CREO 机构的运动仿真与分析
- 格式:ppt
- 大小:3.18 MB
- 文档页数:52
Creo2.0动态机构仿真操作手册1 范围本标准规定了Creo2.0动态机构仿真建模方法及思路。
本标准适用于公司产品结构设计选用。
2 Creo2.0机构模块简介在进行机械设计时,建立模型后设计者往往需要通过虚拟的手段,在电脑上模拟所设计的机构,来达到在虚拟的环境中模拟现实机构运动的目的。
对于提高设计效率降低成本有很大的作用。
Creo Parametric 2.0中“机构”模块是专门用来进行运动仿真和动态分析的模块。
design(机械设计)和Mechanism dynamics(机械动态)两个方面的分析功能。
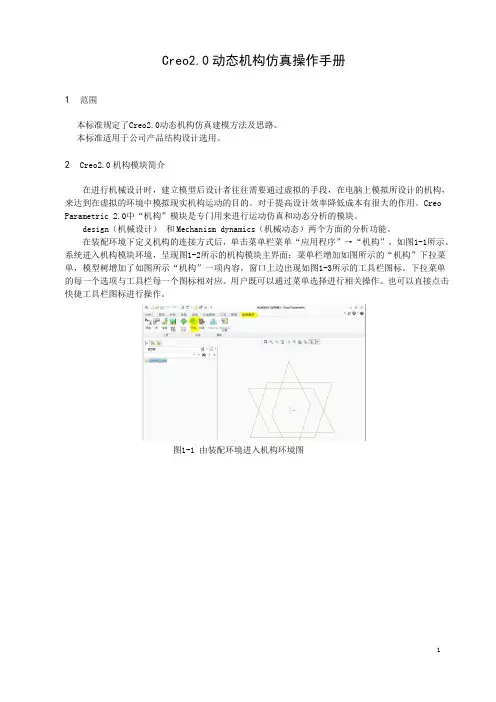
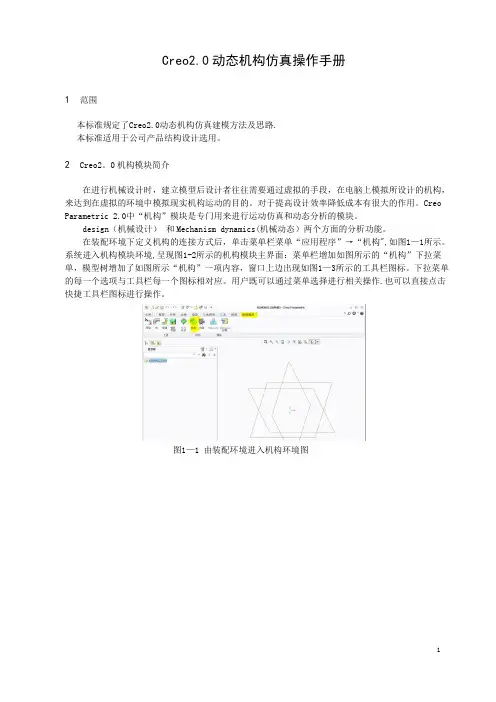
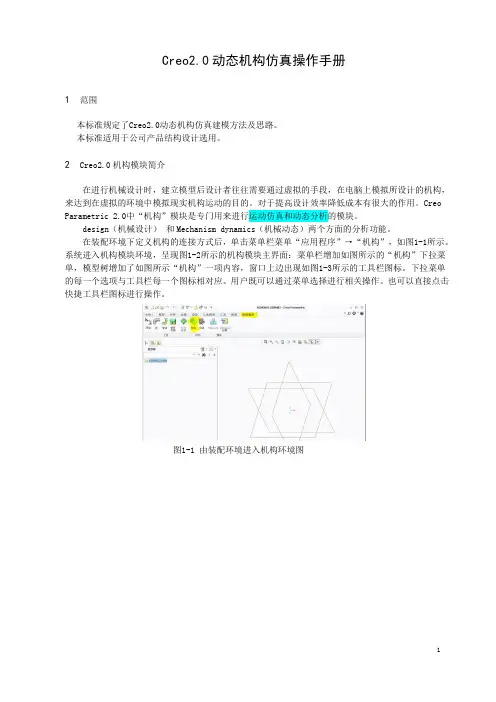
在装配环境下定义机构的连接方式后,单击菜单栏菜单“应用程序”→“机构”,如图1-1所示。
系统进入机构模块环境,呈现图1-2所示的机构模块主界面:菜单栏增加如图所示的“机构”下拉菜单,模型树增加了如图所示“机构”一项内容,窗口上边出现如图1-3所示的工具栏图标。
下拉菜单的每一个选项与工具栏每一个图标相对应。
用户既可以通过菜单选择进行相关操作。
也可以直接点击快捷工具栏图标进行操作。
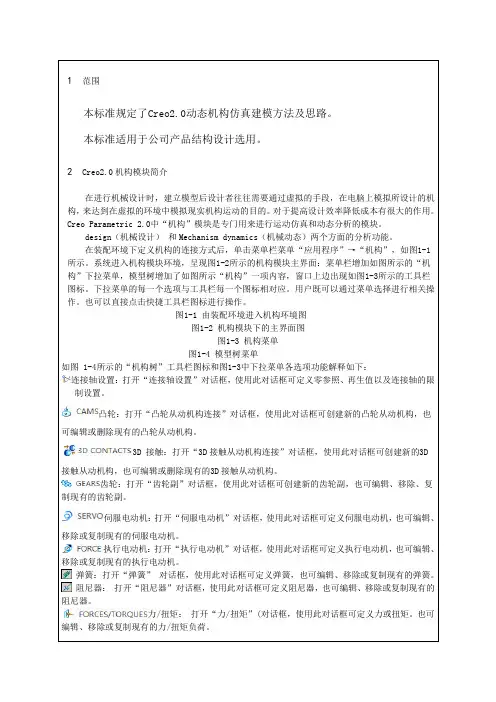
图1-1 由装配环境进入机构环境图1图1-2 机构模块下的主界面图图1-3 机构菜单如图 1-4所示的“机构树”工具栏图标和图1-3中下拉菜单各选项功能解释如下:设置。
凸轮:打开“凸轮从动机构连接”对话框,使用此对话框可创建新的凸轮从动机构,也可编辑或删除现有的凸轮从动机构。
3D 接触:打开“3D接触从动机构连接”对话框,使用此对话框可创建新的3D接触从动机构,也可编辑或删除现有的3D接触从动机构。
齿轮:打开“齿轮副”对话框,使用此对话框可创建新的齿轮副,也可编辑、移除、复制现有的齿轮副。
伺服电动机:打开“伺服电动机”对话框,使用此对话框可定义伺服电动机,也可编辑、移除或复制现有的伺服电动机。
执行电动机:打开“执行电动机”对话框,使用此对话框可定义执行电动机,也可编辑、移除或复制现有的执行电动机。
弹簧:打开“弹簧” 对话框,使用此对话框可定义弹簧,也可编辑、移除或复制现有的弹簧。
Creo2.0动态机构仿真操作手册1 范围本标准规定了Creo2.0动态机构仿真建模方法及思路。
本标准适用于公司产品结构设计选用。
2 Creo2.0机构模块简介在进行机械设计时,建立模型后设计者往往需要通过虚拟的手段,在电脑上模拟所设计的机构,来达到在虚拟的环境中模拟现实机构运动的目的。
