线性系统的根轨迹分析
- 格式:ppt
- 大小:2.46 MB
- 文档页数:57
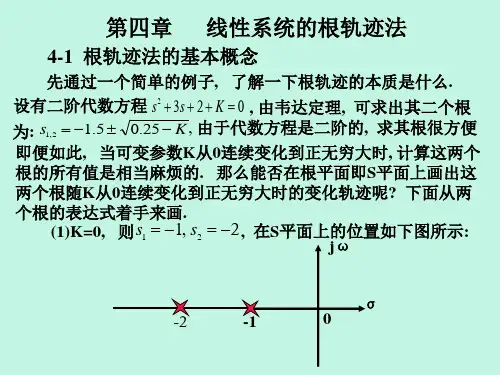
夏德钤《⾃动控制原理》(第4版)章节题库-第4章线性系统的根轨迹分析【圣才出品】第4章 线性系统的根轨迹分析1.系统的开环传递函数试证明:点在根轨迹上,并求出相应的和系统开环增益K。
证明:根据系统的开环传递函数可知,系统的开环极点为由闭环根轨迹的相⾓条件可得:当时,故点在根轨迹上。
由闭环根轨迹的幅值条件可知,此时即相应的根轨迹增益和系统开环增益仿真曲线如图4-1所⽰。
MATLAB程序:exe402.m2.设单位反馈控制系统的开环传递函数为试⽤解析法绘出K*从零变到⽆穷时的闭环根轨迹图,并判断下列点是否在根轨迹上:(﹣2+j0),(0+j1),(﹣3+j2)解:闭环传递函数为则闭环特征⽅程为闭环特征根为当。
可逐个描点得闭环根轨迹如图4-2所⽰,从图4-2中明显可见,只有(-2,j0)在根轨迹上。
图4-23.设单位反馈控制系统的开环传递函数如下,试概略绘制闭环根轨迹图。
解:(1)系统的开环传递函数令为根轨迹增益。
①实轴上的根轨迹:[0,-2],[-5,-∞)。
②根轨迹的渐近线:③根轨迹的分离点:根轨迹的分离点坐标满⾜解得④根轨迹与虚轴的交点:由系统的开环传递函数可知系统的闭环特征⽅程令s=jω,将其代⼊上式可得即由于ω≠0,故可解得则根轨迹与虚轴的交点为±j3.16。
根据以上⼏点,可以画出概略根轨迹如图4-3所⽰。
图4-3 系统(1)概略根轨迹图(2)系统的开环传递函数①实轴上的根轨迹[0,-2],[-3,-5]。
③根轨迹的分离点:根轨迹的分离点坐标满⾜通过试凑可得d=-0.89。
根据以上⼏点,可以画出概略根轨迹如图4-4所⽰。
图4-4 系统(2)概略根轨迹图(3)系统的开环传递函数①实轴上的根轨迹:[-1,-3],[-10,-5]。
②根轨迹的渐近线:③根轨迹的分离点:根轨迹的分离点坐标满⾜通过试凑可得d=-7.27。
根据以上⼏点,可以画出概略根轨迹如图4-5所⽰。
图4-5 系统(3)概略根轨迹图(4)系统的开环传递函数实轴上的根轨迹为[-2,-1],系统概略根轨迹如图4-6所⽰。
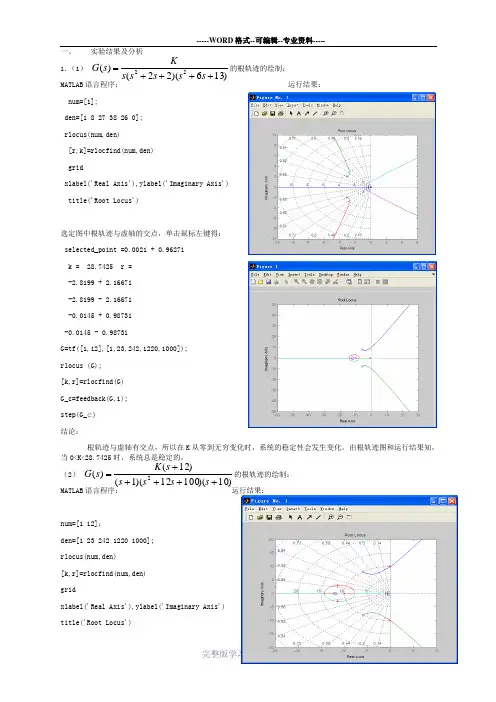
一、 实验结果及分析1.(1) )136)(22()(22++++=s s s s s K s G 的根轨迹的绘制: MATLAB 语言程序: 运行结果:num=[1];den=[1 8 27 38 26 0];rlocus(num,den)[r,k]=rlocfind(num,den)gridxlabel('Real Axis'),ylabel('Imaginary Axis')title('Root Locus')选定图中根轨迹与虚轴的交点,单击鼠标左键得:selected_point =0.0021 + 0.9627ik = 28.7425 r =-2.8199 + 2.1667i-2.8199 - 2.1667i-0.0145 + 0.9873i-0.0145 - 0.9873iG=tf([1,12],[1,23,242,1220,1000]);rlocus (G);[k,r]=rlocfind(G)G_c=feedback(G,1);step(G_c)结论:根轨迹与虚轴有交点,所以在K 从零到无穷变化时,系统的稳定性会发生变化。
由根轨迹图和运行结果知,当0<K<28.7425时,系统总是稳定的。
