线性离散系统状态方程的解
- 格式:ppt
- 大小:222.00 KB
- 文档页数:22
1、我国人民哪些发明属于在经典控制理论萌芽阶段的发明?(AB)A 指南车B 水运仪象台C 指南针D 印刷术2、经典控制理论也可以称为(BD)A 现代控制理论B 自动控制理论C 近代控制理论D 古典控制理论3、以下哪些内容属于现代控制理论基础的内容?(AB)A 李雅普诺夫稳定性理论B 极小值原理C 频率响应法D 根轨迹法4 、传递函数模型假设模型初值不为零。
(✖)5 、传递函数描述的是单输入单输出的外部描述模型。
(✖)6 、线性系统理论属于现代控制理论的知识体系中数学模型部份。
(✔)7 、最优控制理论属于现代控制理论的知识体系中估计方法部份。
(✖)8、控制科学的意义下,现代控制理论主要研究(数学建模)和(控制理论方法) 的科学问题。
9 、现代控制理论在整个控制理论发展中起到了(承上起下)的作用。
10、除了稳定性外,现代控制理论基础还考虑系统(能控性)和(能观测性)两个内部特性。
一、现代控制理论作为一门科学技术,已经得到了广泛的运用。
你还知道现代控制理论具体应用到哪些具体实际的例子么?1、关于输出方程,下列哪些说法是正确的?(BD)A 输出方程中状态变量必须是一阶的B 输出方程中不含输入的任何阶倒数C 输出方程中输入变量可以是任意阶的D 输出方程中不含状态变量的任何阶倒数2、关于系统的动态方程,下列哪些说法是正确的?(AB)A 系统的状态方程的状态变量的个数是惟一的B 系统输出方程的输入输出变量是惟一的C 系统输出方程的输入输出变量是不惟一的D 系统的状态方程的状态变量是惟一的3、对于一个有多个动态方程表示的系统,下列说法正确的是?(AC)A 这些动态方程一定是等价的B 这些动态方程经过线性变化后,不能转化为一个动态方程C 这些动态方程经过线性变化后,可以转化为一个动态方程D 这些动态方程不一定是等价的4、选取的状态向量是线性相关的(✖)5、状态向量的选取是不惟一的(✔)6、状态向量的个数是不惟一的(✖)7、输出方程的选取是不惟一的(✔)8、(系统的输出量与状态变量、输入变量关系的数学表达式)称为输出方程。
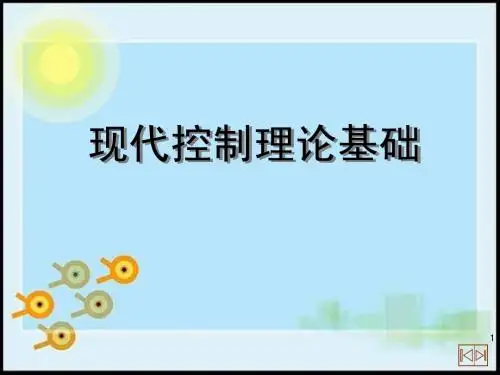
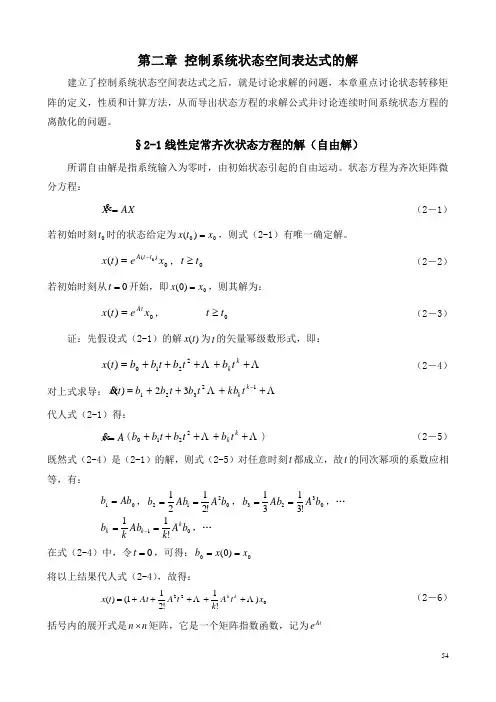
第二章 控制系统状态空间表达式的解建立了控制系统状态空间表达式之后,就是讨论求解的问题,本章重点讨论状态转移矩阵的定义,性质和计算方法,从而导出状态方程的求解公式并讨论连续时间系统状态方程的离散化的问题。
§2-1线性定常齐次状态方程的解(自由解)所谓自由解是指系统输入为零时,由初始状态引起的自由运动。
状态方程为齐次矩阵微分方程:AX X= (2-1)若初始时刻0t 时的状态给定为00)(x t x =,则式(2-1)有唯一确定解。
0)(0)(x e t x t t A -=,0t t ≥(2-2)若初始时刻从0=t 开始,即0)0(x x =,则其解为:0)(x e t x At =, 0t t ≥(2-3)证:先假设式(2-1)的解)(t x 为t 的矢量幂级数形式,即:+++++=k k t b t b t b b t x 2210)((2-4)对上式求导: ++++=-1232132)(k k t kb t b t b b t x代人式(2-1)得:A x= ( +++++kk t b t b t b b 2210) (2-5)既然式(2-4)是(2-1)的解,则式(2-5)对任意时刻t 都成立,故t 的同次幂项的系数应相等,有:01Ab b =,0212!2121b A Ab b ==,0323!3131b A Ab b ==,… 01!11b A k Ab