《对轮找中心》
- 格式:doc
- 大小:143.00 KB
- 文档页数:5
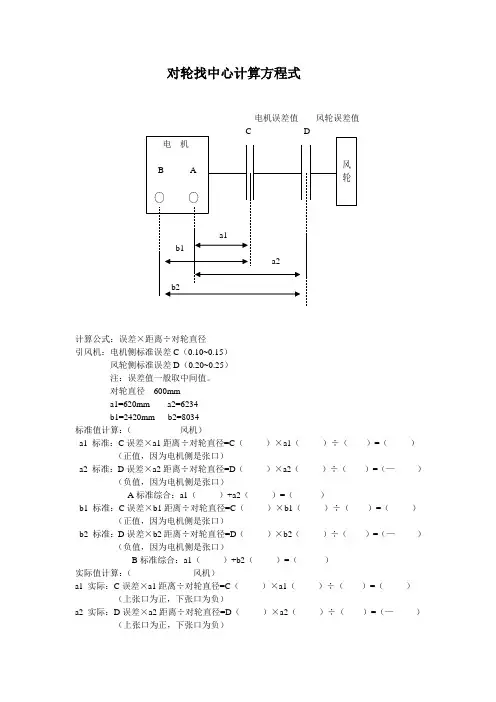
风轮对轮找中心计算方程式电机误差值 风轮误差值D计算公式:误差×距离÷对轮直径引风机:电机侧标准误差C (0.10~0.15) 风轮侧标准误差D (0.20~0.25) 注:误差值一般取中间值。
对轮直径 600mm a1=620mm a2=6234 b1=2420mm b2=8034 标准值计算:( 风机)a1 标准:C 误差×a1距离÷对轮直径=C ( )×a1( )÷( )=( ) (正值,因为电机侧是张口)a2 标准:D 误差×a2距离÷对轮直径=D ( )×a2( )÷( )=(— )(负值,因为电机侧是张口)A 标准综合:a1( )+a2( )=( )b1 标准:C 误差×b1距离÷对轮直径=C ( )×b1( )÷( )=( ) (正值,因为电机侧是张口)b2 标准:D 误差×b2距离÷对轮直径=D ( )×b2( )÷( )=(— )(负值,因为电机侧是张口)B 标准综合:a1( )+b2( )=( ) 实际值计算:( 风机)a1 实际:C 误差×a1距离÷对轮直径=C ( )×a1( )÷( )=( ) (上张口为正,下张口为负)a2 实际:D 误差×a2距离÷对轮直径=D ( )×a2( )÷( )=(— )(上张口为正,下张口为负)A实际综合:a1()+a2()=()b1 实际:C误差×b1距离÷对轮直径=C()×b1()÷()=()(上张口为正,下张口为负)b2 实际:D误差×b2距离÷对轮直径=D()×b2()÷()=(—)(上张口为正,下张口为负)B实际综合:b1()+b2()=()A角垫片调整:A标准综合()+A实际综合()=()B角垫片调整:B标准综合()+B实际综合()=()。
对轮找中心计算公式
【实用版】
目录
1.对轮找中心计算公式的背景和意义
2.对轮找中心计算公式的定义和原理
3.对轮找中心计算公式的应用实例
4.对轮找中心计算公式的优缺点分析
5.对轮找中心计算公式的未来发展趋势
正文
一、对轮找中心计算公式的背景和意义
随着科技的发展,各种机械设备和传动系统在工业生产中扮演着越来越重要的角色。
对轮找中心计算公式就是在这样的背景下应运而生,它的出现解决了对轮传动系统中的关键问题,提高了设备的运行效率和稳定性。
二、对轮找中心计算公式的定义和原理
对轮找中心计算公式,顾名思义,就是寻找两个对轮之间的中心点,使得对轮在传动过程中的误差最小。
其原理主要基于力学平衡,通过计算得出两个对轮的中心点,以实现精确传动。
三、对轮找中心计算公式的应用实例
在实际应用中,对轮找中心计算公式被广泛应用于各种传动系统,如齿轮传动、皮带传动等。
通过使用该公式,可以有效提高传动精度,降低设备故障率,提高生产效率。
四、对轮找中心计算公式的优缺点分析
对轮找中心计算公式的优点在于其较高的传动精度和稳定性,使得设备在运行过程中更加可靠。
然而,它也存在一定的局限性,例如计算过程
较为复杂,需要专业人员进行操作。
五、对轮找中心计算公式的未来发展趋势
随着科技的不断进步,对轮找中心计算公式在未来的发展趋势将更加便捷、智能化。
例如,通过计算机软件进行辅助计算,可以大大简化操作过程,提高计算效率。
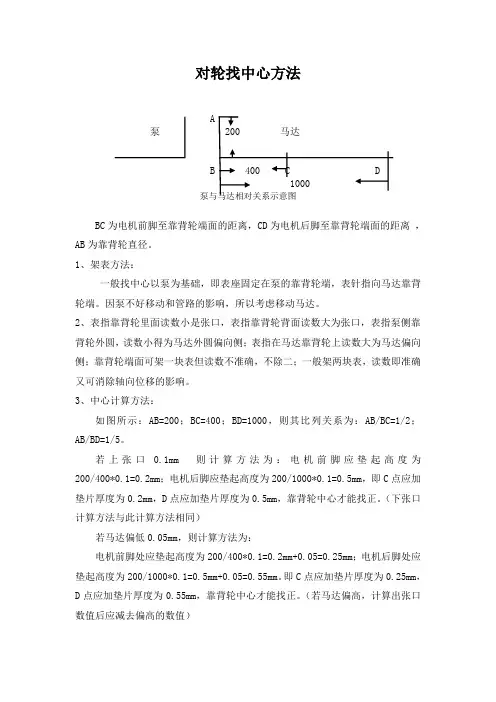
