现代控制理论第三章
- 格式:pdf
- 大小:464.72 KB
- 文档页数:99
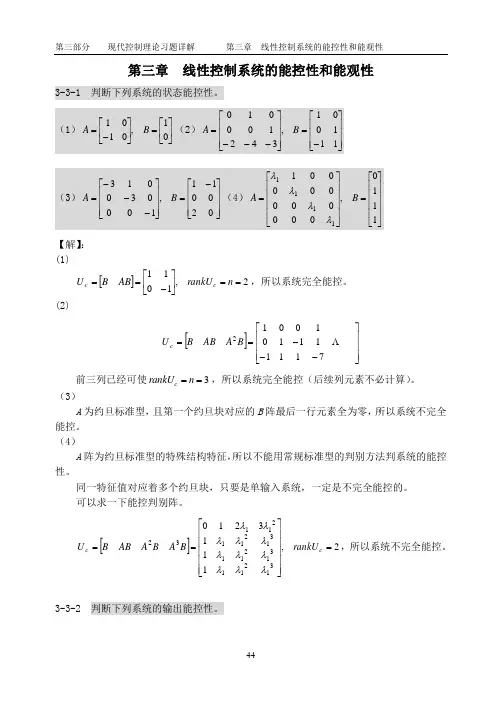
第三章 线性控制系统的能控性和能观性3-3-1 判断下列系统的状态能控性。
(1)⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡-=01,0101B A (2)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=111001,342100010B A (3)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=020011,100030013B A (4)⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=1110,0000000011111B A λλλλ 【解】:(1)[]2,1011==⎥⎦⎤⎢⎣⎡-==n rankU AB BU c c ,所以系统完全能控。
(2)[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---==7111111010012B A ABBU c 前三列已经可使3==n rankU c ,所以系统完全能控(后续列元素不必计算)。
(3)A 为约旦标准型,且第一个约旦块对应的B 阵最后一行元素全为零,所以系统不完全能控。
(4)A 阵为约旦标准型的特殊结构特征,所以不能用常规标准型的判别方法判系统的能控性。
同一特征值对应着多个约旦块,只要是单输入系统,一定是不完全能控的。
可以求一下能控判别阵。
[]2,111321031211312113121121132=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡==c c rankU B A BA AB BU λλλλλλλλλλλ,所以系统不完全能控。
3-3-2 判断下列系统的输出能控性。
(1) ⎪⎪⎪⎩⎪⎪⎪⎨⎧⎥⎦⎤⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=xy u x x 011101020011100030013 (2) []⎪⎪⎩⎪⎪⎨⎧=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=x y u x x 0011006116100010【解】: (1)已知⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=020011,100030013B A ,⎥⎦⎤⎢⎣⎡-=011101C ,⎥⎦⎤⎢⎣⎡=0000D []⎥⎦⎤⎢⎣⎡--=111300002B CA CAB CB D前两列已经使[]22==m B CA CAB CB D rank ,所以系统输出能控。
2.6 可控性与可观性262.6.1 概述经典控制论中:系统用传递函数描述。
只注重输入-输出间的直接关系!低阶系统,输出可控制亦可测量。
可控性与可观性不是问题。
现代控制论中:系统描述:状态方程+输出方程由于状态⇐输入,输出⇐状态所以要控制输出,首先要控制状态并且使输出随状态发生变化输(1)输入⇔状态间的问题:输入是否使状态发生希望的变化?⇓可控性问题要使状态发生某种变化,输入?要使状态发生某种变化,输入=?⇓最优控制问题(2)输出⇔状态间的问题:状态可否从输出得到?⇓可观测性问题如何从输出得到?⇓最优估计问题&可控性、可观性为现代控制理论的基础,例如最优控制与最优估计的基础!&如何处理可控性?可观测性?可控性:系统输入对系统状态的有效控制能力可观性:系统输出对系统状态的确切反映能力问题:状态可控?系统可控?状态不可控?系统不可控?状态可观测系统可测观状态可观测?系统可测观?状态不可观测?系统不可观测?