kb k k k ==-,… 在式(2-4)中,令0=t ,可得:00)0(x x b == 将以上结果代人式(2-4),故得:022)!1!211()(x t A k t A At t x k k +++++= (2-6)括号内的展开式是n n ⨯矩阵,它是一个矩阵指数函数,记为At e221112!!At k ke At A t A t K =+++++ (2-7)式(2-6)可表示为:0()At x t e x =再用)(0t t -代替)0(-t ,即在代替t 的情况下,同样证明0)(0)(x e t x t t A -=的正确性。

第一章1.1 计算机控制系统是怎么样分类的?按功能和控制规律可各分几类?答:计算机控制系统可按功能分类,按控制规律分类和按控制方式分类。
按功能计算机控制系统的分类:(1)数据处理系统。
(2)直接数字控制(简记为DDC)。
(3)监督控制(简记为SCC)。
(4)分级控制。
(5)集散控制。
(6)计算机控制网络。
按照控制规律计算机控制系统的分类:(1)程序和顺序控制。
(2)比例积分微分控制(简称PID控制)。
(3)有限拍控制。
(4)复杂规律控制。
(5)智能控制。
1.2 计算机控制系统由哪些部分组成?并画出方框图。
答:计算机控制系统由控制对象、执行器、测量环节、数字调节器及输入输出通道等组成。
方框图:P115 图1.21 输出反馈计算机控制系统1.9 简述采样定理及其含义。
答:采样定理:如果采样角频率ωω=2π/T大于2ωmax,即ωω≥2ωmax,则采样的离散信号ω∗(t)能够不失真地恢复原来的连续信号y(t)。
式中ωmax是连续信号y(t)的频谱特性中的最高角频率。
含义:要使采样信号ω∗(t)能够不失真地恢复原来的连续信号y(t),必须正确选择采样角频率,使ωω≥2ωmax1.10 多路巡回检测时,采样时间τ,采样周期T和通道数N之间的关系。
答:采样时间是足够短的时间,y(kT)≈y(kT+?t),0<?t<ωω。
应满足 T≥Nωω。
1.12 设有模拟信号(0~5)V 和(2.5~5)V ,分别用8位、10位和12位A/D 转换器,试计算并列出各自的量化单位和量化误差。
答:量化单位q=ωωωω∗−ωωωω∗2ω−1≈ωωωω∗−ωωωω∗2ω,量化误差ε=q /2根据以上公式可求得(0~5)V :(2.5~5)V :1.14 试述数模转换器的作用?如何选择转换器的位数?答:数模转换器把数字量u(kT)转换成离散的模拟量ω∗(t)。
转换的精度取决模-数转换器的位数n ,当位数足够多时,转换可以达到足够高的精度。
第一章1.1 计算机控制系统是怎么样分类的?按功能和控制规律可各分几类?答:计算机控制系统可按功能分类,按控制规律分类和按控制方式分类。
按功能计算机控制系统的分类:(1)数据处理系统。
(2)直接数字控制(简记为DDC)。
(3)监督控制(简记为SCC)。
(4)分级控制。
(5)集散控制。
(6)计算机控制网络。
按照控制规律计算机控制系统的分类:(1)程序和顺序控制。
(2)比例积分微分控制(简称PID控制)。
(3)有限拍控制。
(4)复杂规律控制。
(5)智能控制。
1.2 计算机控制系统由哪些部分组成?并画出方框图。
答:计算机控制系统由控制对象、执行器、测量环节、数字调节器及输入输出通道等组成。
方框图:P115 图1.21 输出反馈计算机控制系统1.9 简述采样定理及其含义。
答:采样定理:如果采样角频率=2/T大于2,即≥2,则采样的离散信号(t)能够不失真地恢复原来的连续信号y(t)。
式中是连续信号y(t)的频谱特性中的最高角频率。
含义:要使采样信号(t)能够不失真地恢复原来的连续信号y(t),必须正确选择采样角频率,使≥1.10 多路巡回检测时,采样时间,采样周期T和通道数N之间的关系。