对于提高设计效率降低成本有很大的作用。
Creo Parametric 2.0中“机构”模块是专门用来进行运动仿真和动态分析的模块。
design(机械设计)和Mechanism dynamics(机械动态)两个方面的分析功能。
在装配环境下定义机构的连接方式后,单击菜单栏菜单“应用程序”→“机构”,如图1-1所示。
系统进入机构模块环境,呈现图1-2所示的机构模块主界面:菜单栏增加如图所示的“机构”下拉菜单,模型树增加了如图所示“机构”一项内容,窗口上边出现如图1-3所示的工具栏图标。
下拉菜单的每一个选项与工具栏每一个图标相对应。
用户既可以通过菜单选择进行相关操作。
也可以直接点击快捷工具栏图标进行操作。
图1-1 由装配环境进入机构环境图1图1-2 机构模块下的主界面图图1-3 机构菜单如图 1-4所示的“机构树”工具栏图标和图1-3中下拉菜单各选项功能解释如下:设置。
凸轮:打开“凸轮从动机构连接”对话框,使用此对话框可创建新的凸轮从动机构,也可编辑或删除现有的凸轮从动机构。
3D 接触:打开“3D接触从动机构连接”对话框,使用此对话框可创建新的3D接触从动机构,也可编辑或删除现有的3D接触从动机构。
齿轮:打开“齿轮副”对话框,使用此对话框可创建新的齿轮副,也可编辑、移除、复制现有的齿轮副。
伺服电动机:打开“伺服电动机”对话框,使用此对话框可定义伺服电动机,也可编辑、移除或复制现有的伺服电动机。
执行电动机:打开“执行电动机”对话框,使用此对话框可定义执行电动机,也可编辑、移除或复制现有的执行电动机。
弹簧:打开“弹簧” 对话框,使用此对话框可定义弹簧,也可编辑、移除或复制现有的弹簧。
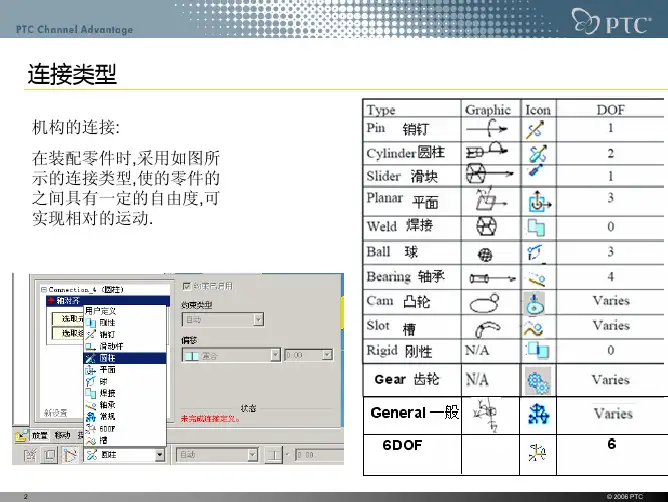

基于Creo的凸轮机构三维参数化设计及运动仿真刘鹏冯立艳李静卢家宣蔡保杰冷腾飞苗伟晨(华北理工大学以升创新基地河北·唐山063210)摘要本文主要介绍用Creo对凸轮机构进行参数化设计并以圆柱槽状凸轮机构为例进行运动仿真,再通过C#软件完成人机交互,即操作人只需在程序界面输入槽状凸轮相应参数即可完成凸轮的三维建模,从而绘制出相应的位移、速度、加速度曲线进入仿真和分析环节。
这样即缩短了凸轮的设计周期提高了设计质量,并且解决了凸轮教学课程存在的设备成本高、设备数量少、实验时间和空间受限等难题。
关键词凸轮Creo参数化仿真中图分类号:TP391.9文献标识码:A1基于Creo软件下的凸轮三维建模1.1Creo环境下槽状凸轮机构三维参数化造型基本思路(1)参数化过程需准备可变参数包括行程、推程角、远休角、回程角、近休角、外径、壁厚、基底高度、凸轮高度、槽深、槽宽,以上变量成为参数组。
(2)通过根据凸轮不同运动规律编写推程、远休止、回程、近休止段凸轮轮廓线方程,本例应用的凸轮推程回程为正弦加速度运动规律。