(2) )10)(10012)(1()12()(2+++++=s s s s s K s G 的根轨迹的绘制: MATLAB 语言程序: 运行结果:num=[1 12];den=[1 23 242 1220 1000];rlocus(num,den)[k,r]=rlocfind(num,den)gridxlabel('Real Axis'),ylabel('Imaginary Axis')title('Root Locus')选定图中根轨迹与虚轴的交点,单击鼠标左键得:selected_point =0.0059 + 9.8758ik =1.0652e+003 r=-11.4165 + 2.9641i -11.4165 - 2.9641i -0.0835 + 9.9528i -0.0835 - 9.9528i 结论:根轨迹与虚轴有交点,所以在K 从零到无穷变化时,系统的稳定性会发生变化。

自动控制原理实验报告实验题目:线性系统的根轨迹班级:学号:姓名:指导老师:实验时间:一、实验目的1. 熟悉MATLAB 用于控制系统中的一些基本编程语句和格式。
2. 利用MATLAB 语句绘制系统的根轨迹。
3. 掌握用根轨迹分析系统性能的图解方法。
4. 掌握系统参数变化对特征根位置的影响。
二、实验内容同时得出在单位阶跃负反馈下使得闭环系统稳定的K 值的范围。
2.1绘制下面系统的根轨迹曲线)136)(22()(22++++=s s s s s Ks G程序:G=tf([1],[1 8 27 38 26 0]); rlocus (G); %绘制系统的根轨迹[k,r]=rlocfind(G) %确定临界稳定时的增益值k 和对应的极点r G_c=feedback(G,1); %形成单位负反馈闭环系统 step(G_c) %绘制闭环系统的阶跃响应曲线-12-10-8-6-4-20246-10-8-6-4-20246810Root LocusReal AxisI m a g i n a r y A x i s0204060801001201400.10.20.30.40.50.60.70.80.91Step ResponseTime (sec)A m p l i t u d e得出在单位阶跃负反馈下使得闭环系统稳定的K 值的范围:K>28.74252.2绘制下面系统的根轨迹曲线)10)(10012)(1()12()(2+++++=s s s s s K s G 程序:G=tf([1 12],[1 23 242 1220 1000]); rlocus (G); %绘制系统的根轨迹[k,r]=rlocfind(G) %确定临界稳定时的增益值k 和对应的极点r G_c=feedback(G,1); %形成单位负反馈闭环系统 step(G_c) %绘制闭环系统的阶跃响应曲线-60-50-40-30-20-100102030-50-40-30-20-1001020304050Root LocusReal AxisI m a g i n a r y A x i s01234560.0020.0040.0060.0080.010.012Step ResponseTime (sec)A m p l i t u d e得出在单位阶跃负反馈下使得闭环系统稳定的K 值的范围: K>1.1202e+032.3绘制下面系统的根轨迹曲线)11.0012.0)(10714.0()105.0()(2++++=s s s s s K s G 程序:G=tf([5 100],[0.08568 1.914 17.14 100 0]); rlocus (G); %绘制系统的根轨迹[k,r]=rlocfind(G) %确定临界稳定时的增益值k 和对应的极点r G_c=feedback(G,1); %形成单位负反馈闭环系统step(G_c) %绘制闭环系统的阶跃响应曲线-60-50-40-30-20-10010203040-60-40-200204060Root LocusReal AxisI m a g i n a r y A x i s012345670.10.20.30.40.50.60.70.80.91Step ResponseTime (sec)A m p l i t u d e得出在单位阶跃负反馈下使得闭环系统稳定的K 值的范围:K> 7.8321根据实验结果分析根轨迹的绘制规则:⑴绘制根轨迹的相角条件与系统开环根轨迹增益 值的大小无关。
