约束和广义坐标解析
- 格式:ppt
- 大小:1.75 MB
- 文档页数:24
广义坐标和约束体系在物理学和工程学中,广义坐标和约束体系是描述多体系统运动的重要工具。
广义坐标是一组描述系统状态的独立变量,而约束体系则是一组将系统中各个部分联系在一起的条件。
本文将介绍广义坐标的概念和应用,并探讨约束体系在多体系统动力学中的作用。
一、广义坐标的概念和应用在传统的牛顿力学中,我们常常使用笛卡尔坐标系来描述物体的位置和运动。
然而,在复杂的多体系统中,使用笛卡尔坐标系来描述每个质点的运动往往变得非常复杂。
为了简化问题,引入广义坐标的概念就显得尤为重要。
广义坐标是一组相互独立的变量,它们可以用来描述系统的状态。
与笛卡尔坐标不同的是,广义坐标可以是质点的位置坐标、质点的广义速度、质点的质心位置、刚体的欧拉角等等。
通过引入广义坐标,我们可以用更简洁的方式描述系统的状态,简化求解的过程。
广义坐标的应用十分广泛。
在理论物理中,广义坐标常常用于构建拉格朗日力学和哈密顿力学的数学框架。
在工程学中,广义坐标常常用于描述机械系统中各个零件的运动和变形。
例如,通过引入关节的旋转角度作为广义坐标,可以简化机械臂的运动学分析。
二、约束体系在多体系统动力学中的作用在多体系统中,各个质点之间通常存在一定的约束关系。
这些约束条件可以是几何约束(如刚度约束、长度约束等)或非几何约束(如速度约束、加速度约束等)。
约束体系是将约束条件用方程形式表示的系统。
约束体系在多体系统动力学中发挥着重要作用。
它可以用来限制系统的自由度,从而简化问题的求解。
通过引入拉格朗日乘子的方法,我们可以将约束条件与系统的动力学方程相结合,得到描述系统运动的广义拉格朗日方程。
在这个过程中,广义坐标发挥了重要的作用,它将系统状态映射到一个更简洁的空间中。
约束体系还可以用来分析系统的稳定性和振动特性。
通过线性化约束方程,我们可以得到系统的模态分析,从而了解系统的固有振动频率和模式形态。
这对于设计和优化振动系统非常重要。
三、结论广义坐标和约束体系在多体系统的描述和分析中起到了至关重要的作用。
一、广义坐标与虚位移原理在推出普遍动力学定理时,我们用的是直角坐标来表示质点系的运动。
一般地说用直角坐标来表示质点系的运动并不总是方便的,特别是研究多自由度的非自由质点系动力学问题中,如果采用广义坐标来研究则方便得多。
下面我们先讨论一下约束方程与约束的分类(理想约束) 1)、约束方程与约束的分类在静力学中,我们已经提过约束的概念。
即限制各质点几何位置或运动的物体称之为为约束,这种约束我们称之为几何约束。
约束——加在质点或质点系上的限制运动条件,也可以用数学方程来表示。
这种方程称之为约束方程。
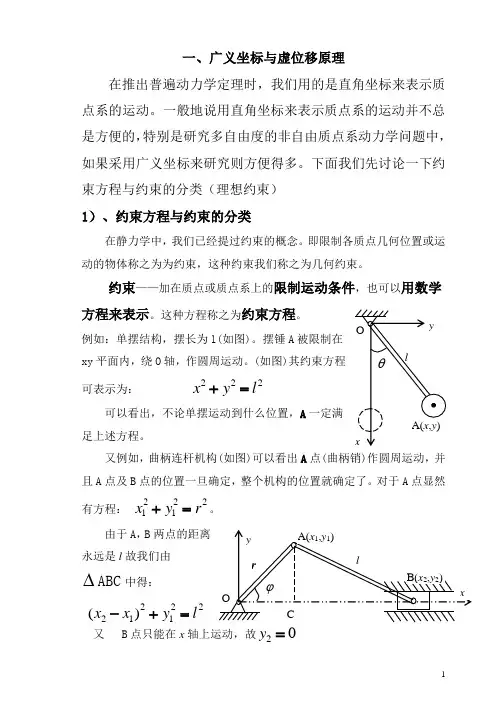
例如:单摆结构,摆长为l(如图)。
摆锤A 被限制在xy 平面内,绕O 轴,作圆周运动。
(如图)其约束方程可表示为: 222l yx =+可以看出,不论单摆运动到什么位置,A 一定满足上述方程。
又例如,曲柄连杆机构(如图)可以看出A 点(曲柄销)作圆周运动,并且A 点及B 点的位置一旦确定,整个机构的位置就确定了。
对于A 点显然有方程: 22121r y x =+。
由于A ,B 两点的距离永远是l 故我们由∆ABC 中得:221212)(l y x x =+-又 B 点只能在x 轴上运动,故02=y上述三个方程就是曲柄连杆机构的约束方程。
可以看出,上述方程有一个特点,那就是:约束方程不显含时间参数t 。
也就是说,约束是不随时间而改变的。
象这类约束我们称之为谓定常几何约束如果(否则)约束方程显含时间参数t ,则称之为谓非定常几何约束。
例如摆长l 随时间变化的单摆(如图)单摆原长为0l ,拉动绳子的速度为0v (常数)则其约束方程为: 20022)(t v l yx -=+这方程中显含时间t ,所以这种约束是非定常约束。
除了限制质点系位置的几何约束外,还有限制质点系中各质点速度的约束———运动约束。
也就是说,约束方程不但含有坐标参数,而且含有坐标的速度。