(3)分段绘制出理论轮廓曲线,将各段曲线首尾相连封闭,即为完整的凸轮理论廓线。
(4)生成凸轮实体;加入参变量,实现参数化。
1.2三维建模具体步骤Creo是如今今应用最广的三维绘图软件之一,主要用于参数化实体设计,它所提供的功能包括实体设计、曲面设计、零件装配、建立工程图、模具设计、、电路设计、装配管件设计、加工制造和逆向工程等。
其系统特性主要包含单一数据库、全参数化、全相关、基于特征的实体建模等,不仅能实现零件的参数化设计,也可以方便地建立各零部件的通用件库和标准件库,从而提高设计的效率和质量。
1.2.1槽状凸轮机构的三位参数化建模自行设定初步参数组,注意推程角、远休角、回程角、近休角之和为360,(2)运行creo软件,新建零件,进入界面。
(3)选择【工具:程序】,出现菜单管理器,选择编辑设计,出现记事本,在IN PUT和END PUT语句中间输入语句,然后存盘,确认将所做的修改体现到模型中,最后在菜单管理器中输入设定的初步参数值。
Creo2.0动态机构仿真操作手册1 范围本标准规定了Creo2.0动态机构仿真建模方法及思路.本标准适用于公司产品结构设计选用。
2 Creo2。
0机构模块简介在进行机械设计时,建立模型后设计者往往需要通过虚拟的手段,在电脑上模拟所设计的机构,来达到在虚拟的环境中模拟现实机构运动的目的。
对于提高设计效率降低成本有很大的作用。
Creo Parametric 2.0中“机构”模块是专门用来进行运动仿真和动态分析的模块。
design(机械设计)和Mechanism dynamics(机械动态)两个方面的分析功能。
在装配环境下定义机构的连接方式后,单击菜单栏菜单“应用程序”→“机构",如图1—1所示。
系统进入机构模块环境,呈现图1-2所示的机构模块主界面:菜单栏增加如图所示的“机构”下拉菜单,模型树增加了如图所示“机构”一项内容,窗口上边出现如图1—3所示的工具栏图标。
下拉菜单的每一个选项与工具栏每一个图标相对应。
用户既可以通过菜单选择进行相关操作.也可以直接点击快捷工具栏图标进行操作。
图1—1 由装配环境进入机构环境图1图1-2 机构模块下的主界面图图1—3 机构菜单图1-4 模型树菜单如图 1—4所示的“机构树"工具栏图标和图1-3中下拉菜单各选项功能解释如下:连接轴设置:打开“连接轴设置”对话框,使用此对话框可定义零参照、再生值以及连接轴的限制设置。
凸轮:打开“凸轮从动机构连接"对话框,使用此对话框可创建新的凸轮从动机构,也可编辑或删除现有的凸轮从动机构。
3D 接触:打开“3D接触从动机构连接”对话框,使用此对话框可创建新的3D接触从动机构,也可编辑或删除现有的3D接触从动机构。
齿轮:打开“齿轮副”对话框,使用此对话框可创建新的齿轮副,也可编辑、移除、复制现有的齿轮副。