对轮找中心方法
A
泵 200 马达
B 400
C D
1000
泵与马达相对关系示意图
BC为电机前脚至靠背轮端面的距离,CD为电机后脚至靠背轮端面的距离,AB为靠背轮直径。
1、架表方法:
一般找中心以泵为基础,即表座固定在泵的靠背轮端,表针指向马达靠背轮端。
因泵不好移动和管路的影响,所以考虑移动马达。
2、表指靠背轮里面读数小是张口,表指靠背轮背面读数大为张口,表指泵侧靠背轮外圆,读数小得为马达外圆偏向侧;表指在马达靠背轮上读数大为马达偏向侧;靠背轮端面可架一块表但读数不准确,不除二;一般架两块表,读数即准确又可消除轴向位移的影响。
3、中心计算方法:
如图所示:AB=200;BC=400;BD=1000,则其比列关系为:AB/BC=1/2;AB/BD=1/5。
若上张口0.1mm 则计算方法为:电机前脚应垫起高度为200/400*0.1=0.2mm;电机后脚应垫起高度为200/1000*0.1=0.5mm,即C点应加垫片厚度为0.2mm,D点应加垫片厚度为0.5mm,靠背轮中心才能找正。
(下张口计算方法与此计算方法相同)
若马达偏低0.05mm,则计算方法为:
电机前脚处应垫起高度为200/400*0.1=0.2mm+0.05=0.25mm;电机后脚处应垫起高度为200/1000*0.1=0.5mm+0.05=0.55mm。
即C点应加垫片厚度为0.25mm,D点应加垫片厚度为0.55mm,靠背轮中心才能找正。
(若马达偏高,计算出张口数值后应减去偏高的数值)。
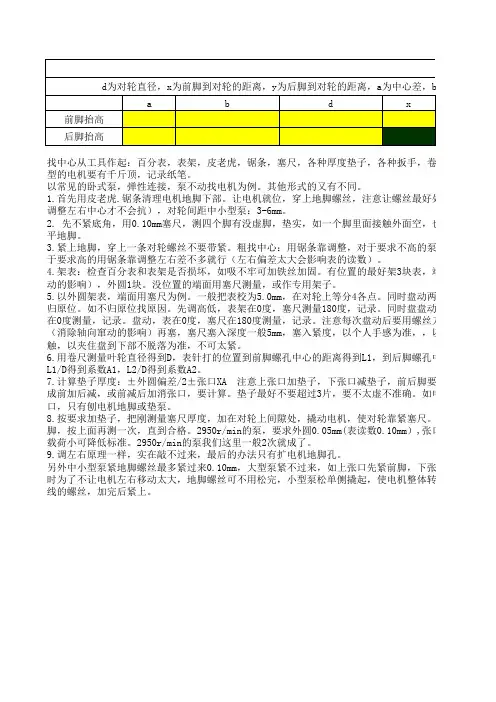
找中心从工具作起:百分表,表架,皮老虎,锯条,塞尺,各种厚度垫子,各种扳手,卷尺型的电机要有千斤顶,记录纸笔。
以常见的卧式泵,弹性连接,泵不动找电机为例。
其他形式的又有不同。
1.首先用皮老虎.锯条清理电机地脚下部。
让电机就位,穿上地脚螺丝,注意让螺丝最好处在螺孔中心(调整左右中心才不会抗),对轮间距中小型泵:3-6mm。
2. 先不紧底角,用0.10mm塞尺,测四个脚有没虚脚,垫实,如一个脚里面接触外面空,也要垫实外面,平地脚。
3.紧上地脚,穿上一条对轮螺丝不要带紧。
粗找中心:用锯条靠调整,对于要求不高的泵到这里就可以于要求高的用锯条靠调整左右差不多就行(左右偏差太大会影响表的读数)。
4.架表:检查百分表和表架是否损坏,如吸不牢可加铁丝加固。
有位置的最好架3块表,端面2块(消除动的影响),外圆1块。
没位置的端面用塞尺测量,或作专用架子。
5.以外圆架表,端面用塞尺为例。
一般把表校为5.0mm,在对轮上等分4各点。
同时盘动两对轮一圈,看归原位。
如不归原位找原因。
先调高低,表架在0度,塞尺测量180度,记录。
同时盘盘动,表在180度,在0度测量,记录。
盘动,表在0度,塞尺在180度测量,记录。
注意每次盘动后要用螺丝刀把对轮间撬一(消除轴向窜动的影响)再塞,塞尺塞入深度一般5mm,塞入紧度,以个人手感为准,,以刚刚感觉有点触,以夹住盘到下部不脱落为准,不可太紧。
6.用卷尺测量叶轮直径得到D,表针打的位置到前脚螺孔中心的距离得到L1,到后脚螺孔中心的距离得到L1/D得到系数A1,L2/D得到系数A2。
7.计算垫子厚度:±外圆偏差/2±张口XA 注意上张口加垫子,下张口减垫子,前后脚要同样加减,个成前加后减,或前减后加消张口,要计算。