例如,一个半径为r 的的车轮,在一平面内只滚不滑(如图)可以看出,C 点y 坐标是不变的,故其几何约束方程为:r y c =又:由于车轮只滚不滑则其接触点的速度为零。
1. 约束的概念与分类 1)约束与约束方程质点系中限制质点运动(位置、速度)的条件称为约束,表为:f x y z xy z t (,,; , , ;)=02)稳定与不稳定约束稳定约束与时间无关:f x y z (,,)=0 不稳定约束与时间相关:f x y z t (,,,)=03)几何与运动约束几何约束亦称位置约束:f x y z t (,,,)=0运动约束又称微分约束:f x y z xy z t (,,; , , ;)=04)可解与不可解约束可解约束:f x y z t (,,,)≤0 不可解约束:f x y z t (,,,)=05)完整系与不完整系完整系:几何、不可解约束系2.广义坐标 对n 个质点组成的质点系,约束为:f x y z t i k i (,,,)(,,...,)==012则独立坐标减少为s=3n-k 个,设独立变量为q q q s 12,,...,称为Lagrange 广义坐标。
独立坐标的个数s=3n-k 为系统的自由度。
不独立变量与广义坐标的关系可表为:x x q q q t y y q q q t z z q q q t i n i i s i i s ii s ===⎧⎨⎪⎩⎪=(,,...,,)(,,...,,)(,,...,,)(,,...,)12121212,此s 个广义坐标确定系统位置。
3.虚位移受约束系在运动过程中各质点的位置既要满足运动微分方程,也要满足约束方程。
同时满足两个方程的运动为真实运动,此时在dt 时间间隔内发生的位移称为实位移,记为d r。
只满足约束方程而与时间无关(δt =0)的位移称为虚位移,记为δr ,它并未实际发生,只是想象中可能发生的位移。
显然,实位移d r 是许多虚位移δr 中的一个。
4.理想约束虚功:作用在质点上的力在任意虚位移δr 上所做的功。
理想约束:约束反力在任意虚位移δr 上所做的虚功之和为零,即,R r i i ⋅=∑δ0。
两端约束闭口梁扭转广义坐标法概述说明1. 引言1.1 概述在工程领域中,闭口梁扭转问题一直是一个重要的研究方向。
闭口梁是指两端固定且不受外界力作用的梁结构,而扭转是指梁在受到扭矩作用下发生的变形。
了解闭口梁在受到扭转力矩时的响应和行为对于工程设计和结构安全至关重要。
因此,研究如何准确地预测闭口梁扭转问题一直是学术界和工程实践者们共同的目标。
本文将介绍一种被称为“两端约束闭口梁扭转广义坐标法”的数值求解方法,并详细阐述其原理、实现步骤以及数值求解算法。
通过该方法,我们可以通过建立闭口梁模型并运用广义坐标法进行求解,得出闭口梁在受到扭转力矩时的变形和应力分布情况。
同时,我们还将进行实验验证,并对结果进行分析和讨论,以验证该方法的有效性和准确性。
1.2 文章结构本文共包括五个部分:引言、两端约束闭口梁扭转广义坐标法详解、数值求解方法和算法实现、实验验证与结果分析以及结论与展望。
在引言部分,将介绍本文的研究背景和概述,明确研究目的和意义。
在接下来的部分中,我们将详细阐述两端约束闭口梁扭转广义坐标法的原理,并介绍闭口梁模型的建立过程。
然后,我们将介绍数值求解方法和算法实现的具体步骤,以及进行数值离散化和计算方程组求解的过程。
在实验验证与结果分析部分,我们将设计实验方案,设置相关参数,并对实验结果进行数据分析。
最后,在结论与展望部分,我们将总结研究结果并提出改进展望。
1.3 目的本文旨在通过引入两端约束闭口梁扭转广义坐标法这一数值求解方法,探讨闭口梁在受到扭转力矩时的变形特性和应力情况。
通过详细阐述该方法的原理及其算法实现步骤,并进行实验验证和结果分析,本文旨在提供一种可行且准确预测闭口梁扭转问题的数值模拟方法。
通过本文研究,我们希望能够为工程设计领域提供有关闭口梁扭转问题的重要理论和数值求解方法,为相关工程实践提供参考和指导。
