线性离散系统的分析
- 格式:ppt
- 大小:1.78 MB
- 文档页数:50
精心整理----------2007--------------------一、(22分)求解下列问题: 1. (3分)简述采样定理。
解:当采样频率s ω大于信号最高有效频率h ω的2倍时,能够从采样信号)(*t e 中 完满地恢复原信号)(t e 。
(要点:h s ωω2>)。
2.(3分)简述什么是最少拍系统。
解:在典型输入作用下,能以有限拍结束瞬态响应过程,拍数最少,且在采样时刻上无稳态误差的随动系统。
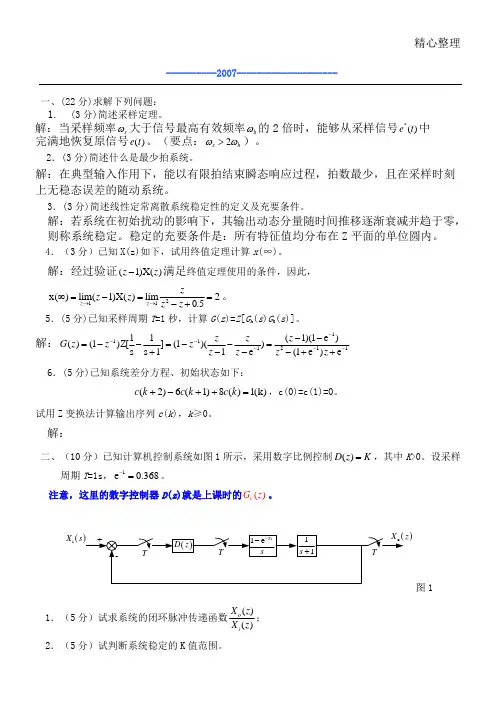
3.(34.(x()∞5.(5解:(G 6.(5试用Z 解:二、((i X s )z 图11.(5分)试求系统的闭环脉冲传递函数()()o i X z X z ; 2.(5分)试判断系统稳定的K 值范围。
解:1.101111111()(1)(1)11(1)1(1)()1e11e 1e G G z z Z s s z Z s s z z z z z z z e z -------⎡⎤=-⎢⎥+⎣⎦⎡⎤=--⎢⎥+⎣⎦=-----=---=-11010*******1e ()()e 1e ()1()1e (1e )(e )(1e )(1e )e e o i K X z KG G z z X z KG G z K z K z K K z K K ------------==-++--=-+--=-+- 2.(5三、(8已知(z)1Φ=1.(3分)简述离散系统与连续系统的主要区别。
解:连续系统中,所有信号均为时间的连续函数;离散系统含有时间离散信号。
2.(3分)简述线性定常离散系统的脉冲传递函数的定义。
解:在系统输入端具有采样开关,初始条件为零时,系统输出信号的Z 变换与输入信号的Z 变换之比。
3.(3分)简述判断线性定常离散系统稳定性的充要条件。
解:稳定的充要条件是:所有特征值均分布在Z 平面的单位圆内。
4.(5分)设开环离散系统如图所示,试求开环脉冲传递函数)(z G 。
解:22522510252510()[[25e e (e e )eT T T T Tz z z G z Z Z s s z z z z -----=⨯==++---++ 5.(5分)已知系统差分方程、初始状态如下:0)(2)1(3)2(=++++k c k c k c ,c(0)=0,c(1)=1。
实验六 离散线性时不变系统分析一、 实验目的1. 掌握离散LSI 系统的单位序列响应、单位阶跃响应和任意激励下响应的MATLAB 求解方法。
2. 掌握离散LSI 系统的频域分析方法;3. 掌握离散LSI 系统的复频域分析方法;4. 掌握离散LSI 系统的零极点分布与系统特性的关系。
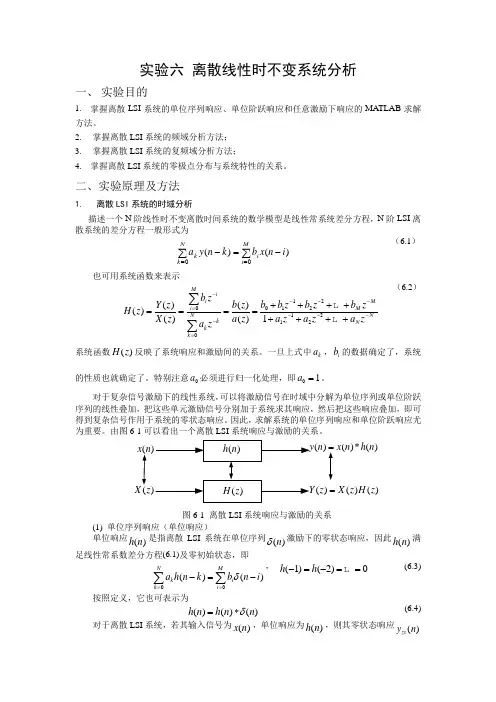
二、实验原理及方法1.离散LSI 系统的时域分析描述一个N 阶线性时不变离散时间系统的数学模型是线性常系统差分方程,N 阶LSI 离散系统的差分方程一般形式为)()(0i n x b k n y a Mi i N k k -=-∑∑== (6.1) 也可用系统函数来表示12001212120()()()()()1MiM ii M NNkN k k b zb b z b z b z Y z b z H z X z a z a z a z a z a z----=----=++++====++++∑∑ (6.2)系统函数()H z 反映了系统响应和激励间的关系。
