第五章能控性、能观性与传递函数
- 格式:pdf
- 大小:306.58 KB
- 文档页数:72

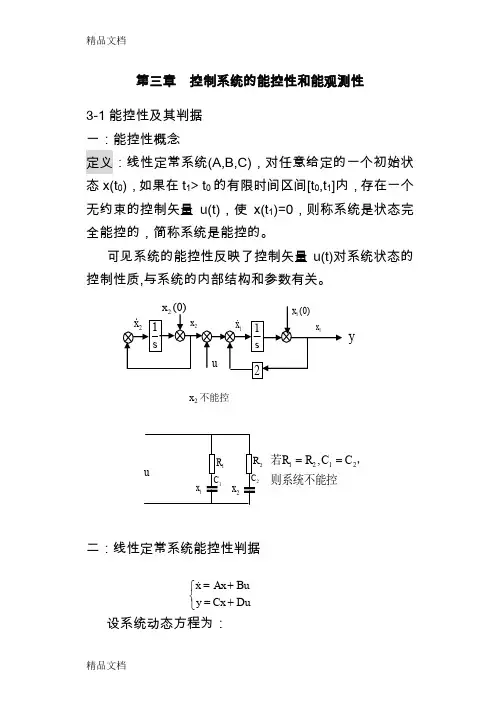
第三章 控制系统的能控性和能观测性3-1能控性及其判据 一:能控性概念定义:线性定常系统(A,B,C),对任意给定的一个初始状态x(t 0),如果在t 1> t 0的有限时间区间[t 0,t 1]内,存在一个无约束的控制矢量u(t),使x(t 1)=0,则称系统是状态完全能控的,简称系统是能控的。
可见系统的能控性反映了控制矢量u(t)对系统状态的控制性质,与系统的内部结构和参数有关。
二:线性定常系统能控性判据设系统动态方程为:x 2不能控y2则系统不能控,若2121,C C R R ==⎩⎨⎧+=+=DuCx y Bu Ax x设初始时刻为t 0=0,对于任意的初始状态x(t 0),有: 根据系统能控性定义,令x(t f )=0,得:即:由凯莱-哈密尔顿定理:令 上式变为:对于任意x(0),上式有解的充分必要条件是Q C 满秩。
判据1:线性定常系统状态完全能控的充分必要条件是:⎰-+=ft f f f d Bu t x t t x 0)()()0()()(τττφφ⎰⎰---=--=-ff t f f t f f d Bu t t d Bu t t x 01)()()()()()()0(τττφφτττφφ⎰--=f t d Bu x 0)()()0(τττφ∑-=-==-1)()(n k kk A A eτατφτ∑⎰⎰∑-=-=-=-=101)()()()()0(n k t k k t n k k k ff d u B A d Bu A x ττταττταkt k u d u f=⎰)()(ττταUQ u u u u B A B A AB B Bu A x c k n n k kk -=⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡-=-=--=∑ 321121],,,[)0(能控性矩阵Q C =[B ,AB ,A 2B ,…A n-1B]满秩。
对于单输入系统,Q C =[b ,Ab ,A 2b ,…A n-1b] 如果系统是完全能控的,称(A 、B )或(A 、b )为能控对。

《现代控制理论》第5章习题解答5.1 已知系统的状态空间模型为Cx y Bu Ax x =+=, ,画出加入状态反馈后的系统结构图,写出其状态空间表达式。
答:具有状态反馈的闭环系统状态空间模型为:u Kx =−+v ()xA BK x Bv y Cx=−+=相应的闭环系统结构图为闭环系统结构图5.2画出状态反馈和输出反馈的结构图,并写出状态反馈和输出反馈的闭环系统状态空间模型。
答:具有状态反馈的闭环系统状态空间模型为u Kx =−+v ()xA BK x Bv y Cx=−+=相应的反馈控制系统结构图为具有输出反馈的闭环系统状态空间模型为u Fy =−+v ()x A BFC x Bv y Cx=−+=相应的反馈控制系统结构图为后案网 ww w.kh d5.3 状态反馈对系统的能控性和能观性有什么影响?输出反馈对系统能控性和能观性的影响如何?答:状态反馈不改变系统的能控性,但不一定能保持系统的能观性。
输出反馈不改变系统的能控性和能观性。
5.4 通过检验能控性矩阵是否满秩的方法证明定理5.1.1。
答:加入状态反馈后得到闭环系统K S ,其状态空间模型为()x A BK x Bv y Cx=−+=开环系统的能控性矩阵为0S 1[,][]n c A B BAB A B −Γ="闭环系统K S 的能控性矩阵为 1[(),][()()]n cK A BK B B A BK B A BK B −Γ−=−−"由于222()()()()(A BK B AB BKBA BKB A ABK BKA BKBK B)A B AB KB B KAB KBKB −=−−=−−+=−−−#以此类推,总可以写成的线性组合。
因此,存在一个适当非奇异的矩阵U ,使得()m A BK B −1,,,m m A B A B AB B −[(),][,]cK c A BK B A B U Γ−=Γ由此可得:若rank([,])c A B n Γ=,即有个线性无关的列向量,则n [(),]cK A BK B Γ−也有个线性无关的列向量,故n rank([(),])cK A BK B n Γ−=5.5 状态反馈和输出反馈各有什么优缺点。
传递函数存在零极点对消,系统能控能观[中括号]:传递函数的零极点对消对系统的控制与观测性引言传递函数是描述连续时间线性时不变系统的数学工具,它能够帮助我们理解系统的特性以及系统的控制能力和观测性。
传递函数中的零点和极点对系统的控制和观测性起着关键作用。
本文将通过详细的步骤和分析,探讨传递函数中零极点对消的概念,以及如何实现系统的控制和观测能力。
一、传递函数的定义与实例传递函数是描述系统输入与输出关系的函数,它可以表示为H(s)=N(s)/D(s),其中N(s)和D(s)分别是系统的分子部分和分母部分。
作为一个例子,我们考虑一个简单的一阶系统传递函数H(s)=1/(s+1)。
二、传递函数的零点和极点传递函数中的零点和极点是指使得传递函数取得零值和无穷值的输入信号。
对于上述的例子H(s)=1/(s+1),传递函数的极点为s=-1。
