Creo运动仿真实例 PPT
- 格式:ppt
- 大小:4.50 MB
- 文档页数:39
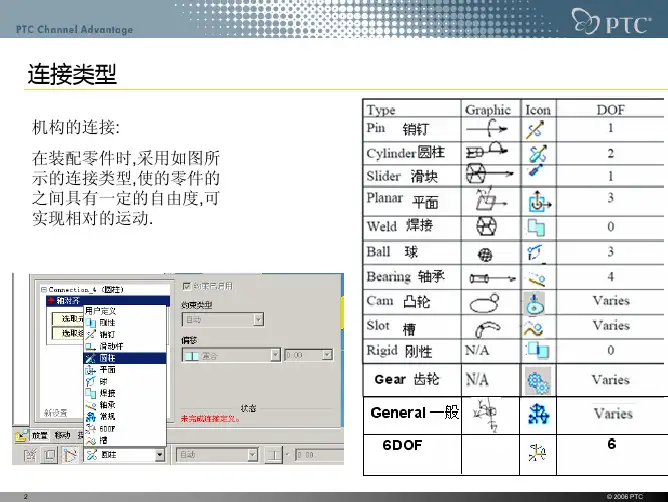

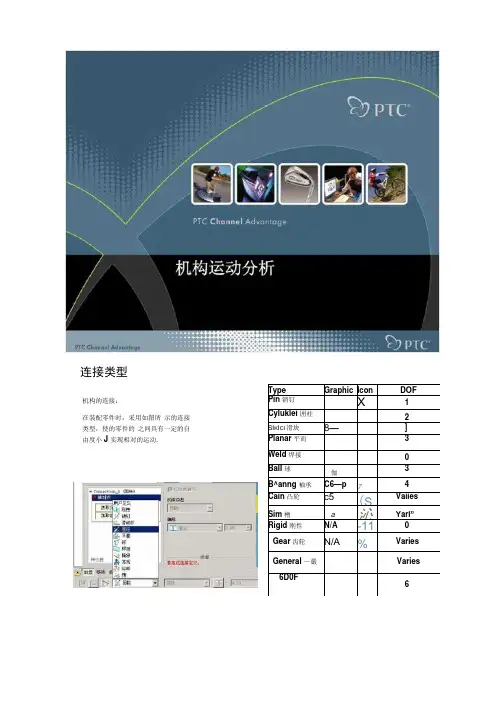
连接类型机构的连接:在装配零件时,采用如图所示的连接类型,使的零件的之间具有一定的自由度小J 实现相对的运动. Type Graphic Icon DOF Pin销钉X1 Cyluklei 囲柱2 SI K I CI滑块8—] Planar平而3Weld焊接0 Ball 球伽3B^anng袖承C6—p74 Cain凸轮c5(S Vaiies Sim槽a沁Yari”Rigid刚性N/A-110 Gear齿轮N/A%Varies General —嚴Varies6D0F6连接类型销钉连接 mdo\connections\pin&cylinder♦轴对齐/插入曲面.平面匹配/对齐或点对齐(径向)汪:即允许绕着指定的轴逬行旋转的连接•共1个自由度. 注:即允许绕着指定的轴迸行旋转和平移的连接,共2个 自由度.连接类型滑动杆连接 mdo\co nnections'slider♦轴对齐/插入曲面♦平面匹配/对齐或点对齐帥向) 注:即允许沿着指定的轴逬行平移的连接 总共1个自由度.平面连接 mdo\connections\plane♦平面匹配/对齐汪:即允许沿着1轴旋转和沿2轴方向平移 总共3个自由度.PTC Channel Advantoge••••W PTC*圆拄连接♦轴对齐/插入曲面平面连接销钉连接11拄连接滑块连接连接类型焊接连接两个坐标系对齐,元件自由度被完全消除。
连接后,元件与组件成为一 个主体■相互之间不再有自由度。
如果将一个子组件与组件用焊接连接,子组件内各零件将参照组件坐标系按其原有自由度的作用。
总自由度 为0。
刚性连接使用一个或多个基本约束,将元件与组件连接到一起。
连接后,元件与 组件成为一个主体,相互之间不再有自由度.如果将一个子组件与组件 用刚性连接,子组件内各零件也将一起被"粘〃住,其原有自由度不起作 用。
总自由度为0。
PTC Channel Advanlogc•••••W PTC*连接类型 球连接点与点对齐注:即允许绕着任意方向旋转的连接,总3个自由度轴承连接点在轴/曲线上注:它与机械上的“轴承”不同,它是元件(或组件)上 的一个点对齐到组件(或元件)上的一条直边或轴线 上,因此元件可沿轴线平移并任意方向旋转,具有1 个平移自由度和3个旋转自由度,总自由度为4拖拽当机构连接好以后,可以通过拖拽功能,使元件间产生 相对运动. 使用快照使剃拖动“(Dfdg )对话框中的•快照气Snapshots )迭项卡可显示不同配 置组件的己保存快範的列表。