creo3.0机构动画运动仿真
- 格式:pdf
- 大小:881.68 KB
- 文档页数:51

如何在ProE-Creo中实现三维动画效果
如何在ProE-Creo中实现三维动画效果
如何在ProE Creo中实现三维动画效果?
2摘要: 在日常工作中,我们常常要做些机构来分析产品的包络,或向客户展示我们的产品。
在这些情况下,我们都用到ProE Creo中的三维运动模块。
在ProE Creo中,有两个模块可以实现三维动画效果:一个是机构仿真,主要用于机构 ...
在日常工作中,我们常常要做些机构来分析产品的包络,或向客户展示我们的产品。
在这些情况下,我们都用到ProE Creo中的三维运动模块。
在ProE Creo中,有两个模块可以实现三维动画效果:一个是机构仿真,主要用于机构的受力分析,另一个是动画,主要用于产品的展示。
这里我们以Creo中的动画模块环境,向大家简单介绍下动画模块的使用
方法。
以下我用一个简单的针筒实例来分享下具体使用方法:
首先,打开我们做动画的产品,选择应用程序下的动画模块。
进入动画环境后,首先选择“新建动画”下的“快照“,接着“定义主体”,然后在主体对话框内选择“每个主体一个零件”。
这样做的目地是为了使每个零件
之间具有相对运动的条件。
接着,我们为动画创立关键帧所需要的快照,此个案例,我们只需要三个动作就能完成针筒的组装,分别是组装活塞,组装推杆,组装针头盖。
(此处要注意调
节好装配的顺序)
接着,我们就为关键帧设置时间节点:
为了更直观的表现装配效果,我们还可以在活塞的组装过程中,使针筒透明化。
此时就要用到“定时透明”功能
最后,我们只需要单击屏幕上方的“生成并运行动画”按键即可观看动画效果。
最终效果如下:。


creo3.0怎么制作装配动画?creo3.0装配体动画的制作⽅法
作为结构设计⼈员,结构设计好之后,给相关⼈员演⽰结构组成部分,装配动画是应该是最好的选择,直观明了,易懂,该怎么制作装配动画呢?下⾯我们就来看看详细的教程。
PTC CREO 3.0 M150 64位简体中⽂特别版(附破解⽂件+安装教程)
类型:3D制作类
⼤⼩:49KB
语⾔:简体中⽂
时间:2017-12-10
查看详情
1、打开软件,导⼊装配体⽂件,选择“动画”模块,进⼊动画操作界⾯。
2、单击“新建动画->快照”菜单,在弹出的对话框中输⼊名称,单击确定。
3、按“主体定义”,在弹出的对话框中按“每个主体⼀个零件”,按关闭。
4、单击“关键帧序列”,进⼊关键帧序列对话框,单击序列下的关键帧快照图标,进⼊快照界⾯,把下⽅的⾼级拖动选项展开,主要为X、Y、Z轴的的平移和旋转作业,便于后续操作。
5、选择X、Y、Z轴的的平移和旋转操作(单选),在所需的零件上单击,达到作业⽬的,然后单击⼀次快照图标,每操作⼀次或⼏次(取决于动画的精细度),单击⼀次快照,重复操作,取多次快照,然后关闭。
开始多长时间出现,为之前的快照排序。
7、每切换⼀次快照,填⼊⼊时间,并按⼀下右侧的“+”,底部的插值选择“平滑,最后点确认。
8、单击”创建“,然后按”回放“,就可以看到动作跑起来了。
以上就是Creo3.0装配体动画的制作⽅法,希望⼤家喜欢,请继续关注。
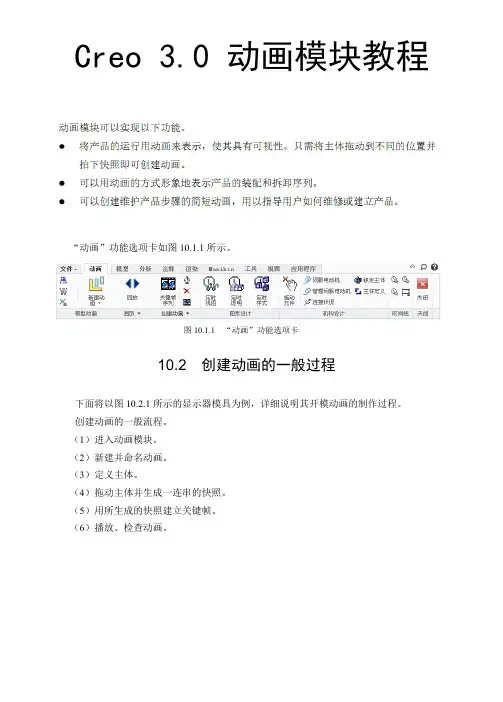
Creo 3.0 动画模块教程“动画”功能选项卡如图10.1.1所示。
10.2 创建动画的一般过程下面将以图10.2.1所示的显示器模具为例,详细说明其开模动画的制作过程。
创建动画的一般流程。
