控制器基本控制规律
- 格式:pptx
- 大小:1.98 MB
- 文档页数:23
比例、积分、微分控制策略尽管不同类型的控制器,其结构、原理各不相同,但是基本控制规律只有三个:比例(P)控制、积分(I)控制和微分(D)控制。
这几种控制规律可以单独使用,但是更多场合是组合使用。
如比例(P)控制、比例-积分(PI)控制、比例-积分-微分(PID)控制等。
比例(P)控制单独的比例控制也称“有差控制”,输出的变化与输入控制器的偏差成比例关系,偏差越大输出越大。
实际应用中,比例度的大小应视具体情况而定,比例度太小,控制作用太弱,不利于系统克服扰动,余差太大,控制质量差,也没有什么控制作用;比例度太大,控制作用太强,容易导致系统的稳定性变差,引发振荡。
对于反应灵敏、放大能力强的被控对象,为提高系统的稳定性,应当使比例度稍小些;而对于反应迟钝,放大能力又较弱的被控对象,比例度可选大一些,以提高整个系统的灵敏度,也可以相应减小余差。
单纯的比例控制适用于扰动不大,滞后较小,负荷变化小,要求不高,允许有一定余差存在的场合。
工业生产中比例控制规律使用较为普遍。
比例积分(PI)控制比例控制规律是基本控制规律中最基本的、应用最普遍的一种,其最大优点就是控制及时、迅速。
只要有偏差产生,控制器立即产生控制作用。
但是,不能最终消除余差的缺点限制了它的单独使用。
克服余差的办法是在比例控制的基础上加上积分控制作用。
积分控制器的输出与输入偏差对时间的积分成正比。
这里的“积分”指的是“积累”的意思。
积分控制器的输出不仅与输入偏差的大小有关,而且还与偏差存在的时间有关。
只要偏差存在,输出就会不断累积(输出值越来越大或越来越小),一直到偏差为零,累积才会停止。
所以,积分控制可以消除余差。
积分控制规律又称无差控制规律。
积分时间的大小表征了积分控制作用的强弱。
积分时间越小,控制作用越强;反之,控制作用越弱。
积分控制虽然能消除余差,但它存在着控制不及时的缺点。
因为积分输出的累积是渐进的,其产生的控制作用总是落后于偏差的变化,不能及时有效地克服干扰的影响,难以使控制系统稳定下来。
第3章习题(xítí)与思考题3-1 什么(shén me)是控制器的控制规律?控制器有哪些基本控制规律?解答(jiědá):1)控制(kòngzhì)规律:是指控制器的输出(shūchū)信号与输入偏差信号之间的关系。
2)基本控制规律:位式控制、比例控制、比例积分控制、比例微分控制和比例积分微分控制。
3-2 双位控制规律是怎样的?有何优缺点?解答:1)双位控制的输出规律是根据输入偏差的正负,控制器的输出为最大或最小。
2)缺点:在位式控制模式下,被控变量持续地在设定值上下作等幅振荡,无法稳定在设定值上。
这是由于双位控制器只有两个特定的输出值,相应的控制阀也只有两个极限位置,总是过量调节所致。
3)优点:偏差在中间区内时,控制机构不动作,可以降低控制机构开关的频繁程度,延长控制器中运动部件的使用寿命。
3-3 比例控制为什么会产生余差?解答:产生余差的原因:比例控制器的输出信号y与输入偏差e之间成比例关系:为了克服扰动的影响,控制器必须要有控制作用,即其输出要有变化量,而对于比例控制来讲,只有在偏差不为零时,控制器的输出变化量才不为零,这说明比例控制会永远存在余差。
3-4 试写出积分控制规律的数学表达式。
为什么积分控制能消除余差?解答:1)积分控制作用的输出变化量y 是输入偏差e 的积分:2)当有偏差存在(c únz ài)时,输出信号将随时间增大(或减小)。
当偏差为零时,输出停止变化,保持在某一值上。
因而积分控制器组成控制系统可以到达无余差。
3-5 什么是积分(j īf ēn)时间?试述积分时间对控制过程的影响。
解答(ji ěd á):1)⎰=edt T y 11 积分时间是控制器消除偏差的调整时间,只要有偏差存在,输出信号将随时间增大(或减小)。
只有(zh ǐy ǒu)当偏差为零时,输出停止变化,保持在某一值上。
试析智能控制器的基本控制规律随着微电子技术的不断发展,集成了cpu、存储器、定时器/计数器、并行和串行接口、看门狗、前置放大器甚至a/d、d/a转换器等电路在一块芯片上的超大规模集成电路芯片(即单片机)出现了。
以单片机为主体,将计算机技术与测量控制技术结合在一起,又组成了所谓的“智能化测量控制系统”,也就是智能控制器。