垫子最好不要超过3片,要不太虚不准确。
如电机没垫子,下口,只有刨电机地脚或垫泵。
8.按要求加垫子,把刚测量塞尺厚度,加在对轮上间隙处,撬动电机,使对轮靠紧塞尺。

汽轮发电机轴系找中心总结1、以对轮顶部为支点(假设这点不动)作转动,这样消除张口值时,不会产生错口,然后看错口值是多少,利用相式三角型关系算出数值,并画出图,是上还是往下动,在把错口值也画上,是上还是下,有图后一目了然就知道是往哪方向动了,动的量是两数的和或差,方向相同相加,相反相减,谁大跟随的方向动。
上下张口就按水平画图,左右张口就按竖值画图。
图画出来后很直观,也不会错的。
也可以用AUTO CAD放样,哪样也很准确。
对轮直径/张口值=1支承点距圆心距离/△X1=2支承点距圆心距离/△X2=1支承点与2支承点距离/(△X1-△X2)轴瓦垫块调整图解轴瓦移动量:abααa轴瓦抬高或降低: b=±a ·cos θ 轴瓦平移量:α轴瓦右移或左移: d=±c ·sin θ 0 30 45 60 72 80 90 sin θ 0 0.5 0.707 0.866 0.95 0.98 1 cos θ10.8660.7070.50.310.174隔板找中图解隔板找中心图解:隔板横向中心的偏差可以通过抬高一侧挂耳,降低另一侧挂耳的方法来调整的,原因可以从图中清楚的看出。
隔板的原位置是HFD,它的中心是B。
当隔板右侧挂耳抬高L值时,即左侧挂耳降低L值时,隔板的位置变为GFC,中心移至A。
就是说隔板以F为圆心转动了一个很小的角度,使隔板中心向左侧移动了AB值。
由于移动量很小,因而可以近似地把FAB、AHG和BDC看作三个直角三角形,且DC=HG=L,显然,这三个三角形全等。
故GH=CD=AB=L,即隔板中心向左移动了L值。
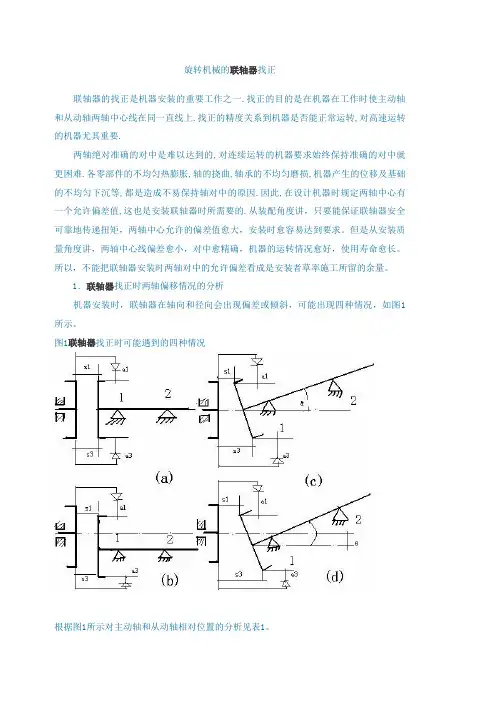
旋转机械的联轴器找正联轴器的找正是机器安装的重要工作之一.找正的目的是在机器在工作时使主动轴和从动轴两轴中心线在同一直线上.找正的精度关系到机器是否能正常运转,对高速运转的机器尤其重要.两轴绝对准确的对中是难以达到的,对连续运转的机器要求始终保持准确的对中就更困难.各零部件的不均匀热膨胀,轴的挠曲,轴承的不均匀磨损,机器产生的位移及基础的不均匀下沉等,都是造成不易保持轴对中的原因.因此,在设计机器时规定两轴中心有一个允许偏差值,这也是安装联轴器时所需要的.从装配角度讲,只要能保证联轴器安全可靠地传递扭矩,两轴中心允许的偏差值愈大,安装时愈容易达到要求。
但是从安装质量角度讲,两轴中心线偏差愈小,对中愈精确,机器的运转情况愈好,使用寿命愈长。
所以,不能把联轴器安装时两轴对中的允许偏差看成是安装者草率施工所留的余量。
1.联轴器找正时两轴偏移情况的分析机器安装时,联轴器在轴向和径向会出现偏差或倾斜,可能出现四种情况,如图1所示。
图1联轴器找正时可能遇到的四种情况根据图1所示对主动轴和从动轴相对位置的分析见表1。
表1联轴器偏移的分析2.测量方法安装机器时,一般是在主机中心位置固定并调整完水平之后,再进行联轴器的找正。
通过测量与计算,分析偏差情况,调整原动机轴中心位置以达到主动轴与从动轴既同心,又平行。
联轴器找正的方法有多种,常用的方法如下:(1)简单的测量方法如图2所示。