个系统的可控性和可观测性⎡分析如下4个系统的可控性和可观测性:x x 111001/⎥⎤⎢⎡+⎥⎦⎤⎢−−=u dt d []x 11=⎦⎣⎣y x x 101/⎥⎤⎢⎡+⎥⎦⎤⎢⎡−−=u dt d x x 001/⎤⎡+⎤⎡−=u dt d []x 01110=⎦⎣⎣y x 11110=⎥⎦⎢⎣⎥⎦⎢⎣−x x 0111/⎦⎤⎢⎡+⎤⎡−=u dt d []y []x0110=⎥⎣⎥⎦⎢⎣−y⎡x x 111001/⎥⎤⎢⎡+⎥⎦⎤⎢−−=u dt d []x11=⎦⎣⎣y x ∫−1uy12x ∫1−⎡x x 111001/⎥⎤⎢⎡+⎥⎦⎤⎢−−=u dt d []x01=⎦⎣⎣y 1x ∫−yu12x ∫1−⎡x x 101001/⎥⎤⎢⎡+⎥⎦⎤⎢−−=u dt d []x11=⎦⎣⎣y x ∫−y11u2x ∫1−x x 111/⎥⎤⎢⎡+⎥⎦⎤⎢⎡−=u dt d []x01010=⎦⎣⎣−y u∫∫y1x 2x 1−1−2.6.2可控性定义及其判据2.6.2 可控性定义及其判据2.6.2.1可控性定义:可控性定义线性时变连续系统的状态方程为:)()()()()(t t t t t u B x A x+=&fT t ∈状态可控性:对于线性时变连续系统,如果对取定初始时刻的一个存在一个时刻f T t ∈0个非零初始状态,存在个时刻,00)(x t x =[]10,),(t t t t u ∈f T t ∈1和一个无约束的容许控制01t t >使状态由00)(x t x =转移到1t 时的0)(1=t x x t 是可控的。
则称此0在0系统可控性:对于线性时变连续系统,如果所有状态在对于线性时变续系统如果所有状态在)(0f T t ∈则称系统在都是可控的,0t 0t 时刻是完全可控的,也称系统在t 0是可控的。
系统不可控系统不可控:对于线性时变连续系统取定初始时刻对于线性时变连续系统,取定初始时刻如果状态空间中存在一个或一些非零状态在时刻是不可控的则称系统在时刻是不完全可控的0t )(0f T t ∈0t 是不可控的,则称系统在时刻是不完全可控的,也称系统不可控。
0t状态运动的一个定性特性状态运动的个定性特性。
控制的这表明控制量的每个分量应在求控制量u 是容许控制的,这表明控制量的每个分量应在系统系统的可控性与初始时刻的选取无关系统,系统的可控性与初始时刻的选取无关。
&可控性只与系统本身结构有关,与输入量无关!()定义中规定由非零状态转移到零状态如4)定义中规定由非零状态转移到零状态。
如果将其变更为由零状态转移到非零状态,则称这对于线性定常系种情况为状态可达或系统可达。
对于线性定常系统,可控性与可达性等价。
(5)对线性定常连续系统:B A 若系统在)()()(t t t Bu Ax x +=&0)0(x x =0≥t ),0[0∞∈t 则系统在0t 上完全可控。
时刻是完全可控的,),0[0∞∈t26222.6.2.2可控性判据&可控性仅与状态方程中的系统矩阵和控制矩阵有关!(1)Gram 矩阵判据(判别原理?)线性时变连续系统在0t 时刻可控的充要条件为:01t t >使得Gram 矩阵存在某个有限时刻TT t t 1=为非奇异的或是正定的。
τττττd t B B t t t W t ct ),()()(),(),(11010ΦΦ∫为非奇或是定G 线性定常连续系统Gram 矩阵判据:线性定常连续系统G 完全可控的充要条件为:01>t 使如下定义的Gram 矩阵存在时刻t T τd e B B e t W t A T t At c −−∫=10)0,(1为非奇异的或是正定的。
(2)秩判据假设线性时变连续系统的A(t)和B(t)的每个元素分别是n-2和n-1次连续可微函数,并记)()(1t B t B =n i t B t B t A t B i i i ,...3,2),()()()(11=+−=−−&令))(...)()(()(21t B t B t B t M n t =使得01t t >如果存在某个时刻n t rankM t =)(1则该线性时变系统在t 0时刻完全可控线性定常连续系统秩判据线性定常连续系统完全可控的充要条件为:nB A AB B rank n =−)...(1其中n 为系数矩阵A 的阶次系统的可控性矩阵:)...(1B A AB B M n −=&n 行nm 列,如何确定秩为多少?P B l it h H t (3)PBH 判据(Popov-Belevitch-Hautus 判据)线性定常连续系统完全可控的充分必要条件是对系统矩阵的所有特征值),...2,1(n i s i =nB A I s rank i =−)(其中n 为系数矩阵A 的阶次(4)约当规范型判据⎡u B x s⎤0&u B x x +⎥⎢=s ⎦⎣0=),...2,1(n i s i 2)当系统矩阵A 的特征值有相同的x x ˆˆˆˆ&u BA +=其中,设有q-l 个相同特征值1s 有l 个相同特征值q s 其余为互异特征值其余为异特征值⎥⎤⎢⎡s s 10111⎥⎥⎥⎢⎢⎢s 01...1q-l⎥⎥⎥⎢⎢⎢qs s 101ˆ⎥⎥⎥⎥⎢⎢⎢⎢=qs A 01...l⎥⎥⎥⎢⎢⎢+q qs s 01⎥⎥⎥⎢⎢⎢+q s 0...2⎦⎣n则系统可控的充要条件是:(a )的相同特征值部分ˆˆ) 对应于的相同特征值部分,中与每个约当块最后一行相对应的一行元素不全为零;BA (b)对应于互异特征值部分,中没有元素全为零BˆA ˆ小结(可控性判别要素)的行。