一旦上式中k a ,i b 的数据确定了,系统的性质也就确定了。
特别注意0a 必须进行归一化处理,即01a =。
对于复杂信号激励下的线性系统,可以将激励信号在时域中分解为单位序列或单位阶跃序列的线性叠加,把这些单元激励信号分别加于系统求其响应,然后把这些响应叠加,即可得到复杂信号作用于系统的零状态响应。
因此,求解系统的单位序列响应和单位阶跃响应尤为重要。
由图6-1可以看出一个离散LSI 系统响应与激励的关系。
()h n ()H z ()x n ()X z ()()()Y z X z H z =()()*()y n x n h n =图6-1 离散LSI 系统响应与激励的关系(1) 单位序列响应(单位响应)单位响应()h n 是指离散LSI 系统在单位序列()n δ激励下的零状态响应,因此()h n 满足线性常系数差分方程(6.1)及零初始状态,即()()N Mkik i a h n k b n i δ==-=-∑∑, (1)(2)0h h -=-== (6.3)按照定义,它也可表示为()()()h n h n n δ=* (6.4) 对于离散LSI 系统,若其输入信号为()x n ,单位响应为()h n ,则其零状态响应()zsy n为()()*()zs y n x n h n = (6.5)可见,()h n 能够刻画和表征系统的固有特性,与何种激励无关。
§10-4 线性离散系统的分析前面讨论了线性离散系统的数学模型:一种是输入输出模型,一种是状态空间模型。
本节将要根据这些数学模型来分析线性离散系统的特性,例如稳定性、能控性和能观测性。
一、稳定性稳定性是动力学系统的一个十分重要的性质。
本节只讨论线性定常系统的稳定性,而时变系统的稳定性问题是比较复杂的。
有两大类的稳定性分析方法。
一类是分析离散系统极点在z 平面内的位置。
一个闭环系统是稳定的充分必要条件是其特征方程的全部根都必须分布在z 平面内以原点为圆心的单位圆内。
当然,我们可以用直接的方法求出特征方程,然后再求出其根(例如用贝尔斯特-牛顿叠代法)。
但是在工程上希望不经过解特征方程而找到一些间接的方法,例如代数判据法,基于频率特性分析的奈奎斯特法,或通过双线性变换把z 平面问题变成s 平面的问题,再用连续系统的稳定判据。
另一类研究稳定性的方法是李雅普诺夫第二方法,它规定了关于稳定性的严格定义和方法。
本节只介绍代数判据法。
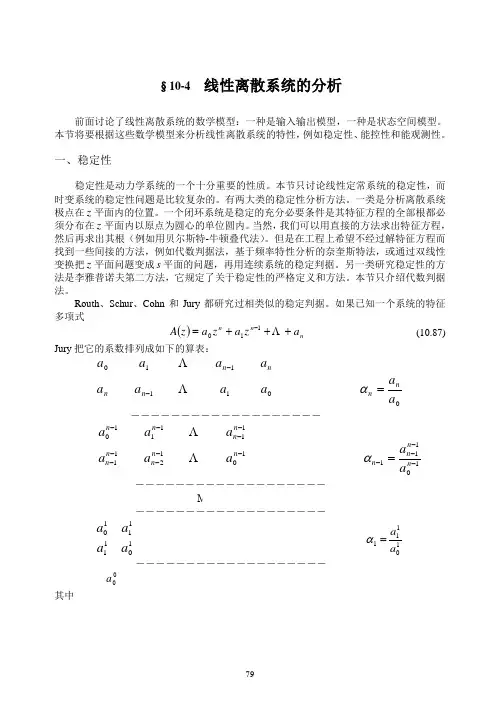
Routh 、Schur 、Cohn 和Jury 都研究过相类似的稳定判据。
如果已知一个系统的特征多项式()n n na za z a z A +++=- 110 (10.87)Jury 把它的系数排列成如下的算表:11110a a a a a a a a a a nn n nn n =--α―――――――――――――――――――10111101211111110-------------=n n n n n n n n n n n n n a a aaaa a a α――――――――――――――――――――――――――――――――――――――10111110a a a a 10111a a =α―――――――――――――――――――0a 其中kk i k kik k k i k i a a a a a a 01=-=--α表中第一行和第二行分别是(10.87)中的系数按正序和倒序排列的。
