。
它会根据指令将各个关节移动到相应的位置和角度,以完成特定的组装任务。
需要注意的是,Scara机器人通常用于装配和组装任务,例如在电子元件装配、制造业、医疗设备等领域。
机器人的机械结构和运动控制设计使其能够在狭小的工作空间内进行高精度的组装操作。
此外,Scara机器人还可以与其他自动化设备和系统集成,以实现更高级别的自动化生产。
例如,它可以与视觉系统和传输带等设备配合使用,实现自动检测、定位和传送工件,提高生产效率和质量。
总结起来,Scara机器人的工作原理基于选择性柔性组装和运动控制的基本原则,通过动力系统、控制系统、运动规划和动作执行等步骤,实现高精度、高效率的装配和组装任务。


3轴scara 运动学3轴SCARA机器人是一种常见的工业机器人,其运动学是指机器人的运动学模型和运动规划方法。
本文将介绍3轴SCARA机器人的运动学原理和相关应用。
我们需要了解什么是3轴SCARA机器人。
3轴SCARA机器人是一种具有3个旋转关节的机器人,其中两个关节在水平平面上进行旋转,第三个关节在垂直平面上进行旋转。
这种机器人结构使其具有较大的工作空间和高精度的定位能力,因此被广泛应用于装配、喷涂、搬运等工业领域。
3轴SCARA机器人的运动学分为正运动学和逆运动学两个方面。
正运动学是指根据机器人各关节的位置和姿态,计算机器人末端执行器的位置和姿态。
逆运动学则是根据机器人末端执行器的位置和姿态,计算各关节的位置和姿态。
正、逆运动学是实现机器人运动控制的基础。
在正运动学中,我们可以使用DH参数方法来表示机器人的连杆长度和关节角度,并建立坐标系。
通过逐个计算每个关节的变换矩阵,可以得到机器人末端执行器的位置和姿态。
逆运动学则是根据机器人末端执行器的位置和姿态,通过逆解求解各关节的角度。
逆运动学的求解通常有多解性,需要根据特定的应用需求选择合适的解。
除了正、逆运动学,3轴SCARA机器人还需要进行轨迹规划和插补控制。
轨迹规划是指根据机器人的起始位置和目标位置,计算机器人的运动轨迹。
常见的轨迹规划方法有直线插补和圆弧插补。
直线插补是指机器人沿直线路径移动,而圆弧插补则是指机器人沿圆弧路径移动。
插补控制是指根据轨迹规划的结果,控制机器人按照规划的轨迹进行运动。
在实际应用中,3轴SCARA机器人被广泛应用于装配生产线、喷涂生产线、搬运生产线等工业领域。
例如,在装配生产线上,机器人可以根据产品的装配要求,将零部件准确地放置在指定位置,实现自动化装配。
在喷涂生产线上,机器人可以根据喷涂路径规划,将涂料均匀地喷涂在产品表面,提高喷涂效率和质量。
在搬运生产线上,机器人可以根据物料的位置和重量,将物料准确地搬运到指定位置,实现自动化搬运。
scara机器人动力学参数
SCARA机器人是一种四自由度、二维平面构型的机器人,因此其动力学参数也比较简单,一般包括以下几种:
1.手臂长度:机器人手臂长度决定了其工作空间大小,也是机器人动力学参数中比较重要的一项参数。
2.质量分布:因为机器人在工作时需要负载,所以机器人的质量分布也是动力学参数中很关键的一项。
机器人的质心位置、各关节质量以及末端执行器的质量都是需要考虑的。
3.关节惯性:机器人的四个关节都会参与到运动中,因此各关节的惯性也需要考虑。
具体而言,需要计算出各关节的转动惯量和质心到关节轴心的距离。
4.驱动器特性:驱动器的特性是指机器人的电动机,包括电机的转矩-角度曲线、电机控制带宽以及各关节的传动机构等。
5.摩擦力:机器人运动时会产生摩擦力,这也是机器人动力学参数中需要考虑的因素之一。
这包括质量重心的摩擦力、关节之间的摩擦力、传动机构摩擦力等。
6.控制算法:最后一个动力学参数是机器人的控制算法,包括PID控制器、增益分配控制器、最优控制器等。
这些控制算法会决定机器人如何根据给定目标控制各关节,从而实现预定的运动轨迹。
实验一机器人运动学实验一、实验目的1.了解四自由度机械臂的开链结构;2.掌握机械臂运动关节之间的坐标变换原理;3.学会机器人运动方程的正反解方法。
二、实验原理本实验以SCARA四自由度机械臂为例研究机器人的运动学问题.机器人运动学问题包括运动学方程的表示,运动学方程的正解、反解等,这些是研究机器人动力学和机器人控制的重要基础,也是开放式机器人系统轨迹规划的重要基础。