用角尺和塞尺测量联轴器外圆各方位上的径向偏差,用塞尺测量两半联轴器端面间的轴向间隙偏差,通过分析和调整,达到两轴对中。
这种方法操作简单,但精度不高,对中误差较大。
只适用于机器转速较低,对中要求不高的联轴器的安装测量。
图2 角尺和塞尺的测量方法(2)用中心卡及塞尺的测量方法找正用的中心卡(又称对轮卡)结构形式有多种,根据联轴器的结构,尺寸选择适用的中心卡,常见的结构图3 所示。
中心卡没有统一规格,考虑测量和装卡的要求由钳工自行制作图3常见对轮卡型式(a)用钢带固定在联轴器上的可调节双测点对轮卡(b)测量轴用的不可调节的双测点对轮卡(c)测量齿式联轴器的可调节双测点对轮卡(d)用螺钉直接固定在联轴器上的可调节双测点对轮卡(e)有平滑圆柱表面联轴器用的可调节单测点对轮卡(f)有平滑圆柱表面联轴器用的可调节双点对轮卡利用中心卡及塞尺可以同时测量联舟轴器的径向间隙及轴向间隙,这种方法操作简单,测量精度较高,利用测量的间隙值可以通过计算求出调整量,故较为适用。
对轮找中心计算公式轮找中心计算公式是一种常见的算法,用于确定一个集合中的元素索引。
该算法通常用于实现轮询负载均衡,其中各个服务器按照特定规则依次处理请求。
下面是对轮找中心计算公式的详细描述。
轮找中心计算公式,也称为Round Robin算法,是一种简单的负载均衡算法。
它的目的是通过循环选择算法,将请求均匀地分发给一组服务器或处理单元。
在使用轮找中心计算公式时,我们首先需要确定参与轮询的服务器或处理单元数量,假设有n个。
每当一个请求到达时,通过以下计算公式确定选择的服务器或处理单元的索引:index = (current_index + 1) mod n其中,current_index是上一次请求所选择的服务器或处理单元的索引,n是服务器或处理单元的数量。
mod运算符表示取余操作,确保索引始终在合法范围内。
通过这种计算公式,每个请求将依次选择下一个服务器或处理单元。
当请求达到最后一个服务器或处理单元后,下一个请求将重新从第一个服务器或处理单元开始。
这样,所有服务器或处理单元将接收近似相等数量的请求,实现了负载均衡。
轮找中心计算公式的优点是简单易懂、易实现,并能够在服务器集群中均衡分发请求。
然而,它也存在一些缺点,例如无法根据服务器或处理单元的实际负载情况进行动态调整,可能导致一些服务器过载而其他服务器空闲。
此外,如果服务器或处理单元的响应时间不均衡,可能会导致某些请求的延迟增加。
总之,轮找中心计算公式是一种常见的负载均衡算法,适用于简单的集群环境。
它可以通过循环选择下一个服务器或处理单元,实现请求的均衡分发。
然而,在实际应用中,我们需要根据具体需求选择适合的负载均衡策略,以确保系统的稳定性和性能。
对轮找中心,是一项需要细心,耐心的工作,在找中心之前,首先要将对轮,基础地脚螺丝平面及垫片清理干净,不得有毛刺,倒角的缺陷。
然后用吸铁底座将两块百分表分别固定在另一端对轮的径向和轴向。
将百分表的读数调至中间数,记下原始读数,然后旋转对轮至90度,180度,270度,最后再转回起始位置,分别读出表中的读数,然后运用公式分别算出径向和轴向的误差,根据数值来加减垫片,最后将基础四角螺丝紧固,再一次架上百分表,旋转对轮,验证一下读数,是否在合格数值之内。
至此,对轮找中心已基本完成,最后一项工作是将对轮罩盖住。
关于对汽轮机检修工作中用表格计算模拟找中心的几个的问题汽轮发电机组大修时,往往要对其轴系的各个对轮中心作检查和调整(俗称对轮找中心)。