伺服电动机:打开“伺服电动机"对话框,使用此对话框可定义伺服电动机,也可编辑、移除或复制现有的伺服电动机.执行电动机:打开“执行电动机”对话框,使用此对话框可定义执行电动机,也可编辑、移除或复制现有的执行电动机。
连接轴设置:3D力初始条件:质量属性:打开“质量属性”对话框,使用此对话框可指定零件的质量属性,也可指定组件的拖动:打开“拖动”对话框,使用此对话框可将机构拖动至所需的配置并拍取快照。
连接:打开“连接组件”对话框,使用此对话框可根据需要锁定或解锁任意主体或连接,并运分析:打开“分析”对话框,使用此对话框可添加、编辑、移除、复制或运行分析。
回放:轨迹曲线:打开“轨迹曲线”对话框,使用此对话框生成轨迹曲线或凸轮合成曲线<>或直接点击图标工具接触】命令【传动带】工具是通过两带轮曲面与带平面重合连接的工具。
带传动是由两个带轮和一根命令单击“完成”按钮,完成带传动的设计,带传动连接添加到模型树和机构树中,)启用摩擦:勾选此复选框,可以为连接轴指定摩擦,为动摩擦系数,功能来研究整个机械或部分机械的运动。
单击【机构】→【拖动】或直接单击工具栏图标显示选定快照。
在列表中选定快照后单击此按钮可以显示该快照中机构的具体位置。
并选取主体,可以锁定主体。
)选择【应用程序】→【标准】重新进入装配环境下。
单击添加零件,打开“打开”对话框,)单击图标,然后选后给当前机构拍照,列表框中增加快照单击,再单击)单击【约束】选项卡→单击【锁定主体图标】,选择具栏图标可以在窗口中直接选定连接轴也可以输入一个角度后按(1)在装配模式单击【应用程序】→【机构】→【重力】命令单击【机构】→【执行电动机命令】单击【机构】→【弹簧】,弹出“弹簧”对话框:用于在机构中两点之间添加压缩或拉伸弹簧的按钮。
【扭转弹簧】:用于在机构中两点之间添加平移阻尼器的按钮。
:用于在连接轴上添加对机构产生旋转阻尼的按钮。
单击【机构】→【力/扭矩】初始条件单击【机构】→【初始条件】:此为定义位置初始条件,可以选择已经拍下的快照,点击单击【机构】→【质量属性】,进入“质量属性”对话框点击【机构】→【机构分析】命令【启用【启用【删除图元】【删除电动机】【添加所有的电动机】【回放】:是对机构中零件的运动进行干涉检测,进入回放对话框。
Creo2.0动态机构仿真操作手册1 范围本标准规定了Creo2.0动态机构仿真建模方法及思路。
本标准适用于公司产品结构设计选用。
2 Creo2.0机构模块简介在进行机械设计时,建立模型后设计者往往需要通过虚拟的手段,在电脑上模拟所设计的机构,来达到在虚拟的环境中模拟现实机构运动的目的。
对于提高设计效率降低成本有很大的作用。
Creo Parametric 2.0中“机构”模块是专门用来进行运动仿真和动态分析的模块。
design(机械设计)和Mechanism dynamics(机械动态)两个方面的分析功能。
