控制系统的微分方程传递函数
- 格式:pdf
- 大小:3.92 MB
- 文档页数:40


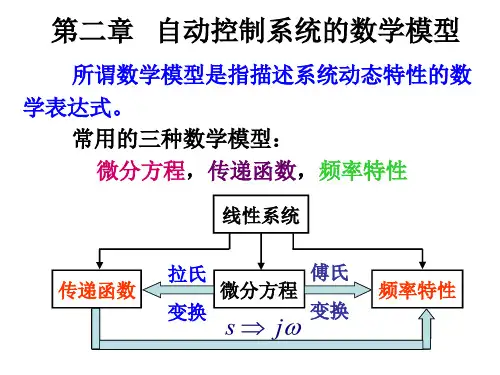
控制系统的微分方程数学模型:描述系统输入、输出变量以及内部各变量之间关系的数学表达式。
描述各变量动态关系的表达式称为动态数学模型,常用的动态模型为微分方程。
建立数学模型的方法分为解析法和实验法。
解析法:依据系统及元件各变量之间所遵循的物理、化学定律列写出变量间的数学表达式,并实验验证。
实验法:对系统或元件输入一定形式的信号(阶跃信号、单位脉冲信号、正弦信号等),根据系统或元件的输出响应,经过数据处理而辨识出系统的数学模型。
建立微分方程的步骤:1、分析各元件的工作原理,明确输入、输出量;2、按照信号的传递顺序,列写各变量的动态关系式;3、化简(线性化、消去中间变量),写出输入、输出变量间的数学表达式。
例:RLC 无源网络如图所示,图中R 、L 、C 分别为电阻(Ω)、电感(H)、电容(F);建立输入电压u r (V)和输出电压u c (V)之间的动态方程。
解由基尔霍夫定律得:()1()()()r di t u t Ri t L i t dt dt C=++⎰1()()c C u t i t dt=⎰消去中间变量i (t ),可得:222()d ()2()()c c c rd u t u t T T u t u t dt dt ζ++=22()()()()c c c rd u t du t LC RC u t u t dt dt ++=令,则微分方程为:2,2LC T RC T ζ==式中:T 称为时间常数,单位为s,称为阻尼比,无量纲。
ζ例设有一弹簧、质量块、阻尼器组成的系统如图所示,当外力F 作用于系统时,系统将产生运动。
建立外力F 与质量块位移y (t )之间的动态方程。
其中弹簧的弹性系数为k ,阻尼器的阻尼系数为f ,质量块的质量为m 。
解对质量块进行受力分析,作用在质量块上的力有:外力: F 弹簧恢复力:Ky(t)阻尼力:()dy t f dt由牛顿第二定律得:22()()()d y t dy t m F f Ky t dt dt =−−22()()()d y t dy t m f Ky t Fdt dt ++=222()()2()d y t dy t T T y t kFdt dt ζ++=令,,/T m K =2/T f K ζ=1/k K =/2f mKζ=则微分方程可以写为该方程描述了由质量块、弹簧和阻尼器组成系统的动态关系,它是一个二阶线性定常微分方程。
自动控制原理传递函数
自动控制原理传递函数是描述控制系统输入输出关系的数学模型,通常以s域传递函数的形式表示。
在控制系统中,输入信
号经过传递函数的作用,产生输出信号。
传递函数是由系统的微分方程所得到的拉普拉斯变换得到的。
控制系统中的传递函数通常是指示系统的输入与输出之间的关系,称为开环传递函数。
在控制系统中,传递函数是通过将系统的微分方程进行拉普拉斯变换得到的。
传递函数可以用来分析系统的动态性能,并通过调整传递函数的参数来改善系统的稳定性、快速性和准确性。
传递函数通常用以下形式表示:
G(s) = Y(s) / U(s)
其中,G(s)是传递函数,Y(s)是输出信号的拉普拉斯变换,U(s)是输入信号的拉普拉斯变换。
传递函数描述了输入与输出信号之间的关系,以及系统对输入信号的响应速度和稳定性等性能。
控制系统设计中,可以根据给定的性能要求,选择合适的传递函数来实现所需的控制效果。
常见的传递函数包括比例传递函数、积分传递函数、微分传递函数以及它们的组合。
通过对传递函数进行数学分析和计算,可以得到系统的稳定性、频率响应、步跃响应等性能指标。
控制系统设计师可以根据这些指标来优化系统的性能,并进行参数调整和改进。
总之,传递函数是自动控制原理中非常重要的概念,它描述了控制系统输入与输出之间的关系。
通过分析和优化传递函数,可以实现控制系统的稳定性、准确性和快速性等性能要求。