在此过程中,一般是先经过大量的手工计算,决定一个调整方案,然后一次次试调、测量,使调整结果逐渐达到对轮中心的偏差容许值,因而耗费大量的时间和人力。
而且在找中心的时候需要考虑个个汽封洼窝中心和油封中心,但是在实际的工作,很少有人真正的去计算,只是看个大概的估算值.这样有的时候一次计算的失误可能导致大量工人的重复劳动,以至于延长工期.所以我有个设想就是用电子表格模拟整个找中心过程的数据计算,从而得出最终结果.可以提出几个方案,然后通过计算得出一个最合适和工作量最小的方案.在一般大修中主要用到计算的步骤有:汽轮机的对轮找中心、轴瓦的移动量、洼窝中心调整隔板.一、表格模拟对轮找中心的表格既然要用表格模拟计算找中心,那么应该首先把他的计算原理推导出来那么就以我们厂200WM 的汽轮机轴系为例计算推导找中心的过程.在对轴系找中心前要对轴系有个假设:轴系是一条直线,所有对轴系的移动都是线性的.上张口为正,下张口为负.高于标准对轮(每对对轮左边对轮为标准对轮)为正,低于标准对轮为负.假如以高压转子为准依次向后找中心则: 1.首先要消除张口a 1:若需要预留张口或圆周的那么使,张口的正负号不变,预留上张口为正,下张口为负 ,预留圆周也是高出标准对轮为正,低于标准对轮为负.200MW轴系图高压转子中压转子低压转子发电机转子1瓦假瓦2瓦3瓦4瓦5瓦6瓦7瓦D 1D 2D 3张口 a 1圆周 b 1张口 a 2 移动后a 2 '圆周 b 2 b 2'张口 a 3 移动后a 3'圆周 b 3 b 3'a1=原有张口减去预留张口 b1=原圆周减去预留圆周 先移动3瓦:22111L x D a = 则 11221D a L x ⨯=则由于移动3瓦使高中对轮圆周变化211221L ZL x -= 则221211L x L Z ⨯-=把1x 代入得11211D aL Z ⨯-= (由于靠近三瓦的对轮变化跟抬起轴瓦的方向相反所以用负号)由于移动3瓦中低对轮增加张口变化:21211D a D a = 则 11212D a D a ⨯= 圆周变化22231211L L Z D a +-= 11232212)(a D L L Z ⨯+-= (由于3瓦的移动方向与靠近三瓦对轮的圆周变化方向相同,但是低压对轮以中压对轮为标准,所以它们的圆周变化与移动变化方向是相反的所以用负号)消除圆周1b (消除圆周则瓦的移动方向与圆周相反)则: 需要移动2瓦2h =1121111)()()(D a L b Z b ⨯+-=-+- 需要移动3瓦3h =+1x 1121111)()()(D a L b Z b ⨯+-=-+-+1x =1122D a L ⨯+11211)(D aL b ⨯+- 则移动后的中低对轮张口为2a '=2a +11212D a D a ⨯=+2a 圆周为2b '=2b +-12Z 2h =2b 112322)(a D L L ⨯+-11211D a L b ⨯-+=11221)(D a L b b ⨯-+这种计算方法的好处是可以一次性的先把各对轮中心先找出来然后,可以先从任意一段轴开始调整,表格会自动从左向右依次消除张口和圆周后显示出轴瓦的移动量.由于调整一个对轮后相关对轮也发生变化,那么这种计算方法也计算出了变化对轮发生变化后的实际张口和圆周.这个表格可以为真正找中心提供参考依据为决策者节省大量的计算时间.