在装配环境下定义机构的连接方式后,单击菜单栏菜单“应用程序”→“机构”,如图1-1所示。
系统进入机构模块环境,呈现图1-2所示的机构模块主界面:菜单栏增加如图所示的“机构”下拉菜单,模型树增加了如图所示“机构”一项内容,窗口上边出现如图1-3所示的工具栏图标。
下拉菜单的每一个选项与工具栏每一个图标相对应。
用户既可以通过菜单选择进行相关操作。
也可以直接点击快捷工具栏图标进行操作。
图1-1 由装配环境进入机构环境图1图1-2 机构模块下的主界面图图1-3 机构菜单如图 1-4所示的“机构树”工具栏图标和图1-3中下拉菜单各选项功能解释如下:设置。
凸轮:打开“凸轮从动机构连接”对话框,使用此对话框可创建新的凸轮从动机构,也可编辑或删除现有的凸轮从动机构。
3D 接触:打开“3D接触从动机构连接”对话框,使用此对话框可创建新的3D接触从动机构,也可编辑或删除现有的3D接触从动机构。
齿轮:打开“齿轮副”对话框,使用此对话框可创建新的齿轮副,也可编辑、移除、复制现有的齿轮副。
伺服电动机:打开“伺服电动机”对话框,使用此对话框可定义伺服电动机,也可编辑、移除或复制现有的伺服电动机。
执行电动机:打开“执行电动机”对话框,使用此对话框可定义执行电动机,也可编辑、移除或复制现有的执行电动机。
弹簧:打开“弹簧” 对话框,使用此对话框可定义弹簧,也可编辑、移除或复制现有的弹簧。
Creo2.0动态机构仿真操作手册1 范围本标准规定了Creo2.0动态机构仿真建模方法及思路。
本标准适用于公司产品结构设计选用。
2 Creo2.0机构模块简介在进行机械设计时,建立模型后设计者往往需要通过虚拟的手段,在电脑上模拟所设计的机构,来达到在虚拟的环境中模拟现实机构运动的目的。
对于提高设计效率降低成本有很大的作用。
Creo Parametric 2.0中“机构”模块是专门用来进行运动仿真和动态分析的模块。
design(机械设计)和Mechanism dynamics(机械动态)两个方面的分析功能。
在装配环境下定义机构的连接方式后,单击菜单栏菜单“应用程序”→“机构”,如图1-1所示。
系统进入机构模块环境,呈现图1-2所示的机构模块主界面:菜单栏增加如图所示的“机构”下拉菜单,模型树增加了如图所示“机构”一项内容,窗口上边出现如图1-3所示的工具栏图标。
下拉菜单的每一个选项与工具栏每一个图标相对应。
用户既可以通过菜单选择进行相关操作。
也可以直接点击快捷工具栏图标进行操作。
图1-1 由装配环境进入机构环境图1图1-2 机构模块下的主界面图图1-3 机构菜单如图 1-4所示的“机构树”工具栏图标和图1-3中下拉菜单各选项功能解释如下:设置。
凸轮:打开“凸轮从动机构连接”对话框,使用此对话框可创建新的凸轮从动机构,也可编辑或删除现有的凸轮从动机构。
3D 接触:打开“3D接触从动机构连接”对话框,使用此对话框可创建新的3D接触从动机构,也可编辑或删除现有的3D接触从动机构。