机械臂杆件链的最末端是机器人工作的末端执行器(或者机械手),末端执行器的位姿是机器人运动学研究的目标,对于位姿的描述常有两种方法:关节坐标空间法和直角坐标空间法。
本次实验用D-H变化方法求解运动学问题。
建立坐标系如下图所示连杆坐标系{i }相对于{ i −1 }的变换矩阵可以按照下式计算出,其中连杆坐标系D-H 参数为由表1-1给出。
齐坐标变换矩阵为:其中描述连杆i 本身的特征;和描述连杆 i− 1与i 之间的联系。
对于旋转关节,仅是关节变量,其它三个参数固定不变;对于移动关节,仅是关节变量,其它三个参数不变。
表1-1 连杆参数表其中连杆长l1=200mm,l2=200mm,机器人基坐标系为O-XYZ。
根据上面的坐标变换公式,各个关节的位姿矩阵如下:运动学正解:各连杆变换矩阵相乘,可得到机器人末端执行器的位姿方程(正运动学模型)为:其中:z 轴为手指接近物体的方向,称接近矢量 a (approach);y 轴为两手指的连线方向,称方位矢量o(orientation);x 轴称法向矢量n(normal),由右手法则确定,n=o*a。
p 为手爪坐标系原点在基坐标系中的位置矢量。
运动学逆解:通常可用未知的连杆逆变换右乘上式:令两式对应元素分别相等即可解出。
其中将上式回代,可得,令第二行第四个元素对应相等,可得:令第四行第三个元素对应相等,可得:所以,三、实验步骤步骤1.检查实验系统各部分的信号连接线、电源是否插好,完成后打开伺服驱动系统的电源开关。
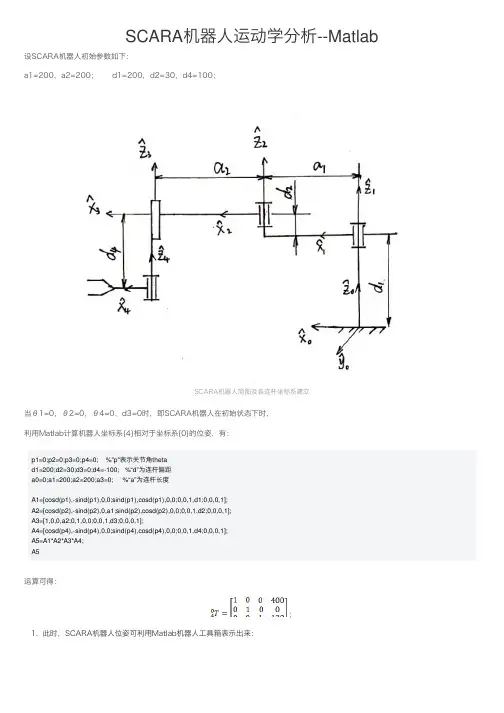
SCARA机器⼈运动学分析--Matlab 设SCARA机器⼈初始参数如下:a1=200,a2=200; d1=200,d2=30,d4=100;SCARA机器⼈简图及各连杆坐标系建⽴当θ1=0,θ2=0,θ4=0,d3=0时,即SCARA机器⼈在初始状态下时,利⽤Matlab计算机器⼈坐标系{4}相对于坐标系{0}的位姿,有:p1=0;p2=0;p3=0;p4=0; %"p"表⽰关节⾓thetad1=200;d2=30;d3=0;d4=-100; %“d”为连杆偏距a0=0;a1=200;a2=200;a3=0; %“a”为连杆长度A1=[cosd(p1),-sind(p1),0,0;sind(p1),cosd(p1),0,0;0,0,1,d1;0,0,0,1];A2=[cosd(p2),-sind(p2),0,a1;sind(p2),cosd(p2),0,0;0,0,1,d2;0,0,0,1];A3=[1,0,0,a2;0,1,0,0;0,0,1,d3;0,0,0,1];A4=[cosd(p4),-sind(p4),0,0;sind(p4),cosd(p4),0,0;0,0,1,d4;0,0,0,1];A5=A1*A2*A3*A4;A5运算可得:;1. 此时,SCARA机器⼈位姿可利⽤Matlab机器⼈⼯具箱表⽰出来:代码如下:%[]中参数依次为关节⾓theta 连杆偏距d 连杆长度a 连杆扭转⾓alpha 关节变量偏移量offsetL1=Link([0 200 0 0],'modified');L2=Link([0 30 200 0],'modified');L3=Link([0 0 200 0 1],'modified');L4=Link([0 -100 0 0],'modified');SCARA=SerialLink([L1 L2 L3 L4], 'name', 'SCARA');%机器⼈各关节限位设置SCARA.qlim=[-125*pi/180 125*pi/180;-140*pi/180 140*pi/180;0 200;-2*pi 2*pi];SCARA.plot([0 0 0 0], 'workspace',[-400 600 -500 500 -100 500]);SCARA.teach当θ1=20°,θ2=20°,θ4=30°,d3=-100时,SCARA机器⼈在此状态时,位姿如图所⽰:此时,在matlab中⽤欧拉⾓公式解位姿坐标,代码及结果如下:%输⼊欧拉⾓度alpha = input('Roatate around the z-axis in alpha = ');beta = input('Roatate around the y-axis in alpha = ');gamma = input('Roatate around the x-axis in alpha = ');%分别计算出绕X、Y、Z轴的旋转算⼦RZ = [cosd(alpha) -sind(alpha) 0sind(alpha) cosd(alpha) 00 0 1];RY = [cosd(beta) 0 sind(beta)0 1 0-sind(beta) 0 cosd(beta)];RX = [ 1 0 00 cosd(gamma) -sind(gamma)0 sind(gamma) cosd(gamma)];T =RZ*RY*RX %计算旋转矩阵TAB此处绕z轴转70°,x轴和y轴均为0°。
SCARA机器人的运动学分析一、SCARA机器人的结构和坐标系SCARA机器人由基座、旋转关节1、旋转关节2和活动臂组成。
旋转关节1使机械臂在水平平面内可以旋转,旋转关节2使机械臂可以在垂直方向上旋转,活动臂则可以伸缩。
SCARA机器人的坐标系一般选择以旋转关节1为原点,机械臂的长度为x轴正方向,垂直向下为y轴正方向,z轴垂直于水平平面向上为正方向。
二、运动学分析的基本原理首先,通过逆运动学计算机器人各个关节角度。
逆运动学问题是指已知末端执行器的位置和姿态,求解机械臂各个关节角度的问题。
逆运动学问题的求解方法有很多种,常用的方法有几何解法和解析解法。
其次,通过正运动学计算机器人末端执行器的位置和姿态。
正运动学问题是指已知机械臂各个关节角度,求解末端执行器的位置和姿态的问题。
正运动学问题的求解方法可以使用坐标变换的方法得到。
三、逆运动学的求解逆运动学的求解可以通过几何解法或解析解法来实现。
几何解法常用于简单的机械臂结构,其原理是通过三角关系计算出关节角度。
解析解法则通过数学公式推导得出关节角度。
几何解法需要先确定末端执行器的位置和姿态矢量,然后计算出关节角度。
例如,对于SCARA机器人的角度1和角度2,可以通过余弦定律和正弦定律计算得到。
具体计算公式如下:d=d1−d2d=d/dd=(d^2−1+√(d^4−2d^2(d^2−d1^2)+(d^2−√(d^2−d1^2))^2 ))/(2(√(d^2−d1^2)))d=(d^2−1−√(d^4−2d^2(d^2−d1^2)+(d^2−√(d^2−d1^2))^2 ))/(2(√(d^2−d1^2)))其中,d为关节1和关节2的夹角,u为x轴方向上的矢量,w和v分别为y轴和z轴方向上的矢量。
d为末端执行器在机械臂坐标系的x坐标,z为末端执行器在机械臂坐标系的z坐标,d1为机械臂第一段的长度。
解析解法则通过推导得到解析解的公式,根据公式直接计算关节角度。
双SCARA机器人运动学及奇异性分析正解即给定关节角度,求末端执行器的位置和姿态。
对于双SCARA机器人来说,可以通过连续两次运动关节角度的步骤来得到末端执行器的位置。
首先,通过前两个关节的角度计算出第三关节(水平方向关节)的位置;然后,通过第三个关节的位置和最后一个关节的角度计算出末端执行器的位置和姿态。
逆解即给定末端执行器的位置和姿态,求解关节角度。
对于双SCARA 机器人来说,逆解可以通过以下步骤实现。
首先,根据末端执行器的位置和姿态,计算出第三关节的位置;然后,通过第三关节的位置和末端执行器的位置和姿态,计算出最后一个关节的角度;最后,通过第三关节的位置和最后一个关节的角度,计算出前两个关节的角度。
在进行运动学分析时,需要注意的是机器人的奇异性问题。
奇异性是指机器人在特定位置和姿态时,存在关节角度无法求解或结果出现突变的情况。
奇异性可能导致机器人无法继续执行运动或者导致意外的运动。
在双SCARA机器人中,奇异性一般发生在两个水平关节的角度接近180°或0°时。
在这些位置附近,机器人的雅可比矩阵会趋于奇异,从而导致无法求解逆解或结果的突变。
