自抗扰控制技术简介 ppt课件
- 格式:pptx
- 大小:499.31 KB
- 文档页数:29
自抗扰控制技术一、本文概述自抗扰控制技术是一种先进的控制策略,其核心在于通过内部机制的设计,使系统能够自动抵御和补偿外部干扰和内部参数变化对系统性能的影响。
随着现代工业系统的日益复杂,对控制系统的鲁棒性和稳定性的要求也越来越高,自抗扰控制技术的出现为解决这些问题提供了新的思路和方法。
本文将对自抗扰控制技术进行详细的介绍和分析。
我们将阐述自抗扰控制的基本原理和核心思想,包括其与传统控制方法的主要区别和优势。
我们将介绍自抗扰控制技术的关键组成部分,如扩展状态观测器、非线性状态误差反馈控制律等,并详细解析其在控制系统中的作用和实现方式。
我们将通过实例分析和仿真实验,验证自抗扰控制技术在提高系统鲁棒性和稳定性方面的实际效果,并探讨其在实际工业应用中的潜力和前景。
本文旨在为从事控制系统设计、分析和优化的工程师和研究人员提供一种新的思路和方法,以应对日益复杂的工业控制问题。
也希望通过对自抗扰控制技术的深入研究和应用,为现代工业系统的智能化和自主化提供有力的技术支持。
二、自抗扰控制技术的基本原理自抗扰控制技术是一种先进的控制方法,其基本原理可以概括为对系统内部和外部扰动的主动抑制和补偿。
该技术的核心在于通过特定的控制策略,使系统在面对各种扰动时能够保持其稳定性和性能。
自抗扰控制技术的基本原理主要包括三个部分:扩张状态观测器(ESO)、非线性状态误差反馈(NLSEF)和跟踪微分器(TD)。
扩张状态观测器用于实时估计系统的总扰动,包括内部不确定性和外部干扰。
通过观测并提取这些扰动信息,系统能够在控制过程中主动抵消这些不利影响。
非线性状态误差反馈部分则根据观测到的扰动信息,通过非线性控制律的设计,实现对系统状态的快速调整。
这种非线性控制策略使得系统在面对扰动时能够迅速作出反应,从而保持其稳定性和性能。
跟踪微分器是自抗扰控制技术的另一个重要组成部分,它通过对期望信号的微分处理,生成一系列连续的指令信号。
这些指令信号能够引导系统以平滑、稳定的方式跟踪期望轨迹,进一步提高系统的控制精度和鲁棒性。
3.3自抗扰控制技术的MATLAB仿真自抗扰控制技术是由韩京清教授根据多年实际控制工程经验提出的新的控制理论。
在传统的工业和其他控制领域,PID一直占据主导地位。
目前,PID 在航空航天、运动控制及其他过程控制领域,仍然占据90%以上的份额。
但是,PID自身还是存在缺陷,而韩京清教授正是出于对P1D控制算法的充分认知,尤其是对其缺陷的清晰分析,提出了自抗扰控制技术。
3.3.1自抗扰控制技术概述自抗扰控制技术的提出是根据对PID控制技术的充分认知,扬其优点,抑其缺点而提出的。
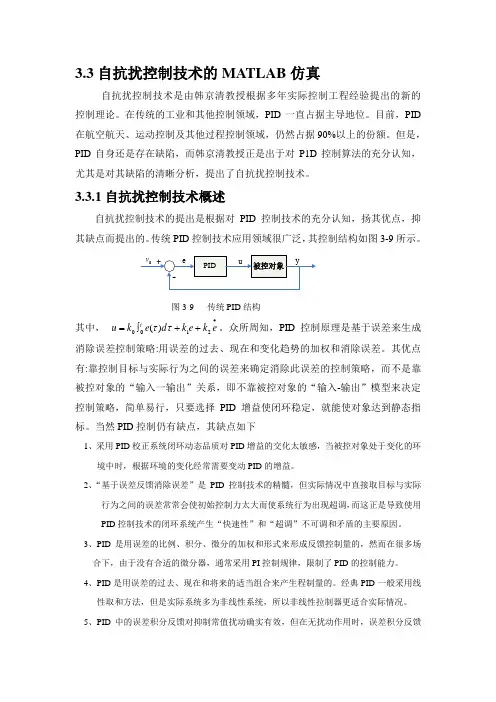
传统PID控制技术应用领域很广泛,其控制结构如图3-9所示。
图3-9 传统PID结构其中,•++⎰=ekekdeku t21)(ττ。
众所周知,PID控制原理是基于误差来生成消除误差控制策略:用误差的过去、现在和变化趋势的加权和消除误差。
其优点有:靠控制目标与实际行为之间的误差来确定消除此误差的控制策略,而不是靠被控对象的“输入一输出”关系,即不靠被控对象的“输入-输出”模型来决定控制策略,简单易行,只要选择PID增益使闭环稳定,就能使对象达到静态指标。
当然PID控制仍有缺点,其缺点如下1、采用PID校正系统闭环动态品质对PID增益的交化太敏感,当被控对象处于变化的环境中时,根据环境的变化经常需要变动PID的增益。
2、“基于误差反馈消除误差”是PID控制技术的精髓,但实际情况中直接取目标与实际行为之间的误差常常会使初始控制力太大而使系统行为出现超调,而这正是导致使用PID控制技术的闭环系统产生“快速性”和“超调”不可调和矛盾的主要原因。
3、PID是用误差的比例、积分、微分的加权和形式来形成反馈控制量的,然而在很多场合下,由于没有合适的微分器,通常采用PI控制规律,限制了PID的控制能力。
4、PID是用误差的过去、现在和将来的适当组合来产生程制量的。
经典PID一般采用线性取和方法,但是实际系统多为非线性系统,所以非线性拉制器更适合实际情况。