齿轮:打开“齿轮副”对话框,使用此对话框可创建新的齿轮副,也可编辑、移除、复制现有的齿轮副。
伺服电动机:打开“伺服电动机”对话框,使用此对话框可定义伺服电动机,也可编辑、移除或复制现有的伺服电动机。
执行电动机:打开“执行电动机”对话框,使用此对话框可定义执行电动机,也可编辑、移除或复制现有的执行电动机。
弹簧:打开“弹簧” 对话框,使用此对话框可定义弹簧,也可编辑、移除或复制现有的弹簧。

动态机构仿真操作手册1 范围本标准规定了动态机构仿真建模方法及思路。
本标准适用于公司产品结构设计选用。
2 机构模块简介在进行机械设计时,建立模型后设计者往往需要通过虚拟的手段,在电脑上模拟所设计的机构,来达到在虚拟的环境中模拟现实机构运动的目的。
对于提高设计效率降低成本有很大的作用。
Creo Parametric 中“机构”模块是专门用来进行运动仿真和动态分析的模块。
design(机械设计)和Mechanism dynamics(机械动态)两个方面的分析功能。
在装配环境下定义机构的连接方式后,单击菜单栏菜单“应用程序”→“机构”,如图1-1所示。
系统进入机构模块环境,呈现图1-2所示的机构模块主界面:菜单栏增加如图所示的“机构”下拉菜单,模型树增加了如图所示“机构”一项内容,窗口上边出现如图1-3所示的工具栏图标。
下拉菜单的每一个选项与工具栏每一个图标相对应。
用户既可以通过菜单选择进行相关操作。
也可以直接点击快捷工具栏图标进行操作。
图1-1 由装配环境进入机构环境图图1-2 机构模块下的主界面图图1-3 机构菜单图1-4 模型树菜单如图 1-4所示的“机构树”工具栏图标和图1-3中下拉菜单各选项功能解释如下:连接轴设置:打开“连接轴设置”对话框,使用此对话框可定义零参照、再生值以及连接轴的限制设置。
:打开“凸轮从动机构连接”对话框,使用此对话框可创建新的凸轮从动机构,也可编辑或删除现有的凸轮从动机构。
3D 接触:打开“3D接触从动机构连接”对话框,使用此对话框可创建新的3D接触从动机构,也可编辑或删除现有的3D接触从动机构。
打开“齿轮副”对话框,使用此对话框可创建新的齿轮副,也可编辑、移除、复制现有的齿轮副。
打开“伺服电动机”对话框,使用此对话框可定义伺服电动机,也可编辑、移除或复制现有的伺服电动机。
:打开“执行电动机”对话框,使用此对话框可定义执行电动机,也可编辑、移除或复制现有的执行电动机。
Creo2.0动态机构仿真操作手册1 范围本标准规定了Creo2.0动态机构仿真建模方法及思路。
本标准适用于公司产品结构设计选用。
2 Creo2.0机构模块简介在进行机械设计时,建立模型后设计者往往需要通过虚拟的手段,在电脑上模拟所设计的机构,来达到在虚拟的环境中模拟现实机构运动的目的。
对于提高设计效率降低成本有很大的作用。