(1)进入动画模块。
(2)新建并命名动画。
(3)定义主体。
(4)拖动主体并生成一连串的快照。
(5)用所生成的快照建立关键帧。
(6)播放、检查动画。
图10.1.1“动画”功能选项卡(7)保存动画文件。
10.2.1 进入动画模块Step1. 将工作目录设置至D : \creo3.2\work\ch10.02;打开文件display_mold.asm (注意:要进入动画模块,必须在装配模块中进行)。
Step2. 单击功能选项卡区域中的“动画”按钮,系统进入“动画”模块,界面如图10.2.2所示。
图10.2.1 显示器模具上模(具)滑块下模(具)设计件图10.2.2“动画”模块界面10.2.2 创建动画Step1. 定义一个主动画。
(1) 选择功能选项卡中的命令,系统弹出图10.2.3所示的“定义动画”对话框。
(2)在对话框中输入动画名称display_mold_open ,然后单击按钮,关闭对话框。
Step2. 定义基体和主体。
(1)单击功能选项卡区域中的“主体定义”按钮,系统弹出图10.2.4所示的“主体”对话框(一)。
(2)单击对话框中的按钮,系统将所有零件作为主体加入主体列表中,如图10.2.5所示。
(3)选取图10.2.5所示的对话框中的Ground ,单击按钮,系统弹出“主体定义”对话框(图10.2.6)及“选择”对话框。
(4)定义作为Ground (基体)的零件。
在模型树中选取,然后单击“选择”对话框中的按钮,再单击图10.2.6所示的“主体定义”对话框中的按钮。
完成后,“主体”对话框如图10.2.7所示。
(5)单击“主体”对话框中的按钮。
Step3.创建快照。
单击功能选项卡区域中的“拖动元件”按钮图,10.2.3“定义动画”对话框图10.2.4 “主体”对话框(一)图10.2.5 “主体”对话框(二)图10.2.6 “主体定义”对话框系统弹出图10.2.8所示的“拖动”对话框,该对话框中有两个选项卡──和,在选项卡中可移动主体并拍取快照,在选项卡中可设置主体间的约束。

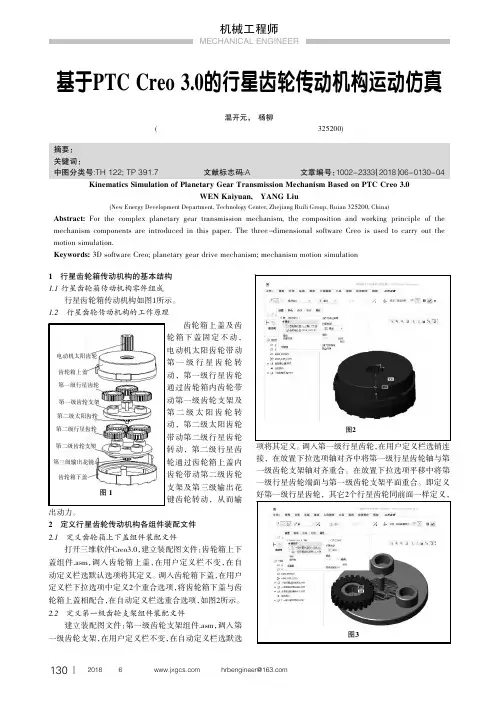
基于Creo3.0的电子驻车链条和链轮传动机构的运动仿真余乐乐,温开元(浙江瑞立集团技术中心新能源开发部,浙江瑞安325200)摘要:为了直观地模拟链条和链轮传动机构运动,从而发现设计过程中存在的问题,利用三维软件C r e o3.0建立链条传动的各个零件的.a s m装配图,对链条和链轮传动机构进行了运动仿真分析。
关键词:三维软件C r e o;链条传动;机构运动仿真中图分类号:TH132.45文献标志码:A文章编号:员园园圆原圆猿猿猿(圆园员8)08原园088原园4 Motion Simulation of E-parking Chain and Sprocket Transmission MechanismBased on Creo3.0YU Lele,WEN Kaiyuan(New Energy Development Department,Zhejiang Ruili Group Technology Center,Ruian325200,China) Abstract:In order to visually simulate the movement of the chain and sprocket drive mechanism to discover the problems in the design process,the.asm