同时,本文也将发掘该数值求解方法的优势和不足之处,并提出改进展望,以促进该领域的进一步研究和发展。
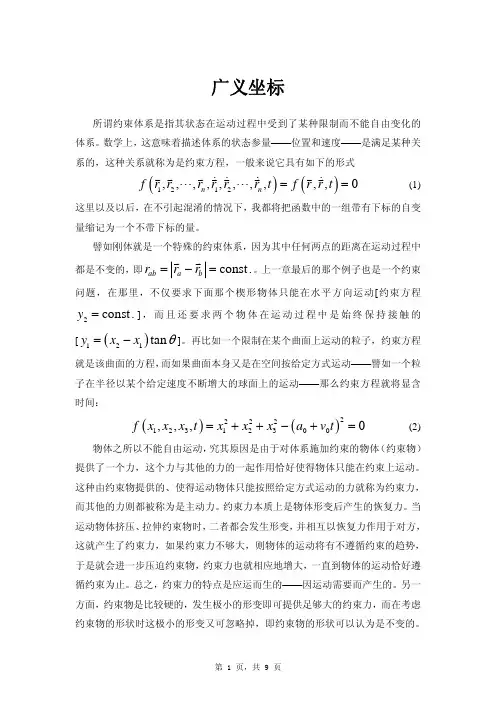
广义坐标所谓约束体系是指其状态在运动过程中受到了某种限制而不能自由变化的体系。
数学上,这意味着描述体系的状态参量——位置和速度——是满足某种关系的,这种关系就称为是约束方程,一般来说它具有如下的形式()()1212,,,,,,,,,,0n nf r r r r r r t f r r t ==K K K K K K K K "" (1) 这里以及以后,在不引起混淆的情况下,我都将把函数中的一组带有下标的自变量缩记为一个不带下标的量。
譬如刚体就是一个特殊的约束体系,因为其中任何两点的距离在运动过程中都是不变的,即const.ab a b r r r =−=K K 。
上一章最后的那个例子也是一个约束问题,在那里,不仅要求下面那个楔形物体只能在水平方向运动[约束方程],而且还要求两个物体在运动过程中是始终保持接触的[2const.y =()121tan y x x θ=−]。
再比如一个限制在某个曲面上运动的粒子,约束方程就是该曲面的方程,而如果曲面本身又是在空间按给定方式运动——譬如一个粒子在半径以某个给定速度不断增大的球面上的运动——那么约束方程就将显含时间:()()222212312300,,,0f x x x t x x x a v t =++−+= (2) 物体之所以不能自由运动,究其原因是由于对体系施加约束的物体(约束物)提供了一个力,这个力与其他的力的一起作用恰好使得物体只能在约束上运动。
这种由约束物提供的、使得运动物体只能按照给定方式运动的力就称为约束力,而其他的力则都被称为是主动力。
约束力本质上是物体形变后产生的恢复力。
当运动物体挤压、拉伸约束物时,二者都会发生形变,并相互以恢复力作用于对方,这就产生了约束力,如果约束力不够大,则物体的运动将有不遵循约束的趋势,于是就会进一步压迫约束物,约束力也就相应地增大,一直到物体的运动恰好遵循约束为止。
总之,约束力的特点是应运而生的——因运动需要而产生的。

1. 约束的概念与分类 1)约束与约束方程质点系中限制质点运动(位置、速度)的条件称为约束,表为:f x y z xy z t (,,; , , ;)=02)稳定与不稳定约束稳定约束与时间无关:f x y z (,,)=0 不稳定约束与时间相关:f x y z t (,,,)=03)几何与运动约束几何约束亦称位置约束:f x y z t (,,,)=0运动约束又称微分约束:f x y z xy z t (,,; , , ;)=04)可解与不可解约束可解约束:f x y z t (,,,)≤0 不可解约束:f x y z t (,,,)=05)完整系与不完整系完整系:几何、不可解约束系2.广义坐标 对n 个质点组成的质点系,约束为:f x y z t i k i (,,,)(,,...,)==012则独立坐标减少为s=3n-k 个,设独立变量为q q q s 12,,...,称为Lagrange 广义坐标。
独立坐标的个数s=3n-k 为系统的自由度。
不独立变量与广义坐标的关系可表为:x x q q q t y y q q q t z z q q q t i n i i s i i s ii s ===⎧⎨⎪⎩⎪=(,,...,,)(,,...,,)(,,...,,)(,,...,)12121212,此s 个广义坐标确定系统位置。
3.虚位移受约束系在运动过程中各质点的位置既要满足运动微分方程,也要满足约束方程。
同时满足两个方程的运动为真实运动,此时在dt 时间间隔内发生的位移称为实位移,记为d r。
只满足约束方程而与时间无关(δt =0)的位移称为虚位移,记为δr ,它并未实际发生,只是想象中可能发生的位移。
显然,实位移d r 是许多虚位移δr 中的一个。
4.理想约束虚功:作用在质点上的力在任意虚位移δr 上所做的功。
理想约束:约束反力在任意虚位移δr 上所做的虚功之和为零,即,R r i i ⋅=∑δ0。