为了避免奇异性问题,可以通过调整机器人的工作空间或限制其运动范围来解决。
综上所述,双SCARA机器人的运动学分析包括正解和逆解两个部分,通过计算关节角度和末端执行器的位置和姿态之间的关系来实现。
在进行运动学分析时,需要特别关注机器人的奇异性问题,以避免由于奇异性导致的无法求解或结果突变的情况。
scara机器人正逆解公式Scara机器人正逆解公式一、引言Scara机器人是一种常见的工业机器人,在工业生产中具有广泛的应用。
而机器人的运动学正逆解是实现机器人自动化控制的重要基础。
本文将介绍Scara机器人的正逆解公式,帮助读者更好地理解和应用于实践中。
二、Scara机器人的基本结构Scara机器人的基本结构由两个旋转关节和两个直线关节组成,形状类似于人的手臂。
它的工作区域通常是一个平面或者是一个接近平面的空间。
Scara机器人的末端执行器可以在平面内进行平移和旋转运动,具有较高的精度和速度。
三、Scara机器人的正解正解是指根据机器人各关节的角度输入,计算机器人末端执行器的位置和姿态坐标。
Scara机器人的正解公式如下:1. 计算关节1的角度:θ1 = atan2(Y, X)2. 计算关节3的角度:θ3 = L1 - L23. 计算关节2的角度:θ2 = atan2(Z - L1, sqrt(X^2 + Y^2) - L2)4. 计算关节4的角度:θ4 = θ - θ2 - θ3其中,X、Y、Z分别表示末端执行器的位置坐标,L1和L2为机器人的臂长,θ为末端执行器的姿态角。
四、Scara机器人的逆解逆解是指根据机器人末端执行器的位置和姿态输入,计算机器人各关节的角度。
Scara机器人的逆解公式如下:1. 计算关节1的角度:θ1 = atan2(Y, X)2. 计算关节4的角度:θ4 = θ - θ2 - θ33. 计算关节3的角度:θ3 = L1 - L24. 计算关节2的角度:θ2 = atan2(Z - L1, sqrt(X^2 + Y^2) - L2)其中,X、Y、Z分别表示末端执行器的位置坐标,L1和L2为机器人的臂长,θ为末端执行器的姿态角。
五、Scara机器人正逆解公式的应用Scara机器人正逆解公式的应用非常广泛。
通过正解公式,可以根据机器人各关节的角度来计算末端执行器的位置和姿态,从而实现机器人的精确控制。
scara机器人运动学方程雅可比矩阵
Scara机器人是一种广泛应用于工业领域的机器人,它的运动学方程雅可比矩阵是描述其运动学性能的重要工具。
通过雅可比矩阵,我们可以了解到Scara机器人在不同关节位置和速度下的末端执行器的速度和位置关系。
雅可比矩阵是一个2x3的矩阵,其中的元素代表了末端执行器位置和速度相对于关节角度和速度的变化率。
简单来说,雅可比矩阵可以帮助我们理解Scara机器人的动力学特性和运动规律。
通过对雅可比矩阵的分析,我们可以得到一些有用的信息。
首先,我们可以确定Scara机器人的工作空间范围,即机器人可以到达的位置和姿态。
其次,我们可以根据雅可比矩阵来计算机器人在不同关节角速度下的末端执行器速度,从而实现机器人的精确控制。
除此之外,雅可比矩阵还可以用于路径规划和碰撞检测。
通过计算机器人在不同关节位置下的雅可比矩阵,我们可以确定机器人在执行任务过程中是否会发生碰撞,从而避免潜在的安全风险。
Scara机器人的运动学方程雅可比矩阵是研究机器人运动学行为和控制的重要工具。
通过对雅可比矩阵的研究和分析,我们可以深入理解机器人的运动规律,并实现对机器人的精确控制和路径规划。
电子科技大学实验报告学生姓名:一、实验室名称:机电一体化实验室二、实验项目名称:实验三SCARA学号:机器人的运动学分析三、实验原理:机器人正运动学所研究的内容是:给定机器人各关节的角度,计算机器人末端执行器相对于参考坐标系的位置和姿态问题。
各连杆变换矩阵相乘,可得到机器人末端执行器的位姿方程(正运动学方程)为:n x o x a x p x0T40T1 11T2 22T3 d3n y o y a y p y( 1-5)3T4 4=o z a z p zn z0001式 1-5 表示了 SCARA 手臂变换矩阵0 T4,它描述了末端连杆坐标系{4} 相对基坐标系 {0}的位姿,是机械手运动分析和综合的基础。