assembly diagram of each part of the chain drive is established using the three-dimensional software Creo.The chain and sprocket transmission mechanism is simulated by the motion simulation analysis.Keywords:3D software Creo;chain transmission;mechanism motion simulation1建立链条传动的各个零件1)建立链条运动轨迹零件。
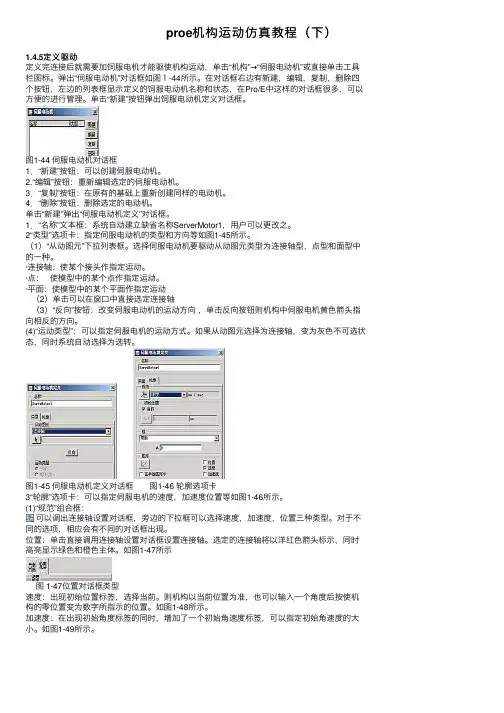
proe机构运动仿真教程(下)1.4.5定义驱动定义完连接后就需要加饲服电机才能驱使机构运动,单击“机构”→“伺服电动机”或直接单击⼯具栏图标。
弹出“伺服电动机”对话框如图1-44所⽰。
在对话框右边有新建,编辑,复制,删除四个按钮,左边的列表框显⽰定义的饲服电动机名称和状态,在Pro/E中这样的对话框很多,可以⽅便的进⾏管理。
单击“新建”按钮弹出饲服电动机定义对话框。
图1-44 伺服电动机对话框1.“新建”按钮:可以创建伺服电动机。
2.“编辑”按钮:重新编辑选定的伺服电动机。
3.“复制”按钮:在原有的基础上重新创建同样的电动机。
4.“删除”按钮:删除选定的电动机。
单击“新建”弹出“伺服电动机定义”对话框。
1.“名称”⽂本框:系统⾃动建⽴缺省名称ServerMotor1,⽤户可以更改之。
2“类型”选项卡:指定伺服电动机的类型和⽅向等如图1-45所⽰。
(1)“从动图元”下拉列表框。
选择伺服电动机要驱动从动图元类型为连接轴型,点型和⾯型中的⼀种。
·连接轴:使某个接头作指定运动。
·点:使模型中的某个点作指定运动。
·平⾯:使模型中的某个平⾯作指定运动(2)单击可以在窗⼝中直接选定连接轴(3)“反向”按钮:改变伺服电动机的运动⽅向,单击反向按钮则机构中伺服电机黄⾊箭头指向相反的⽅向。
(4)“运动类型”:可以指定伺服电机的运动⽅式。
如果从动图元选择为连接轴,变为灰⾊不可选状态,同时系统⾃动选择为选转。
图1-45 伺服电动机定义对话框图1-46 轮廓选项卡3“轮廓”选项卡:可以指定伺服电机的速度,加速度位置等如图1-46所⽰。
(1)“规范”组合框:可以调出连接轴设置对话框,旁边的下拉框可以选择速度,加速度,位置三种类型。
对于不同的选项,相应会有不同的对话框出现。
位置:单击直接调⽤连接轴设置对话框设置连接轴。
选定的连接轴将以洋红⾊箭头标⽰,同时⾼亮显⽰绿⾊和橙⾊主体。
如图1-47所⽰图 1-47位置对话框类型速度:出现初始位置标签,选择当前。
Pro/E软件与机构运动的仿真摘要:本文讨论了机械原理(机械基础)教学中机构运动仿真视频的作用及其优势,着重对用Pro/E软件制作机构运动的多媒体仿真视频进行了探讨。
关键词:Pro/E;机构运动;多媒体仿真一.前言随着多媒体技术的确发展,其应用已遍及社会生活的各个角落,正在对人们的工作方式、生活方式带来巨大的变革。
同样,多媒体技术对教学也产生了积极的效应,能为学生提供最理想的教学环境。
由于多媒体具有图、文、声并茂及活动影象的特点,具有许多宝贵的特性与功能。
主要表现为;直观性,能突破视觉的限制,多角度地观察对象,并能够突出要点;图文声像并茂,多角度调动学生的情绪、注意力和兴趣。