《模块化自控原理》线性系统的根轨迹分析实验模块化自控原理中的线性系统的根轨迹分析实验是探究线性系统的稳定性和动态特性的一种常用方法,通过实验观测和分析系统的根轨迹,可以得到系统的传递函数以及系统的稳定性等重要信息。
下面是对该实验的详细说明和分析。
1.实验目的1.1理解线性系统的根轨迹概念及其重要性;1.2学习使用根轨迹法进行系统的稳定性和动态特性分析;1.3掌握根轨迹分析实验的具体步骤;1.4提高实验操作和数据处理的能力。
2.实验原理2.1根轨迹的概念根轨迹是以参数变化为基础的线性系统稳定性和动态特性的分析方法之一、根轨迹是指在参数变化的范围内,系统传递函数极点的轨迹,可以用来判断系统的稳定性、响应特性和动态响应快慢等重要指标。
2.2根轨迹的画法根轨迹的画法需要先确定系统的开环传递函数,然后通过对传递函数进行拆项和配平,求解极点的位置。
根轨迹的位置可以通过极点的实部和虚部来表示,根据虚轴对称性和极点与零点的关系,可以画出根轨迹的大致形状和方向。
2.3根轨迹分析的应用根据根轨迹的形状、分布和方向可以判断系统的稳定性和动态特性:-根轨迹在左半平面则系统稳定;-根轨迹与虚轴交点奇数个则系统不稳定;-根轨迹的分布越往左上角或右上角,系统的动态特性越好。
3.实验装置和器材3.1实验装置数字控制系统实验台、计算机、示波器、信号发生器、数模转换器等。
3.2实验器材电脑、电源线、连接线、示波器探头等。
4.实验步骤4.1连接实验装置将数字控制系统实验台与计算机、示波器、信号发生器和数模转换器等设备进行连接。
4.2系统参数调整设置合适的实验参数,包括采样频率、控制周期、信号幅值等。
4.3系统根轨迹绘制在计算机上运行相应的根轨迹绘制软件,根据实验所给的开环传递函数和稳定域范围,绘制系统的根轨迹。
4.4根轨迹分析根据根轨迹的形状、位置和分布等信息,分析系统的稳定性和动态特性,并给出相应的结论和解释。
4.5记录实验数据记录实验中所绘制的根轨迹和分析结果,包括根轨迹的形状、交点、分布等重要特征。
实验三 线性系统的根轨迹分析09电信 任旭乐 20095042046一、 实验目的1.熟悉Matlab 的基本操作;2.掌握利用Matlab 函数实现系统根轨迹的绘制及设计的方法。
3.能够根据所得结果对系统进行性能分析。
二、 实验内容1、已知单位负反馈系统的开环传递函数为: (1)试画出K=0 →∞时的闭环系统根轨迹; (2)求出临界时的K 值及闭环极点; (3)求出使系统稳定的K 值的区间; (4)利用Matlab 函数将剩余的根求出。
程序: a=[1 0]; b=[0.05 1]; c=[0.05 0.2 1]; d=conv(a,b); e=conv(c,d); G=tf([1],e); figure(1); rlocus(G);[k,pole]=rlocfind(G);解:(1)根轨迹如图所示。
(2)临界时k=4.62;闭环极点p=0.336+4.34j (3)由图可知:0<k<4.62时系统稳定。
Root LocusReal AxisI m a g i n a r y A x i s-80-60-40-200204060-60-40-20204060System: G Gain: 4.62P ole: 0.336 + 4.34i Damping: -0.0772Overshoot (%): 128Frequency (rad/sec): 4.35System: G Gain: 0P ole: 0Damping: -1Overshoot (%): 0Frequency (rad/sec): 0System: GGain: 8.5P ole: -19.5Damping: 1Overshoot (%): 0Frequency (rad/sec): 19.5根轨迹2()(0.051)(0.050.21)KG s s s s s =+++2、已知单位负反馈系统的开环传递函数为:(1)试画出K=0 →∞时的闭环系统根轨迹;(2)找出ζ=0.707附近的点,绘制出其相应的单位阶跃响应曲线。