Creo Parametric 2.0中“机构”模块是专门用来进行运动仿真和动态分析的模块。
design(机械设计)和Mechanism dynamics(机械动态)两个方面的分析功能。
在装配环境下定义机构的连接方式后,单击菜单栏菜单“应用程序”→“机构”,如图1-1所示。
系统进入机构模块环境,呈现图1-2所示的机构模块主界面:菜单栏增加如图所示的“机构”下拉菜单,模型树增加了如图所示“机构”一项内容,窗口上边出现如图1-3所示的工具栏图标。
下拉菜单的每一个选项与工具栏每一个图标相对应。
用户既可以通过菜单选择进行相关操作。
也可以直接点击快捷工具栏图标进行操作。
图1-1 由装配环境进入机构环境图1图1-2 机构模块下的主界面图图1-3 机构菜单如图 1-4所示的“机构树”工具栏图标和图1-3中下拉菜单各选项功能解释如下:设置。
凸轮:打开“凸轮从动机构连接”对话框,使用此对话框可创建新的凸轮从动机构,也可编辑或删除现有的凸轮从动机构。
3D 接触:打开“3D接触从动机构连接”对话框,使用此对话框可创建新的3D接触从动机构,也可编辑或删除现有的3D接触从动机构。
齿轮:打开“齿轮副”对话框,使用此对话框可创建新的齿轮副,也可编辑、移除、复制现有的齿轮副。
伺服电动机:打开“伺服电动机”对话框,使用此对话框可定义伺服电动机,也可编辑、移除或复制现有的伺服电动机。
执行电动机:打开“执行电动机”对话框,使用此对话框可定义执行电动机,也可编辑、移除或复制现有的执行电动机。
弹簧:打开“弹簧” 对话框,使用此对话框可定义弹簧,也可编辑、移除或复制现有的弹簧。
Creo2.0动态机构仿真操作手册1 范围本标准规定了Creo2.0动态机构仿真建模方法及思路。
本标准适用于公司产品结构设计选用。
2 Creo2.0机构模块简介在进行机械设计时,建立模型后设计者往往需要通过虚拟的手段,在电脑上模拟所设计的机构,来达到在虚拟的环境中模拟现实机构运动的目的。
对于提高设计效率降低成本有很大的作用。
Creo Parametric 2.0中“机构”模块是专门用来进行运动仿真和动态分析的模块。
design(机械设计)和Mechanism dynamics(机械动态)两个方面的分析功能。
在装配环境下定义机构的连接方式后,单击菜单栏菜单“应用程序”→“机构”,如图1-1所示。
系统进入机构模块环境,呈现图1-2所示的机构模块主界面:菜单栏增加如图所示的“机构”下拉菜单,模型树增加了如图所示“机构”一项内容,窗口上边出现如图1-3所示的工具栏图标。
下拉菜单的每一个选项与工具栏每一个图标相对应。
用户既可以通过菜单选择进行相关操作。
也可以直接点击快捷工具栏图标进行操作。
图1-1 由装配环境进入机构环境图1图1-2 机构模块下的主界面图图1-3 机构菜单如图 1-4所示的“机构树”工具栏图标和图1-3中下拉菜单各选项功能解释如下:设置。