小结(可控性判别要素):(1)状态化成零;)仅与状态方程有关(2)仅与状态方程有关;(3)不是求出一个u(t 1) ,而是判断其存在否!2.6.2.3 输出可控性及其判据定义:若在有限时间间隔],[10t t 内,存在无约束分段连续(1)则称此系统是输出完全可控函数u(t),能使任意初始输出y(t 0)转移到任意最终输出y(t1),则称此系统是输出完全可控。
判据:线性定常连续系统的状态方程表达式为:)(t Bu Ax x+=&)()(t t y Du Cx +=系统输出完全可控的充分必要条件是:)...(1D B CA CAB CBM n y −=的秩等输出向量的维数的秩等于输出向量的维数,即=mrankM y2.6.3可观测性定义及其判据2.6.3 可观测性定义及其判据2631可观测性定义2.6.3.1 可观测性定义:设线性时变连续系统的状态方程和输出方程为设线性时变连续系统的状态方程和输出方程为:x&)()()()()()(t t t t y t t t u D x C u B )x A(+=+=f T t ∈00)(x t x =A(t), B(t), C(t) ,D(t) :nn ×rn ×rm ×nm ×系统可观测性:对于线性时变连续系统如果对取定初始时刻对于线性时变连续系统,如果对取定初始时刻f T t ∈0[]10,t t t ∈f T t ∈1存在一个时刻对于所有系统的输出y 能唯一确定状态向量的初值则称系统在时间区间0x 是完全可观测的[]10,t t 简称系统可观测。
简称系统可观测&可观性反映可否通过y(t)确定x(t)问题。
性通y()定()问题&可观性只与系统本身有关,与输入无关!&可观测=可测量?系统不可观测:对于线性时变连续系统,如果对取定初始时刻f T t ∈0[]10,t t t ∈f T t ∈1唯一存在一个时刻对于所有系统的输出y 不能唯确定状态向量的初值则称系统在时间区间是不完全可观测的)(0t x i []10,t t 简称系统不可观测。
2632可观测性判据2.6.3.2 可观测性判据(1)Gram 矩阵判据(判别原理?)时刻可观测的充要条件为:线性时变连续系统在0t 01t t >使得Gram 矩阵存在某个有限时刻τττττd t C C t t t W t t TTot ),()()(),(),(000110ΦΦ=∫为非奇异的或是正定的。
其中:),(0t TτΦ为状态转移矩阵。
线性定常连续系统Gram 矩阵判据:完全可观测的充要条件为,线性定常连续系统01>t 使如下定义的Gram 矩阵存在时刻AtTt tA T 1为非奇异的或是正定的。
τd e C e t W o ∫=01)0,(为非奇异的或是正定的(2)秩判据假设线性时变连续系统的A(t)和B(t)的每个元素分别是n-2和n-1次连续可微函数,并记)()(1t C t C =,...3,2),()()()(11=+=−−i t C t A t C t C i i i &令⎥⎤⎢⎡)(1t C t C ⎥⎥⎥⎢⎢⎢=...)()(2t C t N t 使得01t t >时刻完全可观测如果存在某个时刻⎦⎣)(n nt rankN t =)(1则该线性时变系统在t 0时刻完全可观测。
线性定常连续系统秩判据:线性定常连续系统完全可观测的充要条件为线性定常连续系统完全可观测的充要条件为:⎡n CA C rank rankN =⎥⎥⎤⎢⎢=CA n ⎥⎥⎦⎢⎢⎣−1...称为系统的观测矩阵行列其中n 为系统矩阵A 的阶次N 称为系统的可观测矩阵(几行几列?)。
P B l i h H (3)Popov-Belevitch-Hautus 判据线性定常连续系统完全可观测的充分必要条件是对系统矩阵的所有特征值),...2,1(n i s i =n A I s C rank =⎥⎤⎢⎡−i ⎦⎣其中n 为系统矩阵A 的阶次。