二、 用表格模拟移动轴瓦后看相应轴的对轮的圆周和张口变化由于在大修中各个缸的通流间隙变化不一样,有的通流径向间隙合适,有的偏差很大,比如在本次大修中中压通流间隙机侧间隙明显小于炉侧间隙.那么如果首先移动调整中压转子后符合径向通流间隙后,然后再调整其他的转子是否能减小工作量呢?或者这个表格也可以实现首先调整各段轴的通流间隙然合适后看各个对轮的圆周和张口是多少呢?这个表格可以模拟调整转子后对张口和圆周的影响.(计算原理如下)对轮1对轮2对轮1张口a1、圆周b1、直径D1,对轮2张口a2、圆周b2、直径D2,若移动A瓦y、移动B瓦x。
对轮找中心及转子找平衡 A.1对轮找中心用磁力表座进行两点测量法 A.1.1.1准备百分表和磁力表座各三块,塞尺、大锤、铜棒、A.1.1.2 直尺、千斤顶及专用销子和扳手等。
对轮应清扫干净,端面、外径应平整。
台板垫片要清A.1.1.3 扫干净,地脚螺栓应灵活。
电动机就位后,用直尺测量检查两对轮左右中心基本A.1.1.4 一致,拧紧地脚螺栓,对齐对轮记号,用专用销子或对轮螺丝二只将对轮连接好。
装百分表,各表相隔1800,面设B,、B,,两块表,圆A.1.1.5 表设一块A表。
盘动转子一周,检查表座是否稳固,表杆无松动碰撞A.1.1.6 现象,表针指示正确。
按风机旋转方向缓慢盘动转子,每转900记录一次,记A.1.1.7 所示J.2录方法参照图A找中心记录中心偏差计算 A.1.1.8平面a)上下张口 b=B-B (mm) 42左右张口 b=B-B (mm)31圆周e)高低位移 a=A-A/2 (mm) 31左右位移a=A-A/2 (mm)42调整中心偏计算f)D为对轮直径 b为面偏差值前脚调整量=±L/D×b±a/2(mm) 1后脚调整量=±L/D×b±a/2(mm)2为计算方便请参照图J.3注:B转子找中心找中心的要求及注意事项百分表指示正确,动作灵活,测点光滑平整,读数正A.1.1.9 确。
百分表座架安装牢固,表的触头与被测点表面垂直。
A.1.1.10 对轮销子无卡涩,盘动转子用力均匀。
用塞尺找正时,塞尺塞入不易过大,用力适当,同时A.1.1.11 塞进塞尺的片数不超过三片(不足用塞板),薄的放中间,塞尺不应有折纹。
大型设备在左右调整轴承座时要装表监视,用专用螺A.1.1.12 栓调整,用大锤时一定用铜棒垫在轴承座上方可锤击,上下调整时注意电机轴瓦、油挡、风挡及有关部件勿损坏。
.根据风机和偶合器参数,可考虑由于受热空气温度之A.1.1.13 差及偶合器温度较高等条件的影响,电机和风机转子都应比偶合器高0.05mm~0.10mm。
对轮找正的操作流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor. I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!1. 准备工作确保对轮和轴的表面清洁,无油污、灰尘和杂物。
检查对轮和轴的尺寸是否匹配,确保它们能够正确安装。
找中心
石家庄热电厂八期
(ABB)
找中心目录
1:找中心目的 2:应用范围说明 3:可应用的文件 4:所需的文件5:缺陷种类 6:检查 7:校正 8:允许偏差1:找中心的目的:不同的转子在相连时不允许存在弯曲,避免因弯曲产生的附加应力在运行中产生交变的弯曲应力,那么,联轴器上应没有弯曲和应力作用。