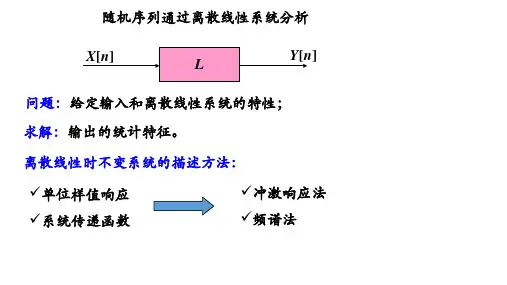
问题:给定输入和离散线性系统的特性;求解:输出的统计特征。
✓冲激响应法✓频谱法]离散线性时不变系统的描述方法:✓单位样值响应✓系统传递函数⏹冲激响应法⏹频谱法⏹常用时间序列模型][][][][][]k Y n h k X n k h n X n +∞=−∞=−=∗∑系统输出:均值:[]([])([()])[][]Y X m n E Y n E L X n h n m n ===∗X m []Y n[,][][][,]121212Y X R n n h n h n R n n =∗∗[,]([][])[][,]1212212XY X R n n E X n Y n h n R n n ==∗相关函数:][][][][][]k Y n h k X n k h n X n +∞=−∞=−=∗∑系统输出:[][][]XY X R m h m R m =−∗[][][][]Y X R m h m h m R m =−∗∗[]()0Y X X k m m h k m H +∞=−∞=∑若X [n ]平稳:则输出平稳,而且输入输出联合平稳2. 频谱法若X [n ]平稳:2()()()|()|()Y XY X G H G H G ωωωωω==*()()()XY X G H G ωωω=1()()()XY X G z H z G z −=1()()()()()()Y XY X G z H z G z H z H z G z −==若用z 变换表示:则输出平稳,而且输入输出联合平稳只适用于平稳随机序列的分析例1:一个平稳随机序列X[n]的自相关函数为,线性系统的单位样值响应是, 求输出Y(n)的自相关函数及功率谱密度。
2[]m σδ[],nh n r =0,||1n r ≥<[][][][]Y X R m h m h m R m =−∗∗2[][]h m h m =−∗σ222201mm k k r r r r ∞==−∑σσ[解]20k m kk r r ∞+=⋅∑σ当m ≧0时,例1:一个平稳随机序列X[n]的自相关函数为,线性系统的单位样值响应是, 求输出Y(n)的自相关函数及功率谱密度。
线性离散控制系统的稳定性分析在控制工程中,稳定性是占据重要地位的概念之一。
对于线性离散控制系统而言,稳定性分析显得尤为关键。
在本文中,我们将讨论线性离散控制系统的稳定性分析。
线性离散控制系统由两个部分组成,一个是系统本身,另一个是控制器。
这两个部分共同作用,以使系统能够正常运行,达到预定的控制目标。
而稳定性则是在这一过程中,确保系统在特定的条件下能够保持稳定。
线性离散控制系统一般是在时刻 t 时,通过一个输入信号 u(t) 来控制输出信号 y(t)。
由此可以得到系统的状态空间方程式:x(t+1) = Ax(t) + Bu(t)y(t) = Cx(t)其中,x(t) 是状态向量,它包含系统中所有的状态信息。