极点的位置对系统的动态响应和稳定性具有重要影响。
三、传递函数的零极点对系统稳定性和控制性的影响传递函数的极点位置决定了系统的稳定性。
如果系统的所有极点都位于左半平面,则系统是稳定的。
相反,如果系统的极点存在于右半平面,系统则是不稳定的。
对于例子H(s)=1/(s+1)来说,它的极点位于s=-1,因此系统是稳定的。
另一方面,传递函数的零点位置对系统的控制性能有着重要影响。
零点相当于系统对输入信号的特殊灵敏度,它们可以导致更好的系统响应和稳定性。
如果系统具有零点,那么对于某些输入信号,系统可以减小或者抵消输出信号。
对于例子H(s)=1/(s+1)来说,系统没有零点,因此无法通过零极点对消的方法来控制输出。
四、零极点对消的概念与实现零极点对消是一种通过调整传递函数中的参数,使得系统的零点和极点相互抵消,从而改变系统的特性和性能的方法。
这种方法可以用于增加或减小系统对某些输入信号的灵敏度,提高系统的控制性能。
具体实现零极点对消方法有很多种,这里我们以反馈控制为例进行说明。
反馈控制可以通过引入额外的控制信号和传递函数来改变系统的特性。
第一章习题答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
11K s K K p +sK s K p 1+s J 11sK n 22s J K b -++-+-)(s θ)(s U 图1-27系统方块结构图解:系统的模拟结构图如下:)(s U )(s θ---+++图1-30双输入--双输出系统模拟结构图1K pK K 1pK K 1+++pK n K ⎰⎰⎰11J ⎰2J K b ⎰⎰-1x 2x 3x 4x 5x 6x系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===∙∙∙∙∙∙令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∙∙∙∙∙∙654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp n p b1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
R1L1R2L2CU---------Uc---------i1i2图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:∙∙∙+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=∙∙∙写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CC L L R L L R x x x 。
第五章 状态反馈和状态观测器3-5-1 已知系统结构图如图题3-5-1图所示。
(1)写出系统状态空间表达式;(2)试设计一个状态反馈矩阵,将闭环极点特征值配置在j 53±-上。
)(t y题3-5-1图【解】:方法一:根据系统结构直接设状态变量如题3-5-1图所示,写状态空间表达式:[]x y u x x10112101=⎥⎦⎤⎢⎣⎡-+⎥⎦⎤⎢⎣⎡--=23111=⎥⎦⎤⎢⎣⎡--=cc Urank U系统能控,可以设计状态反馈阵。
设状态反馈阵为][21k k K = 状态反馈控制规律为:Kxr u -=求希望特征多项式:34625)3()(*22++=++=s s s s f求加入反馈后的系统特征多项式:)22()3()(1212k s k k sbK A sI s f ++-++=+-=依据极点配置的定义求反馈矩阵:]1316[131634)22(6)3(21112=⎩⎨⎧==⇒⎩⎨⎧=+=+-K k k k k k方法二:[][][]1316)346(311110)(*10211=++⎥⎦⎤⎢⎣⎡--==--I A AA f U K c方法三:(若不考虑原受控对象的结构,仅从配置极点位置的角度出发) 求系统传递函数写出能控标准型:2321)111()()(2++-=+-+=s sss s s U s Y[]xy u x x10103210-=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=求系统希望特征多项式:34625)3()(*22++=++=s s s s f求状态反馈矩阵K ~:[][][]33236234~21=--==k k K[][][][]5.05.031111010111=⎥⎦⎤⎢⎣⎡--==--Ab b P⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡=105.05.011A P P P[]1316~==P K K【解】:依据系统传递函数写出能控标准型sss s s s s U s Y 2310)2)(1(10)()(23++=++=[]xy u x x0010100320100010=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=求系统希望特征多项式:464]1)1)[(2()(*232+++=+++=s s s s s s f求状态反馈矩阵:[][][]144342604321=---==k k k K 。