交错等幅振荡函数
- 格式:pdf
- 大小:115.28 KB
- 文档页数:2

.一、填空(每空1分,共18分)1.自动控制系统的数学模型有 、 、 、共4种。
2.连续控制系统稳定的充分必要条件是 。
离散控制系统稳定的充分必要条件是 。
3.某统控制系统的微分方程为:dtt dc )(+0.5C(t)=2r(t)。
则该系统的闭环传递函数 Φ(s)= ;该系统超调σ%= ;调节时间t s (Δ=2%)= 。
4.某单位反馈系统G(s)=)402.0)(21.0()5(1002+++s s s s ,则该系统是 阶 型系统;其开环放大系数K= 。
5.已知自动控制系统L(ω)曲线为:则该系统开环传递函数G(s)= ;ωC = 。
6.相位滞后校正装置又称为 调节器,其校正作用是 。
7.采样器的作用是 ,某离散控制系统)()1()1()(10210T T e Z Z e Z G -----=(单位反馈T=0.1)当输入r(t)=t 时.该系统稳态误差为 。
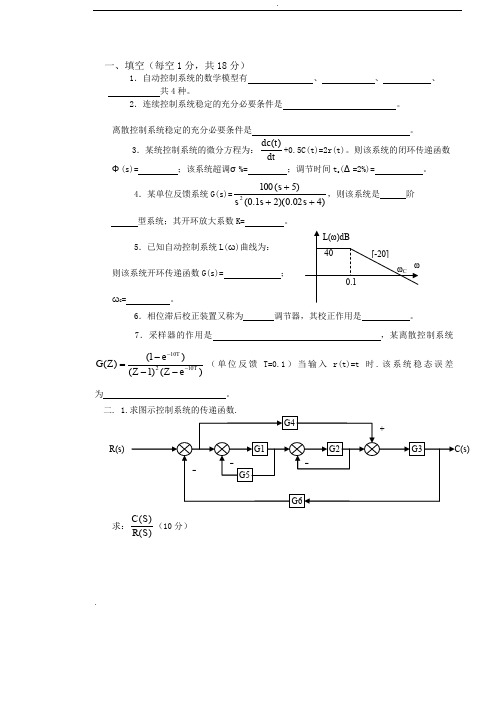
二求:)()(S R S C (10分)R(s)2.求图示系统输出C(Z)的表达式。
(4分)四.反馈校正系统如图所示(12分)求:(1)K f=0时,系统的ξ,ωn和在单位斜坡输入下的稳态误差e ss.(2)若使系统ξ=0.707,k f应取何值?单位斜坡输入下e ss.=?..(1)(2)(3)五.已知某系统L(ω)曲线,(12分)(1)写出系统开环传递函数G(s)(2)求其相位裕度γ(3)欲使该系统成为三阶最佳系统.求其K=?,γmax=?六、已知控制系统开环频率特性曲线如图示。
P为开环右极点个数。
г为积分环节个数。
判别系统闭环后的稳定性。
.七、已知控制系统的传递函数为)1005.0)(105.0(10)(0++=s s s G 将其教正为二阶最佳系统,求校正装置的传递函数G 0(S )。
(12分)一.填空题。
(10分)1.传递函数分母多项式的根,称为系统的2. 微分环节的传递函数为3.并联方框图的等效传递函数等于各并联传递函数之4.单位冲击函数信号的拉氏变换式5.系统开环传递函数中有一个积分环节则该系统为 型系统。



第9章 习题参考答案9-1 设一阶非线性系统的微分方程为3x x x =-+试确定系统有几个平衡状态,分析各平衡状态的稳定性,并作出系统的相轨迹。
解 3x x x =-+由30x x -+=解得1230, 1, 1e e e x x x ===-。
作出系统的相轨迹图如下:平衡状态(0, 0)稳定,平衡状态(1, 0), (1, 0)-不稳定。
9-2 已知非线性系统的微分方程为(1) 320x x x ++= (2) 0x xx x ++= (3) 0x x x ++= (4) 2(1)0x x x x --+= 试确定系统的奇点及其类型,并概略绘制系统的相轨迹图。
解 (1) 奇点(0, 0)。
特征方程为2320λλ++=两个特征根为1,21, 2λ=--平衡点(0, 0)为稳定节点。
