控制工程基础3-第2章 (数学模型1:微分方程,传递函数)
- 格式:ppt
- 大小:1.54 MB
- 文档页数:47
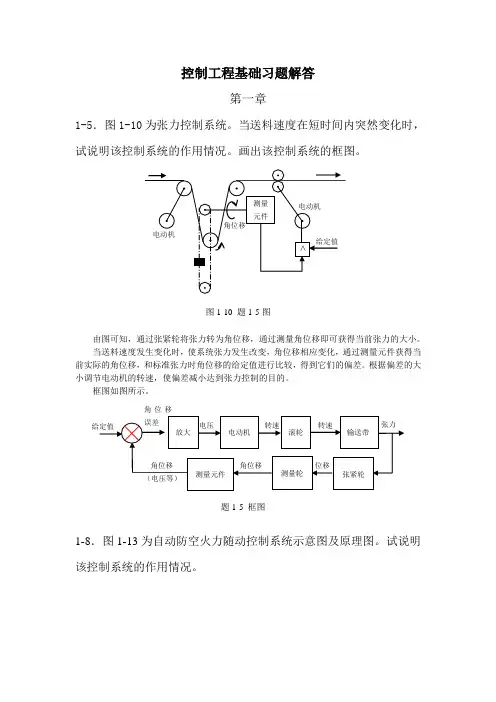
控制工程基础习题解答第一章1-5.图1-10为张力控制系统。
当送料速度在短时间内突然变化时,试说明该控制系统的作用情况。
画出该控制系统的框图。
由图可知,通过张紧轮将张力转为角位移,通过测量角位移即可获得当前张力的大小。
当送料速度发生变化时,使系统张力发生改变,角位移相应变化,通过测量元件获得当前实际的角位移,和标准张力时角位移的给定值进行比较,得到它们的偏差。
根据偏差的大小调节电动机的转速,使偏差减小达到张力控制的目的。
框图如图所示。
1-8.图1-13为自动防空火力随动控制系统示意图及原理图。
试说明该控制系统的作用情况。
题1-5 框图电动机给定值角位移误差张力-转速位移张紧轮滚轮输送带转速测量轮测量元件角位移角位移(电压等)放大电压测量 元件>电动机角位移给定值电动机图1-10 题1-5图该系统由两个自动控制系统串联而成:跟踪控制系统和瞄准控制系统,由跟踪控制系统获得目标的方位角和仰角,经过计算机进行弹道计算后给出火炮瞄准命令作为瞄准系统的给定值,瞄准系统控制火炮的水平旋转和垂直旋转实现瞄准。
跟踪控制系统根据敏感元件的输出获得对目标的跟踪误差,由此调整视线方向,保持敏感元件的最大输出,使视线始终对准目标,实现自动跟踪的功能。
瞄准系统分别由仰角伺服控制系统和方向角伺服控制系统并联组成,根据计算机给出的火炮瞄准命令,和仰角测量装置或水平方向角测量装置获得的火炮实际方位角比较,获得瞄准误差,通过定位伺服机构调整火炮瞄准的角度,实现火炮自动瞄准的功能。
控制工程基础习题解答第二章2-2.试求下列函数的拉氏变换,假定当t<0时,f(t)=0。
(3). ()t et f t10cos 5.0-=解:()[][]()1005.05.010cos 25.0+++==-s s t e L t f L t(5). ()⎪⎭⎫⎝⎛+=35sin πt t f 图1-13 题1-8图敏感 元件定位伺服机构 (方位和仰角)计算机指挥仪目标 方向跟踪环路跟踪 误差瞄准环路火炮方向火炮瞄准命令--视线瞄准 误差伺服机构(控制绕垂直轴转动)伺服机构(控制仰角)视线敏感元件计算机指挥仪解:()[]()252355cos 235sin 2135sin 2++=⎥⎦⎤⎢⎣⎡+=⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛+=s s t t L t L t f L π2-6.试求下列函数的拉氏反变换。


第二章控制系统的数学基础和数学模型基本要求1.掌握拉氏变换、拉氏反变换的定义、定理。
2.了解数学模型的基本概念。
能够运用动力学、电学及专业知识,列写机械系统、电网络系统的微分方程。
3.掌握传递函数的概念、特点,会求传递函数的零、极点。
4.掌握各个典型环节的特点,传递函数的基本形式及相关参数的物理意义。
5.掌握闭环系统中前向通道传递函数、开环传递函数、闭环传递函数的定义及求法。
掌握干扰作用下,系统传递函数的求法和特点。
6.了解传递函数框图的组成及意义;能够根据系统的微分方程,绘制系统传递函数框图,并实现简化,从而求出系统的传递函数。
7.了解相似原理的概念。
本章重点1.拉氏变换定理。
2.列写系统的微分方程。
3.传递函数的概念、特点及求法。
4.典型环节的传递函数。
5.系统的方框图及其化简。
本章难点1.列写系统微分方程。
2.系统的方框图及其化简。