2:应用范围
所有使用PSUT技术和由多个转子组成的汽轮机都使用,不适用于齿轮传动机组高压汽轮机机组。
3:能使用的文件
HTGD 630 075 MA-摩擦片联轴器 94
HTGD 630 095 MA-膨胀套筒式联轴器
HTGD 457 964 实验合格证:找中心
4:所需的文件
--装配方案 --转子的偏差曲线 --实验数据HTGD 457 964“找中心”
5:缺陷种类
在组装过程中,轴承在垂直和水平方向的偏差引起轴线不完全重合(角偏差),即:联轴器的两端面不完全平行。
见图1:
制造时允许的公差引起不垂直(偏心),因此联轴器端面不完全垂直于轴。
见图2:
测量的两个偏差相加(联轴器沿圆周方向间隙差值)。
图1 图2 图3 图4
如果转子装有双轴承,不精确的同轴性是由于轴承在安装中不准确的水平、垂直位置产生的,即:如果在断开情况下,着两个转子有相对的中心偏差,见图3 有双推力盘的转子见图4:6:检查
6.1获得精确测量结果的前提条件需遵守以下几点要求:
.检查检测时,转子必须放置于瓦座上,以便弯曲与运行工况相吻合,不能用辅助轴承来校正.
计算基础的弹性变形,对钢制结构尤为重要,在这种基础上产生的变形是10—20um/T
.弹力负载基础的弹力应考虑运行工况
.计算凝结器运行状态的重量
.在扣缸前应进行最后一次检查,例如: 安装完了入口及入口闸门连接部件.
6.2检查平行度
有角偏差时,两个联轴器法兰不完全平行,见图5为了确定偏差值,测量联轴器上、下(如有可能)、左、右(00、900、1800、2700)。
并记录这些测量值。
图5 图6 图7
名称解释:
a 1、a
2
=联轴器间隙测量值∆a=a
2
-a
1
=联轴器间隙(水平、垂直方向)
S 1=∆a/d×L
1
=轴承的调整量 L
1
=轴瓦到联轴器端面距离
d=联轴器的直径
6.3检查同轴性(有两个轴承的转子)
如果将这两个转子断开,那么,一个相对于另一个会产生位移见图6这是转子的中心存在不恰当的同轴性,为了确定这个偏差值,把百分表安装在两联轴器法兰上,转动转子,测量四个不同位置(00、900、1800、2700)。
6.4检查轴的中心偏差(不完全垂直)
如果这两个连接的转子有相对位移偏差即中心偏差见图7,为了确定偏差位置,需要安装两块或三块百分表在联轴器的外圆上,测量每个联轴器的法兰并记录结果。
6.5检查推力轴承磨损
测量推力盘尺寸并记录平行度见图4推力轴承的磨损: ∆L=L
1-L
∆L=推力轴承磨损
L
1
=靠背轮距离(自由状态)
L
=相对距离(推力轴承面自由状态)
L'
1
=轴承被抬起时靠背轮距离
7:校准
7.1轴向线
有着圆筒形轴瓦或4片垫铁的全速汽轮机组已装配好,即,不需要水平或垂直的校正。
有着三片垫铁的中速汽轮机组已在Y和Z方向进行了校正,当需调整或重新调整密封套尺寸时,需要考虑校正值。
原因:轴承座的胀差较小引起相对小的位移。
7.2径向校准(靠背轮中心)
用精密的仪器去调整已安装好辅助轴承的靠背轮的水平与垂直方向的位置是为了保证当两个靠背轮联在一起时靠背轮中心不变,通过测量靠背轮在脱开时的数值来检查靠背轮错开的可能性见6.3节。
7.3轴向校准(平行度检查)
起点:
--测量靠背轮间隙保证两个靠背轮兰盘同心;
--靠背轮间隙“a”不大于2mm;
--安全起见,安装两个靠背轮螺丝和千斤顶,以便防止两个靠背轮相对位置发生变动,但是,不能用力插入产生扭力;