A 和B 是状态转移矩阵,用于描述状态向量在时间上的演变。
C 则是输出端的转移矩阵,用于描述系统输出与状态向量之间的关系。
而 u(t) 则是控制器的输入信号,通过控制器的处理,最终得到系统的输出 y(t)。
对于任意给定的系统,其稳定性是需要依据系统本身的特性来分析的。
这里我们将从两个方面来讨论线性离散控制系统的稳定性分析。
分别为:利用特征值和易于分析的特殊情况。
一、利用特征值进行稳定性分析通过特征值,可以很方便地判断一个系统是否稳定。
特征值的计算公式如下:det(A-λI) = 0其中,det() 是矩阵的行列式,A 是状态转移矩阵,λ 是特征值,I 是单位矩阵。
特征值通常是由状态转移矩阵的特征多项式所产生的根。
如果计算出来的特征值都处于单位圆内,那么这个系统就是稳定的。
反之,如果特征值的模超过了 1,则这个系统就是不稳定的。
此外,还存在一种特殊情况,即状态转移矩阵的特征值都是实数。
在这种情况下,我们只需要检测特征值是否位于区间 [-1,1] 中即可。
如果全部都满足此条件,那么系统就是稳定的。
二、特殊情况下的稳定性分析对于线性离散控制系统而言,有一些特殊情况下可以使用更为简便的方法来进行稳定性分析。
离散控制系统的稳定性分析方法离散控制系统是指系统状态的变化是以离散的方式进行的控制系统。
在实际工程中,我们经常需要对离散控制系统进行稳定性分析,以确保系统的可靠性和正常工作。
本文将介绍几种常用的离散控制系统的稳定性分析方法。
一、特征方程法特征方程法是离散控制系统稳定性分析中使用最广泛的方法之一。
特征方程反映了离散系统的稳态响应特性。
对于一个线性离散控制系统,其特征方程可以通过以下公式表示:G(z) = N(z)/D(z)其中,N(z)和D(z)分别是分子和分母多项式。
为了分析系统的稳定性,我们需要求解特征方程的根。
通常情况下,离散系统稳定的充要条件是特征方程的所有根的模都小于1。
二、相位平面法相位平面法是另一种常用的离散控制系统稳定性分析方法。
通过绘制系统的相位平面图,我们可以直观地了解系统的稳定性。
相位平面图以根轨迹的形式表示,根轨迹是特征方程的根随着参数的改变而移动的轨迹。
相位平面图的绘制过程可以通过以下步骤完成:1. 根据特征方程,将根轨迹的初始点和终点确定在单位圆上;2. 根据特征方程的根的个数,确定根轨迹的曲线走向;3. 绘制根轨迹,并观察根轨迹与单位圆的交点。
通过相位平面法,我们可以直观地判断系统的稳定性。
当根轨迹上的点都位于单位圆内部时,系统为稳定。
而当根轨迹上的点位于单位圆外部时,系统为不稳定。
三、频域法频域法是利用频率响应函数来分析系统稳定性的方法。
频率响应函数是指在系统输入为正弦信号时,输出的幅值和相位与输入频率之间的关系。
常用的频域法包括傅里叶变换法、拉普拉斯变换法等。
在频域法中,我们可以通过绘制系统的频率响应曲线来分析系统的稳定性。
通常情况下,稳定的离散控制系统的频率响应曲线在低频段有较大的增益,而在高频段有较小的增益。
综上所述,离散控制系统的稳定性分析方法包括特征方程法、相位平面法和频域法等。
不同的方法适用于不同的系统,我们可以根据实际需求选择合适的方法进行分析。
通过稳定性分析,我们可以确保离散控制系统的可靠性和正常运行。