答:采样时间是足够短的时间,y(kT)y(kT+),0<<。
应满足 T≥N。
1.12 设有模拟信号(0~5)V和(2.5~5)V,分别用8位、10位和12位A/D转换器,试计算并列出各自的量化单位和量化误差。
答:量化单位q=,量化误差量化误差(2.5)V量化误差1.14 试述数模转换器的作用?如何选择转换器的位数?答:数模转换器把数字量u(kT)转换成离散的模拟量(t)。
转换的精度取决模-数转换器的位数n,当位数足够多时,转换可以达到足够高的精度。
1.19 计算机控制系统有哪些主要的性能指标?如何衡量?答:计算机控制系统主要有动态指标,稳态指标和综合指标1.20 如何衡量系统的稳定性?答:用相角裕量和幅值裕量来衡量计算机控制系统的稳定程度。
状态变量分析法的优点:1. 便于观察系统内部某些物理量的变化过程;2. 与系统的复杂程度无关,复杂系统和简单系统的数学模型相似,适于多输入多输出系统;3. 适于研究非线性或时变系统。
因为一阶微分方程或差分方程是研究非线性和时变系统的有效方法。
4. 便于研究系统的稳定性、可控性、可观测性及系统内部参数变化对系统特性的影响;5. 状态方程都是一阶微分方程或差分方程,便于采用数值解法在计算机上实现系统分析。
系数矩阵由系统的参数决定,非时变系统为常数,时变系统为时间的函数。
,A B 四、输出方程(output equation))(,),(),(21t y t y t y r Λ输出方程是由状态变量和激励信号的线性方程,因此对线性系统而言,输出方程是一组线性方程。
例如,假设系统有个输出,r mrm r r n rn r r r mm n n mm n n e d e d e d x c x c x c t y e d e d e d x c x c x c t y e d e d e d x c x c x c t y +++++++=+++++++=+++++++=ΛΛMΛΛΛΛ22112211222212122221212121211112121111)()()(则,A B矩阵形式为:)(10081910120010321'3'2'1t e x x x x x x ⎥⎥⎦⎤⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎦⎤⎢⎢⎣⎡---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡01000112198⎡⎤⎢⎥∴=⎢⎥⎢⎥---⎣⎦A 依此方法选择的状态变量常称为相变量状态变量,状态方程叫相变量状态方程。
状态方程和输出方程中的系数矩阵与输入输出方程有关。
[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=3210410)(x x x t y 001⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦B []1040=C 0=D矩阵形式为:1211012110''13'22'1)()(+--+++=+----====m m n n n nn x b x b x b t y t e x a x a x a x x xx x x x ΛΛM )(1000100010211210''2'1t e x x x a a a a x x x n n n ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡-M M ΛM ΛΛM[]001111n n n n n nb b a b b a b b a b --∴=---=C D L 当时,矩阵不再为0。