--转子被调成一条直线在最高点标为靠背轮的0位;
--在测量期间,辅助轴承可以去掉或降低。
图8 图9
步骤:
--第一次测量前需转动转子2—3周,以便靠背轮轮缘可以自由稳定的定心;
--当测量间隙时,断开顶轴油泵(如果已安装的话);
--用精度为1/100mm的百分表测量间隙;
--测量靠背轮间隙“a”,首先在高点的“0”位,然后,依次测量上下左右并记录结果;--旋转转子900,重复进行测量;
--进行四次连续测量工作,每次测定四个数值。
图11:平均值
测定: (以图11为例)
水平方向的角偏差=水平方向的联轴器间隙:
左侧和右侧的联轴器间隙平均值的差值=△a
hor
△ a
hor =a
links
-a
rechts
=1.40mm-1.20mm=0.20mm
联轴器左侧间隙是0.20mm。
转子必须重新找中心,因为根据第八节规定结果值是不允许的。
通过水平位移s
1hor =△a
hor
/d×L
1
校正后,看图12(俯视图),联轴器的左侧和右侧间隙就相等了。
图12 图13 垂直方向的角偏差=垂直方向的联轴器间隙:
联轴器底部和顶部的间隙平均值的差值=△a
vert
△ a
vert =a
unten
-a
oben
=1.38mm-1.22mm=0.16mm
联轴器的底部间隙是0.16mm。
转子必须重新找中心,因为根据第八节规定结果值是不允许的。
通过垂直位移s
1vert =△a
vert
/d×L
1
校正后,看图13(侧视图),联轴器的顶部和底部间隙就相等了。
7.4校正推力轴承的磨损
过程如下:
● 推力轴承旁边的联轴器在断开位置,转子支撑在辅助轴承上。
● 测量推力盘并记录它的平行度。
● 校正联轴器完全平行并不受任何弯矩(辅助轴承以拿走并且联轴器以安装)。
● 再次测量推力盘的平行度。
● 如果测量值超过允许偏差或平行度公差0.05mm ,把轴承抬起1.0mm 。
● 再次坚持检查推力盘。
如果ΔL 在允许公差范围内,另外检查由于轴承位移影响的下列项目。
-油挡 -密封套间隙 -动静间隙的分布 -超速实验的测试装置 -其他装置 7.4校正变化的评定 7.5.1操作步骤
在世际操作中顺序可能会有所变化,按如下所述评定变化:
● 将实际转子位置与原始状态记录位置相比较来确定允许的变化量。
● 相邻两个轴承位移变化的影响评定。
● 下列轴承降低是允许的,在汽轮机运行期间不必要重新计算:单缸汽轮机=2mm ● 如果轴承在初装期间被抬高以便防止汽轮机推力盘出现超出许可范围的倾斜,这个抬高的数
值应减去或加上允许的数值。
● 如果相对位移超过2mm ,生产技术科应检查转子和联轴器螺栓的应力并有必要参加初装。
● 当紧固联轴器螺栓时,由于推力盘下沉,联轴器是不受力的,为了校正推力盘平行度偏差,
应对联轴器间隙“Δa ”进行调整。
当ΔL>0.05mm 时,联轴器是受力的。
此时技术科必须负责提供联轴器间隙“Δa ”的调整量。
7.5.2大修
大修时通过测量联轴器间隙检查调整量。
必须遵守第八章所述允许的联轴器间隙,如果超过允许值就要重新调正。
8 允许偏差
8.1初装时的联轴器间隙(△a hor ,△a vert )
8.2 大修时的联轴器间隙(△a hor ,△a vert )
1) 根据7.2节选择△a hor ,△a vert
8.3推力轴承下沉值ΔL ≤0.05mm 。