在奇点附近的概略相轨迹图:x(2) 奇点(0, 0)。
在平衡点(0, 0)的邻域内线性化,得到的线性化模型为0x x +=其特征方程为210λ+=两个特征根为1,2j λ=±平衡点(0, 0)为中心点。
在奇点附近的概略相轨迹图:x(3) 奇点(0, 0)。
原方程可改写为0000x x x x x x x x ++=≥⎧⎨+-=<⎩其特征方程、特征根和类型为21,221,2100.50.866 10 1.618, 0.618 j λλλλλλ⎧++==-±⎪⎨+-==-⎪⎩稳定焦点鞍点 在奇点附近的概略相轨迹图:(4) 奇点(0, 0)。
在平衡点(0, 0)的邻域内线性化,得到的线性化模型为x x x-+=其特征方程为210λλ-+=两个特征根为1,20.50.866jλ=±平衡点(0, 0)为不稳定焦点。
在奇点附近的概略相轨迹图:xx9-3 非线性系统的结构图如图9-48所示。
系统开始是静止的,输入信号r(t)=4·1(t),试写出开关线方程,确定奇点的位置和类型,在e-e平面上画出该系统的相平面图,并分析系统的运动特点。
热工过程自动调节31调节量:即通过调节需要维持的物理量。
被调节对象:即被调节的生产设备或生产过程。
调节作用量:即在调节作用下,控制被调量变化的物理量。
2自动调节系统的分类:(1)按给定的信号的特点:恒值调节系统、程序调节系统、随机调节系统(2)按调节系统的结构分:反馈调节系统、前馈调节系统、复合调节系统。
(3)按调节系统闭环回路的数口分类:单回路调节系统、多回路调节系统。
(4)按调节作用的形式分:连续调节系统、离散调节系统。
(5)按系统的特性分:线性调节系统、非线性调节系统。
3反馈调节的特点(1)在调节结束时,可以使被调节量等于或接近于给定值,基于偏差的调节(2)在调节系统受到扰动作用时,必须等到被调量出现偏差后才开始调节,所以调节速度相对较慢。
前馈调节的特点:(1)由于扰动影响被调量的同时,调节器的调节作用已产生,所以调节速度响度较快。
基于扰动的调节(2)由于没有被调量的反馈,所以调节结束时不能保证被调量等于给定值。
4自动调节系统的性能指标:(1)稳定性(2)准确性(3)快速性5自动调节系统典型的调节过程:非周期调节过程、衰减振荡调节过程、等幅振荡调节过程、渐扩振荡调节过程6自动调节系统的数学模型:微分方程、传递函数、时间特性、频率特性7环节的基本连接方式:串联、并联、反馈连接8基本环节:比例环节、积分环节、惯性环节、微分环节、纯迟延环节。
各环节的特点:比例环节(响应非常及时),积分环节(响应比较缓慢),惯性环节(响应比较缓慢取决于时间常数T),微分环节(超前响应),纯迟延环节(响应落后与输入信号)9热工对象存在的特性:输出量的变化过程是不振荡的,在扰动发生的开始阶段有迟延和惯性。
在过程的最后阶段,有自平衡能力的对象输出量达到新的稳态值P不为0,无自平衡能力的对象输出量不断变化,不能达到新的稳态值P为0。
10热工对象分为:有自平衡能力的对象(指对象在阶跃扰动作用下,不需要经过外加调节作用,对象经过一段时间后能自己稳定在一个新的平衡状态);无自平衡能力的对象。