第3章-控制器的控制规律-zhm教学内容
- 格式:ppt
- 大小:1.12 MB
- 文档页数:38
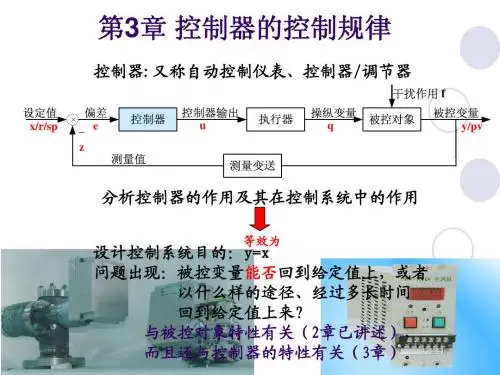
控制器控制规律一、引言控制器是一种用于管理和调节系统或设备运行的设备或程序。
在各个领域,控制器扮演着至关重要的角色。
控制器控制规律是指控制器进行控制时所遵循的规律和原则。
掌握控制器控制规律对于优化系统运行、提高效率至关重要。
二、控制器的分类控制器可以根据其工作原理和功能进行分类。
常见的控制器包括比例控制器、积分控制器、微分控制器和PID控制器等。
1. 比例控制器比例控制器根据输入变量和输出变量之间的比例关系进行控制。
它能够快速响应输入变量的变化,并作出相应的输出调整。
但是,比例控制器无法消除稳定偏差,因此在某些需要稳定控制的系统中可能不太适用。
2. 积分控制器积分控制器基于输入变量的积分值进行控制。
它能够消除稳定偏差,确保系统的稳定性。
积分控制器响应速度较慢,对于快速变化的输入变量可能无法及时作出调整。
3. 微分控制器微分控制器根据输入变量的变化率进行控制。
它能够快速响应输入变量的变化,并通过减小输出变量的变化率实现稳定控制。
微分控制器对于输入变量的噪声较为敏感,可能引入不稳定因素。
4. PID控制器PID控制器综合了比例控制器、积分控制器和微分控制器的优点。
它能够在快速响应输入变量的变化的同时消除稳定偏差,并保持稳定控制。
PID控制器是最常用的控制器之一,在工业自动化和过程控制中广泛应用。
三、控制器控制规律控制器控制规律是指在实际控制过程中,控制器遵循的一系列规律和原则。
以下是一些常见的控制器控制规律。
1. 反馈控制反馈控制是控制器控制规律中的基本原则之一。
通过测量系统的输出变量,并与期望的输出进行比较,控制器可以根据误差来调整系统的输入变量,使系统的输出接近期望值。
反馈控制能够有效地消除系统的偏差,提高系统的稳定性和精度。
2. 执行器动态响应执行器是控制器控制系统的重要组成部分。
执行器的动态响应特性对于系统的稳定性和响应速度起着重要作用。
控制器需要考虑执行器的响应时间、稳定性和鲁棒性等因素,在控制过程中作出相应的调整。
控制器的基本控制规律控制器是现代工业自动化中不可或缺的一种设备,它可以根据预设规律,对各种设备和系统的运行进行控制和监控。
控制器在各种环境中广泛运用,包括工业制造、物流、农业等领域。
一个成功的控制器必须具备基本控制规律,这些规律是控制器能够正确控制操作的关键。
一、稳定性规律稳定性规律是控制器运转的基本规律,它要求控制器对系统的控制应当能够保持系统的稳定性,避免系统发生不稳定或失控的情况。
稳定性规律体现在控制器对系统的控制参数的调整上,控制器需要及时调整、校准各控制参数,保证系统运行稳定性。
常见的稳定性规律控制器有PID控制器和自适应控制器等。
二、追踪规律追踪规律要求控制器能够追踪所需要控制对象的参量,把系统控制到预期的工作状态,并且保持其稳定性。
控制器对于不同的控制对象需要制定对应的控制算法,来保证控制对象参量的准确和稳定。
常见的追踪规律控制器有模糊控制器和神经网络控制器等。
三、纠正规律纠正规律要求控制器能够及时检测到系统中的误差,并能够针对误差采用正确的方式进行纠正。
在系统出现误差的时候,控制器需要对系统进行反馈控制,及时调整控制参数来消除误差。
常见的纠正规律控制器有比例控制器、微分控制器和积分控制器等。
四、适应规律适应规律要求控制器能够适应不同的工况和环境条件,依据不同的工况和环境条件来调节系统的控制参数,确保系统稳定性和优化。
控制器需要不断检测环境条件和工况变化,对控制参数进行动态调整和优化,以达到最佳的运行状态。
常见的适应规律控制器有根轨迹控制器和滑模控制器等。
五、安全规律安全规律是所有控制器智能控制的重要规律。
安全规律要求控制器对工业生产过程中的危险设施或危险工作环境进行监控,以确保生产安全。
此外,在控制器操作过程中,对可能出现的危险情况需要进行相应的控制和预警。
常见的安全规律控制器有安全控制器和故障诊断控制器。
总之,通过这些基本控制规律,控制器能够更加稳定、高效地运行,减小系统出错的概率。
控制器的几种控制规律和控制特点控制器是自动控制系统中的核心组成部分,主要负责接收反馈信号、对比较器进行比较、生成控制信号并输出给被控对象,以实现对被控对象的控制。
控制器的设计需要根据被控对象的特点和控制要求,选择适合的控制规律和控制特点。
一、几种常见的控制规律:1. 比例控制(Proportional Control):比例控制是控制器输出信号与控制误差成比例的关系,控制器的输出值与被控对象的状态量之间存在线性关系。
比例控制具有简单、容易实现的特点,但对于系统的稳定性和精度要求较高时,单独采用比例控制往往无法满足要求。
2. 积分控制(Integral Control):积分控制是通过对控制误差进行积分运算,使控制器输出值与控制误差的积分成正比。
积分控制可以消除稳态误差,提高系统的稳定性和精度。
但积分控制对系统的超调量和响应速度有一定的影响,需要根据具体系统的要求进行调整。
3. 微分控制(Derivative Control):微分控制是通过对控制误差的微分运算,使控制器输出值与控制误差的变化率成正比。
微分控制可以提高系统的响应速度和抑制超调量,但对于噪声信号的影响较大,容易引起系统的不稳定性。
4. 比例积分控制(PI Control):比例积分控制是将比例控制和积分控制相结合,使控制器的输出信号既与控制误差的大小成正比,又与控制误差的积分成正比。
比例积分控制可以消除稳态误差,提高系统的稳定性和精度,并且对于系统的超调量和响应速度的影响相对较小。
5. 比例微分控制(PD Control):比例微分控制是将比例控制和微分控制相结合,使控制器的输出信号既与控制误差的大小成正比,又与控制误差的变化率成正比。
比例微分控制可以提高系统的响应速度和抑制超调量,但对于系统的稳态误差的消除作用较小。
二、不同控制规律的特点:1. 比例控制的特点是简单、容易实现,并且对系统的稳定性和精度要求较低。
但对于系统的超调量和响应速度的影响较大,无法消除稳态误差。