动态性,动态反映机构运动的全过程,有效地突破了传统教学难点;通过多媒体对真实情景的模拟,培养学生的探索、创造能力;传统的机构运动教学多半是用挂图进行讲述,既没有立体感,也没有动态感,没有接触过机械的学生很难想象出机构运动的情形,如果在多媒体教学环境中,通过动画、图形、声音的演示,加上教师深入浅出的讲解,学生会在不知不觉中学到知识。
这样学生就能够在原有认知结构和生活经验的基础上,认同我们的概念和思维方式,并强化到自己新的认知结构中,形成自己新的概念和思维方式。
Pro/E软件平台能直接仿真机构各零件的造型与装配,可进行机构运动的仿真,甚至可以仿真一台机器的运行。
对机构的运动进行多角度、多方位的观查,还可进行透视和剖视情况观查。
并能将运动的画面生成视频文件,供离开Pro/E 软件平台时进行演示。
二.Pro/E简介Pro/E全称是“Pro ENGINEER”由美国PTC(参数)公司开发的一款三维软件。
Pro/E软件具有操作容易、使用方便、修改方便的特点。
因此在机械三维实体造型设计中得到了广泛的应用。
具有很强的实体造型、虚拟装配和仿真运行能力。
功能界面清楚明确,让使用者视觉和心理都有一种轻松感。
目前已经成为机械设计、家电设计、模具设计等行业所普遍采用的三维软件。
圆园员8年第6期网址: 电邮:hrbengineer@基于PTC Creo 3.0卡钳驻车执行器的圆弧齿同步带机构运动仿真余乐乐,温开元(浙江瑞立集团技术中心新能源开发部,浙江瑞安325200)1圆弧齿同步带运动思路分析要想使圆弧齿同步带真正地运动,必须将每个齿运动起来,为此,将圆弧齿同步带每个齿拆分为独立单元齿,然后将每个单元齿定义连接装配起来形成完整的圆弧齿同步带,给第一单元齿以驱动力并获得初始速度,则每个单元齿沿着皮带轮轨迹运动起来,就像小火车一样沿着轨道行驶。
员)建立同步带轮运动轨迹零件。
打开三维软件Creo3.0,建立零件图:同步带轮运动轨迹.prt,画大小皮带轮圆弧,中间用两直线连接,分别相切大小圆弧,在大小圆弧中心分别作两中心线,如图1所示。
2)建立小圆弧齿皮带轮.prt 零件图,如图2所示。
3)建立大圆弧齿皮带轮.prt 零件图,如图3所示。
源)建立皮带.prt 零件图,分别作两中心线,如图4所示。
5)建立圆弧同步带单元齿.prt 零件图,如图5所示。
圆援员装配同步带轮运动轨迹零件打开装配图,调入同步带轮运动轨迹零件,用户定义栏不变,在自动定义栏下拉栏选默认选项。
圆援圆装配第一个圆弧齿同步带单元齿零件调入圆弧齿同步带单元齿零件,在用户定义栏下拉栏内选槽连接选项,在放置下面槽的直线上的点选项下面选取图中圆弧齿同步带单元齿零件平面与圆弧过渡的顶点,再选取同步带轮运动轨迹零件的曲线,注意要全部选取,使曲线封闭。
点下面新建集中再选槽连接选项,选取图中圆弧齿同步带单元齿零件平面与圆弧过渡的另一个顶点,再选取图中同步带轮运动轨迹零件的曲线,注意摘要:利用三维软件C r e o 3.0建立同步带轮运动轨迹零件,对圆弧齿同步带传动进行装配,对圆弧齿同步带轮机构分析,完成了圆弧齿同步带机构运动仿真。