智能控制器工作原理。
传感器拾取被测参量的信息并转换成电信号,经滤波去除干扰后送入多路模拟开关;由单片机逐路选通模拟开关将各输入通道的信号逐一送入程控增益放大器,放大后的信号经a/d转换器转换成相应的脉冲信号后送入单片机中;单片机根据仪器所设定的初值进行相应的数据运算和处理(如非线性校正等);运算的结果被转换为相应的数据进行显示和打印;同时单片机把运算结果与存储于片内flashrom(闪速存储器)或e2prom(电可擦除存贮器)内的设定参数进行运算比较后,根据运算结果和控制要求,输出相应的控制信号(如报警装置触发、继电器触点等)。
此外,智能控制器还可以与pc机组成分布式测控系统,由单片机作为下位机采集各种测量信号与数据,通过串行通信将信息传输给上位机,由pc机进行全局管理。
智能控制器基本构成1、硬件部分(1)主机电路主要由微处理器cpu、只读存储器rom和eprom、随机存储器ram、定时/计数器ctc以及输入/输出接口等组成,它是数字控制器的核心,用于数据运算处理和各组成部分的管理。
(2)过程输入通道包括模拟量输入通道和开关量输入通道两部分,其中模拟量输入通道主要由多路模拟开关、采样/保持器和a/d转换器等组成,其作用是将模拟量输入信号转换为相应的数字量;而开关量输入通道则将多个开关输入信号通过输入缓冲器将其转换为能被计算机识别的数字信号。
(3)过程输出通道主要包括模拟量输出通道和开关量输出通道两部分,其中模拟量输出通道由d/a转换器、多路模拟开关输出保持器和v/i转换器等组成,其作用是将数字信号转换为1~5v模拟电压或4~20ma模拟电流信号。

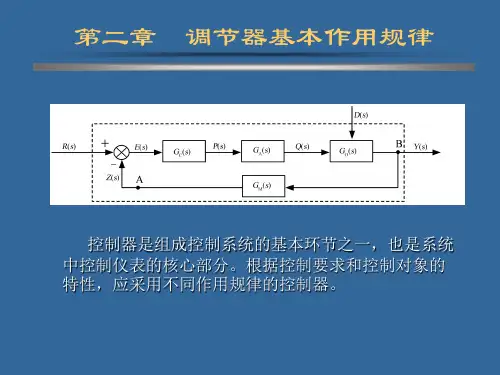
控制器的基本控制规律
控制器的基本控制规律包括比例控制、积分控制和微分控制。
比例控制:控制器输出与误差成正比,适用于控制系统相对稳定的情况,但容易产生超调和稳态误差。
积分控制:控制器输出与误差的积分成正比,适用于长时间存在偏差的情况,能够消除稳态误差,但易产生超调和振荡。
微分控制:控制器输出与误差的微分成正比,适用于快速响应和减小超调的情况,但容易受到噪声的干扰。
在实际应用中,通常将这些控制规律组合成PID控制器,对控制对象进行综合控制。
所谓控制规律是指控制器的输出信号与控制误差之间的关系概述说明1. 引言1.1 概述控制规律是指控制器的输出信号与控制误差之间的关系。
在自动控制系统中,为了实现对被控对象的精确调节和稳定性能,需要设计合适的控制规律来驱动控制器输出,并使其与期望值或参考输入信号相匹配。
1.2 文章结构本文将从引言、控制规律和控制器、常见控制规律及其特点、控制误差的衡量与分析方法以及结论等方面进行阐述。
通过对这些内容的介绍和分析,旨在加深对控制规律概念和原理的理解,提供一些常见的应用案例,并进一步讨论如何评价和改善系统中存在的误差问题。
1.3 目的本文旨在帮助读者全面了解和认识控制规律及其与控制器之间的关系。
同时,通过对常见控制规律和误差分析方法的介绍,读者可以更好地应用这些知识来解决实际工程中遇到的问题,并提高自动化系统的调节性能和稳定性。
以上为文章“1. 引言”部分内容,请根据需要进行修改和完善。
2. 控制规律和控制器2.1 控制规律的定义与作用控制规律是指控制器根据控制误差的大小和变化率来生成输出信号的方式。
它决定了在给定输入条件下,控制器如何调整系统的参数以实现所需的响应。
控制规律起到桥梁作用,将感知到的系统偏差转化为相应的输出信号,并帮助系统迅速、准确地达到预期目标。
2.2 控制器的概念和功能控制器是一个重要的组件,通过根据传感器反馈信息识别和测量系统误差,并计算出相应的调整量。
它可以被视为一个自动调节装置,不断监控和修改系统参数,以保持系统稳定性并满足性能要求。
常见的控制器包括比例(P)控制器、积分(I)控制器和比例-积分(PI)控制器。
比例控制器根据偏差大小直接产生输出信号,适用于简单且线性度较好的系统。
积分控制器对累积偏差进行补偿,可以消除稳态误差,并改善系统响应速度。
比例-积分控制器是比例和积分控制器的结合,综合考虑了稳态误差和响应速度两个方面。
2.3 控制误差与输出信号关系的意义控制误差是指实际输出值与期望输出值之间的差异。