∞ 2.1 拉普拉斯(L a p l a c e )变换2.1.1 拉氏变换概述1.拉氏变换的定义F (s ) = L [ f (t )] = ⎰0f (t )e -std tf (t ):原函数(实域、时间域) F (s ):象函数(s 域、复数域) s :复变量,s=σ+j ωe - st: 拉氏算子j ω[s]σδ ( t )e -atsin ωtcos ωt2.基本函数的拉氏变换1tkttttu ( t ) r ( t )x i ( t ) k 序号原函数 f (t ) 象函数F (s )1 单位脉冲函数 δ (t ) 12单位阶跃函数 1(t ) 1 s 3 K常数k s4t 单位斜坡函数1 s2 5 tnn ! s n +16 e- at1 s + a7sin ωtω s 2 + ω 28cos ωts s 2 + ω 22.1.2 拉氏变换的主要性质1.线性性质设L [f 1(t )]=F 1(s ),L [f 2(t )]=F 2(s ),k 1,k 2为常数 ,则L [k 1 f 1 (t ) + k 2 f 2 (t )] = k 1L [ f 1 (t )] + k 2 L [ f 2 (t )]= k 1F 1 (s ) + k 2 F 2 (s )2.微分性质若L [f (t )]=F (s ),且f (0)=0,(初始条件为零)则L [ df (t )] =sF (s ) dt3.积分定理若L[f(t)]=F(s),且初始条件为零,则L[⎰ f (t )dt ]= 1 F (s)s4.平移定理若L[[f(t)]=F(s),]则L ⎰e-a t f (t)dt =F (s +a)5.初值定理若L[f(t)]=F(s),则f (0+) = limt →0 f (t) = lim s ⋅F (s)s→∞∞6.终值定理若L [f (t )]=F (s ),则有f (∞) = lim t →∞f (t ) = lim s ⋅ F (s )s →07.延迟定理若L [f (t )]=F (s ),对任一正实数a ,则有L [ f (t - a )]= ⎰0f (t - a )e -st d t = e -as F (s )2.1.2 拉氏变换的主要性质1.线性性质设L [f 1(t )]=F 1(s ),L [f 2(t )]=F 2(s ),k 1,k 2为常数 ,则L [k 1 f 1 (t ) + k 2 f 2 (t )] = k 1L [ f 1 (t )] + k 2 L [ f 2 (t )]= k 1F 1 (s ) + k 2 F 2 (s )2.微分性质若L [f (t )]=F (s ),且f (0)=0,(初始条件为零)则L [ df (t )] =sF (s ) dt3.积分定理若L[f(t)]=F(s),且初始条件为零,则L[⎰ f (t )dt ]= 1 F (s)s4.平移定理若L[[f(t)]=F(s),]则L ⎰e-a t f (t)dt =F (s +a)5.初值定理若L[f(t)]=F(s),则f (0+) = limt →0 f (t) = lim s ⋅F (s)s→∞∞6.终值定理若L [f (t )]=F (s ),则有f (∞) = lim t →∞f (t ) = lim s ⋅ F (s )s →07.延迟定理若L [f (t )]=F (s ),对任一正实数a ,则有L [ f (t - a )]= ⎰0f (t - a )e -st d t = e -as F (s )2.1.3拉氏反变换定义:f(t)=L-1[F(s)],将象函数变换成原函数s:复变量F(s):象函数(s 域、复数域)f(t):原函数(实域、时间域)2.2系统的数学模型数学模型就是描述系统的输出、输入与系统本身结构与参数之间的数学表达式。