关键词:三维软件C r e o ;圆弧齿同步带;机构运动仿真中图分类号:TH 132.32;TP 391.7文献标志码:B文章编号:员园园圆原圆猿猿猿(圆园员8)06原园104原园3Motion Simulation of Arc-tooth Timing Belt Mechanism of Caliper Parking Actuator Based on PTC Creo 3.0YU LeLe ,WEN Kaiyuan(Zhejiang Ruili Group Technology Center New Energy Development Department,Ruian 325200,China)Abstract:This paper uses three-dimensional software Creo 3.0to establish synchronous locomotion trajectory parts.The assembly of the arc tooth synchronous belt drive is carried out.The analysis of the belt pulley mechanism of the arc tooth is completed.The motion simulation of the belt mechanism of the arc tooth is completed.Keywords:three-dimensional software Creo;arc-tooth synchronous belt;mechanism motion simulation图1图2图3图4图5104要全部选取,使曲线封闭。
Creo动态机构仿真操作⼿册完整版C r e o动态机构仿真操作⼿册HUA system office room 【HUA16H-TTMS2A-HUAS8Q8-HUAH1688】Creo2.0动态机构仿真操作⼿册1 范围本标准规定了Creo2.0动态机构仿真建模⽅法及思路。
本标准适⽤于公司产品结构设计选⽤。
2 Creo2.0机构模块简介在进⾏机械设计时,建⽴模型后设计者往往需要通过虚拟的⼿段,在电脑上模拟所设计的机构,来达到在虚拟的环境中模拟现实机构运动的⽬的。
对于提⾼设计效率降低成本有很⼤的作⽤。
Creo Parametric 2.0中“机构”模块是专门⽤来进⾏运动仿真和动态分析的模块。
design(机械设计)和Mechanism dynamics(机械动态)两个⽅⾯的分析功能。
在装配环境下定义机构的连接⽅式后,单击菜单栏菜单“应⽤程序”→“机构”,如图1-1所⽰。
系统进⼊机构模块环境,呈现图1-2所⽰的机构模块主界⾯:菜单栏增加如图所⽰的“机构”下拉菜单,模型树增加了如图所⽰“机构”⼀项内容,窗⼝上边出现如图1-3所⽰的⼯具栏图标。
下拉菜单的每⼀个选项与⼯具栏每⼀个图标相对应。
⽤户既可以通过菜单选择进⾏相关操作。
也可以直接点击快捷⼯具栏图标进⾏操作。
图1-1 由装配环境进⼊机构环境图图1-2 机构模块下的主界⾯图图1-3 机构菜单图1-4 模型树菜单如图 1-4所⽰的“机构树”⼯具栏图标和图1-3中下拉菜单各选项功能解释如下:连接轴设置:打开“连接轴设置”对话框,使⽤此对话框可定义零参照、再⽣值以及连接轴的限制设置。
凸轮:打开“凸轮从动机构连接”对话框,使⽤此对话框可创建新的凸轮从动机构,也可编辑或删除现有的凸轮从动机构。
3D 接触:打开“3D接触从动机构连接”对话框,使⽤此对话框可创建新的3D接触从动机构,也可编辑或删除现有的3D接触从动机构。
齿轮:打开“齿轮副”对话框,使⽤此对话框可创建新的齿轮副,也可编辑、移除、复制现有的齿轮副。
用Pro/E做机构运动仿真————凸轮机构一、做一个简单的凸轮机构需要三个实体凸轮cam、滑块block,承载板base。
(如下图所示)。
承载板base凸轮cam滑块block图1 凸轮组件零件图二、开始制作:1、设置工作目录。