凸轮:打开“凸轮从动机构连接”对话框,使用此对话框可创建新的凸轮从动机构,也可编辑或删除现有的凸轮从动机构。
3D 接触:打开“3D接触从动机构连接”对话框,使用此对话框可创建新的3D接触从动机构,也可编辑或删除现有的3D接触从动机构。
齿轮:打开“齿轮副”对话框,使用此对话框可创建新的齿轮副,也可编辑、移除、复制现有的齿轮副。
伺服电动机:打开“伺服电动机”对话框,使用此对话框可定义伺服电动机,也可编辑、移除或复制现有的伺服电动机。
执行电动机:打开“执行电动机”对话框,使用此对话框可定义执行电动机,也可编辑、移除或复制现有的执行电动机。
弹簧:打开“弹簧” 对话框,使用此对话框可定义弹簧,也可编辑、移除或复制现有的弹簧。
Creo2。
0动态机构仿真操作手册1 范围本标准规定了Creo2.0动态机构仿真建模方法及思路。
本标准适用于公司产品结构设计选用。
2 Creo2。
0机构模块简介在进行机械设计时,建立模型后设计者往往需要通过虚拟的手段,在电脑上模拟所设计的机构,来达到在虚拟的环境中模拟现实机构运动的目的。
对于提高设计效率降低成本有很大的作用。
Creo Parametric 2。
0中“机构”模块是专门用来进行运动仿真和动态分析的模块。
design(机械设计) 和Mechanism dynamics(机械动态)两个方面的分析功能。
在装配环境下定义机构的连接方式后,单击菜单栏菜单“应用程序”→“机构”,如图1—1所示。
系统进入机构模块环境,呈现图1—2所示的机构模块主界面:菜单栏增加如图所示的“机构"下拉菜单,模型树增加了如图所示“机构”一项内容,窗口上边出现如图1-3所示的工具栏图标.下拉菜单的每一个选项与工具栏每一个图标相对应。
用户既可以通过菜单选择进行相关操作.也可以直接点击快捷工具栏图标进行操作.图1—1 由装配环境进入机构环境图1图1-2 机构模块下的主界面图图1—3 机构菜单图1-4 模型树菜单如图 1-4所示的“机构树”工具栏图标和图1-3中下拉菜单各选项功能解释如下:连接轴设置:打开“连接轴设置"对话框,使用此对话框可定义零参照、再生值以及连接轴的限制设置。
凸轮:打开“凸轮从动机构连接”对话框,使用此对话框可创建新的凸轮从动机构,也可编辑或删除现有的凸轮从动机构。
3D 接触:打开“3D接触从动机构连接”对话框,使用此对话框可创建新的3D接触从动机构,也可编辑或删除现有的3D接触从动机构。
齿轮:打开“齿轮副”对话框,使用此对话框可创建新的齿轮副,也可编辑、移除、复制现有的齿轮副。
伺服电动机:打开“伺服电动机”对话框,使用此对话框可定义伺服电动机,也可编辑、移除或复制现有的伺服电动机。
执行电动机:打开“执行电动机”对话框,使用此对话框可定义执行电动机,也可编辑、移除或复制现有的执行电动机。