式中: n x c1c2c4s1 s2 c4 c1 s2s4s1 c2 s4,n y s1c2 c4c1 s2 c4s1 s2 s4c1c2 s4 n z0 , o x c1c2 s4s1 s2 s4 c1 s2 c4s1c2c4o y s1c2 s4c1 s2 s4s1 s2 c4c1c2c4o z0 , a x0 , a y0 , a z1p x c1 c2 l2s1s2l 2c1l 1, p y s1c2 l 2 c1 s2 l 2 s1l1, p z d3机器人逆运动学研究的内容是:已知机器人末端的位置和姿态,求机器人对应于这个位置和姿态的全部关节角,以驱动关节上的电机,从而使手部的位姿符合要求。
与机器人正运动学分析不同,逆问题的解是复杂的,而且具有多解性。
1)求关节 1: 1A arctg1 A2l 12 l 22p x 2p y 2arctgp x 式中:Ap x 2 ;p y2l 1p y 22)求关节 2: 2r cos( 1)arctg) l 1r sin( 1式中 : rp x 2 p y 2 ;arctgp xp y3). 求 关节变 量 d 3令左右矩阵中的第三行第四个元素(3.4)相等,可得:d 3p z4). 求 关节变 量 θ 4令左右矩阵中的第二行第一个元素(1.1,2.1 )相等,即:sin 1 n x cos 1n ysin 2 cos 4cos 2 sin 4由上式可求得:4 arctg (sin 1 n x cos 1ny)2cos 1 n xsin1ny四、实验目的:1. 理解 SCARA 机器人运动学的 D-H 坐标系的建立方法;2. 掌握 SCARA 机器人的运动学方程的建立;3. 会运用方程求解运动学的正解和反解;( 1-8)( 1-9)( 1-10 )五、实验内容:1 给机器人四个关节各一个位移量,利用运动学分析的正解方程求出它机器人末端的位置和姿态,然后在机器人实验操作界面上,打开机器人运动分析菜单,输入同样的四个位移量,让机器人求出它末端的位置和姿态,看是否一样。
scara运动正逆解Scara运动正逆解一、引言Scara(Selective Compliance Assembly Robot Arm)是一种常见的工业机器人,其运动学分析中的正逆解是非常重要的内容。
本文将重点介绍Scara机器人的正逆解方法,并对其进行详细阐述。
二、Scara机器人的正解Scara机器人的正解是指根据给定的关节角度,计算出末端执行器(通常是机械手)的位姿(位置和姿态)。
Scara机器人通常由两个旋转关节和一个平移关节组成,即3自由度。
在正解计算中,需要利用运动学模型和几何关系来推导出末端执行器的位姿。
具体来说,Scara机器人的正解可以通过以下步骤计算:1. 根据关节角度和机械臂的几何参数,计算出机械臂各个关节的转换矩阵。
2. 将各个关节的转换矩阵相乘,得到整个机械臂的转换矩阵。
3. 从整个机械臂的转换矩阵中提取出末端执行器的位姿信息,包括位置和姿态。
需要注意的是,Scara机器人的正解计算中需要考虑到各个关节之间的约束条件,以及机械臂的工作空间限制。
通过正解计算,可以得到机械臂在给定关节角度下的位姿信息,为后续的路径规划和控制提供基础。
三、Scara机器人的逆解Scara机器人的逆解是指根据给定的末端执行器的位姿,计算出相应的关节角度。
逆解计算在机器人的路径规划和轨迹控制中起着重要的作用。
Scara机器人的逆解计算相对复杂,需要利用几何关系和三角函数等知识进行推导。
具体来说,Scara机器人的逆解可以通过以下步骤计算:1. 根据给定的末端执行器的位姿,计算出末端执行器的转换矩阵。
2. 根据Scara机器人的几何参数和工作空间限制,推导出关节角的可能解。
3. 利用三角函数和几何关系,计算出满足约束条件的关节角度。
在逆解计算中,需要考虑到机械臂的工作空间限制和关节角度的连续性等问题。
由于Scara机器人的逆解计算相对复杂,通常需要借助计算机算法进行求解。
四、Scara机器人的正逆解应用Scara机器人的正逆解在工业自动化领域有着广泛的应用。