2、新建一个asm组合件。
3、安装基板base零件:选择“插入/元件/装配”,从弹出的对话框中选择base.prt,从图二所示的装配面板中选择方式,即缺省方式。
即完成第一个零件base的装配。
4、安装凸轮:选择“插入/元件/装配”,从弹出的对话框中选择cam.prt,从图二所示的装配面板中点选“连接”出现连接面板(图三)。
5、接上一步,在连接类型中选择“销钉Pin”连接,要完成“销钉”连接,必须进行两个约束,即第一是“轴对齐”约束,可从绘图区点选凸轮上的圆柱体的圆柱面、接着点选基体上圆柱孔的圆柱表面(也可分别选择凸轮上圆柱体的轴线及基体上圆柱孔的轴线);第二个约束是“平移”,可分别点选凸轮与基板的两个接触平面,在连接面板输入偏移值为0。
单击“确定”完成“销钉”连接。
其连接效果如图4所示。
6、安装滑块:选择“插入/元件/装配”,从弹出的对话框中选择block.prt,从图二所示的装配面板中点选“连接”出现连接面板(图三)。
在连接面板中的“类型”选项下选择“滑动杆”。
7、点选滑块零件上的圆柱表面,紧接着选基体零件上的圆弧槽的圆柱面作为“轴对齐”限制条件,接着分别选两个接触平面作为“旋转”限制条件,偏移值为0。
如图5所示。
8、在连接面板(图三)中选“移动”选项卡。
拖拽滑块大致到这个图6这个位置,从而完成了我们凸轮机构的连接工作。
图2 装配面板对话框图3 连接面板对话框图4 凸轮与基体连接后的效果图图5 滑块的连接图6 滑块拖动后的位置。
Creo2.0动态机构仿真操作手册1 范围本标准规定了Creo2.0动态机构仿真建模方法及思路。
本标准适用于公司产品结构设计选用。
2 Creo2.0机构模块简介在进行机械设计时,建立模型后设计者往往需要通过虚拟的手段,在电脑上模拟所设计的机构,来达到在虚拟的环境中模拟现实机构运动的目的。
对于提高设计效率降低成本有很大的作用。
Creo Parametric 2.0中“机构”模块是专门用来进行运动仿真和动态分析的模块。
design(机械设计)和Mechanism dynamics(机械动态)两个方面的分析功能。
在装配环境下定义机构的连接方式后,单击菜单栏菜单“应用程序”→“机构”,如图1-1所示。
系统进入机构模块环境,呈现图1-2所示的机构模块主界面:菜单栏增加如图所示的“机构”下拉菜单,模型树增加了如图所示“机构”一项内容,窗口上边出现如图1-3所示的工具栏图标。
下拉菜单的每一个选项与工具栏每一个图标相对应。
用户既可以通过菜单选择进行相关操作。
也可以直接点击快捷工具栏图标进行操作。
图1-1 由装配环境进入机构环境图1图1-2 机构模块下的主界面图图1-3 机构菜单如图 1-4所示的“机构树”工具栏图标和图1-3中下拉菜单各选项功能解释如下:设置。
凸轮:打开“凸轮从动机构连接”对话框,使用此对话框可创建新的凸轮从动机构,也可编辑或删除现有的凸轮从动机构。
3D 接触:打开“3D接触从动机构连接”对话框,使用此对话框可创建新的3D接触从动机构,也可编辑或删除现有的3D接触从动机构。
齿轮:打开“齿轮副”对话框,使用此对话框可创建新的齿轮副,也可编辑、移除、复制现有的齿轮副。
伺服电动机:打开“伺服电动机”对话框,使用此对话框可定义伺服电动机,也可编辑、移除或复制现有的伺服电动机。
执行电动机:打开“执行电动机”对话框,使用此对话框可定义执行电动机,也可编辑、移除或复制现有的执行电动机。
弹簧:打开“弹簧” 对话框,使用此对话框可定义弹簧,也可编辑、移除或复制现有的弹簧。