约束自由度与广义坐标
- 格式:ppt
- 大小:1.30 MB
- 文档页数:34
广义坐标和约束体系在物理学和工程学中,广义坐标和约束体系是描述多体系统运动的重要工具。
广义坐标是一组描述系统状态的独立变量,而约束体系则是一组将系统中各个部分联系在一起的条件。
本文将介绍广义坐标的概念和应用,并探讨约束体系在多体系统动力学中的作用。
一、广义坐标的概念和应用在传统的牛顿力学中,我们常常使用笛卡尔坐标系来描述物体的位置和运动。
然而,在复杂的多体系统中,使用笛卡尔坐标系来描述每个质点的运动往往变得非常复杂。
为了简化问题,引入广义坐标的概念就显得尤为重要。
广义坐标是一组相互独立的变量,它们可以用来描述系统的状态。
与笛卡尔坐标不同的是,广义坐标可以是质点的位置坐标、质点的广义速度、质点的质心位置、刚体的欧拉角等等。
通过引入广义坐标,我们可以用更简洁的方式描述系统的状态,简化求解的过程。
广义坐标的应用十分广泛。
在理论物理中,广义坐标常常用于构建拉格朗日力学和哈密顿力学的数学框架。
在工程学中,广义坐标常常用于描述机械系统中各个零件的运动和变形。
例如,通过引入关节的旋转角度作为广义坐标,可以简化机械臂的运动学分析。
二、约束体系在多体系统动力学中的作用在多体系统中,各个质点之间通常存在一定的约束关系。
这些约束条件可以是几何约束(如刚度约束、长度约束等)或非几何约束(如速度约束、加速度约束等)。
约束体系是将约束条件用方程形式表示的系统。
约束体系在多体系统动力学中发挥着重要作用。
它可以用来限制系统的自由度,从而简化问题的求解。
通过引入拉格朗日乘子的方法,我们可以将约束条件与系统的动力学方程相结合,得到描述系统运动的广义拉格朗日方程。
在这个过程中,广义坐标发挥了重要的作用,它将系统状态映射到一个更简洁的空间中。
约束体系还可以用来分析系统的稳定性和振动特性。
通过线性化约束方程,我们可以得到系统的模态分析,从而了解系统的固有振动频率和模式形态。
这对于设计和优化振动系统非常重要。
三、结论广义坐标和约束体系在多体系统的描述和分析中起到了至关重要的作用。
理论力学知识点总结理论力学是一门研究物体机械运动一般规律的学科,它是许多工程技术领域的基础。
以下是对理论力学一些重要知识点的总结。
一、静力学静力学主要研究物体在力系作用下的平衡问题。
1、力的基本概念力是物体之间的相互作用,具有大小、方向和作用点三个要素。
力的表示方法包括矢量表示和解析表示。
2、约束与约束力约束是限制物体运动的条件,约束力则是约束对物体的作用力。
常见的约束类型有柔索约束、光滑接触面约束、光滑圆柱铰链约束等,每种约束对应的约束力具有特定的方向和特点。
3、受力分析对物体进行受力分析是解决静力学问题的关键步骤。
要明确研究对象,画出其隔离体,逐个分析作用在物体上的力,包括主动力和约束力,并画出受力图。
4、力系的简化力系可以通过平移和合成等方法进行简化,得到一个合力或合力偶。
力的平移定理指出,力可以平移到另一点,但必须附加一个力偶。
5、平面力系的平衡方程平面任意力系的平衡方程有三个:∑Fx = 0,∑Fy = 0,∑Mo(F) =0。
对于平面汇交力系和平面力偶系,平衡方程分别有所简化。
6、空间力系的平衡方程空间力系的平衡方程数量增多,需要考虑三个方向的力平衡和三个方向的力矩平衡。
二、运动学运动学研究物体的运动而不考虑引起运动的力。
1、点的运动学描述点的运动可以使用矢量法、直角坐标法和自然法。
在自然法中,引入了弧坐标、切向加速度和法向加速度的概念。
2、刚体的基本运动刚体的基本运动包括平动和定轴转动。
平动时,刚体上各点的运动轨迹相同、速度和加速度相同;定轴转动时,刚体上各点的角速度和角加速度相同。
3、点的合成运动点的合成运动是指一个动点相对于两个不同参考系的运动。
通过选取合适的动点、动系和定系,运用速度合成定理和加速度合成定理来求解问题。
4、刚体的平面运动刚体平面运动可以分解为随基点的平动和绕基点的转动。
平面运动刚体上各点的速度可以用基点法、速度投影定理和瞬心法求解,加速度则可以用基点法求解。
三、动力学动力学研究物体的运动与作用力之间的关系。

第14章 虚位移原理在静力学中,我们利用力系的平衡条件研究了刚体在力的作用下的平衡问题,但对有许多约束的刚体系而言,求解某些未知力需要取几次研究对象,建立足够多的平衡方程,才能求出所要求的未知力。
这样做是非常繁杂,同时平衡方程的确立只是对刚体而言是必要和充分的条件;而对任意的非自由质点系而言,它只是必要条件不是充分条件。
从本章开始我们学习用数学分析的方法来研究非自由质点系的力学问题,称为分析力学。
1788年,法国科学家拉格朗日发表的《分析力学》一书,给出了解决非自由质点系的新方法,即利用广义坐标描述非自由质点系的运动,使描述系统运动量大大减少,同时从能量角度出发将质点系的动能、势能与功用广义坐标联系起来,给出了动力学普遍方程和拉格朗日方程。
虚位移原理是静力学的最一般原理,它给出了任意质点系平衡的必要和充分条件,减少了不必要的平衡方程,从系统主动力作功的角度出发研究质点系的平衡问题。
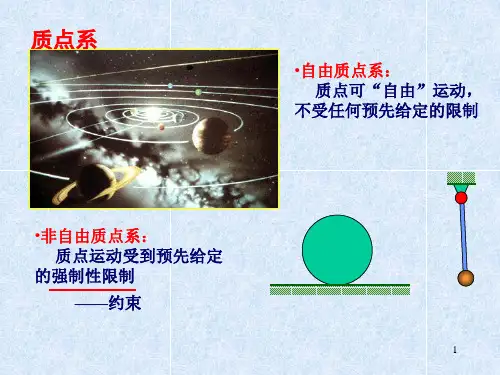
14.1 约束·自由度·广义坐标质点或质点系的运动受到它周围物体的限制作用,这种限制作用称为约束,表示约束的数学方程称为约束方程。
按约束方程的形式对约束进行以下分类。
1.几何约束和运动约束限制质点或质点系在空间的几何位置的条件称为几何约束。
例如图14-1所示的单摆,其约束方程为222l =y +x又如图14-2所示的曲柄连杆机构,其约束方程为⎪⎩⎪⎨⎧--0+22222=y l =)y (y +)x (x r =y x BB A 2B A A A图14-2xy图14-3上述例子中的约束方程均表示几何约束。
如果约束方程中含有坐标对时间的导数,或者说,约束限制质点或质点系运动的条件,称为运动约束。
例如图14-3所示在平直轨道上作纯滚动的圆轮,轮心C 的速度为ωr =v c运动约束方程为0=ωr v c -设c x 和φ分别为轮心C 点的坐标和圆轮的转角,则上式可改写为0C =r φx- 2.定常约束与非定常约束约束方程中不显含时间的约束称为定常约束,上面各例中的约束均为定常约束。