第03章 控制器的动态特性汇总
- 格式:ppt
- 大小:2.08 MB
- 文档页数:59
1、P控制器只改变系统的增益而不影响相位,他对系统的影响主要反映在系统
的稳态误差和稳定性上,增大比例系数可提高系统的开环增益,减小系统的稳态误差,从而提高系统的控制精度,但这会降低系统的相对稳定性,甚至可能造成闭环系统的不稳定。
2、PI控制器消除或减小系统的稳态误差,改善系统的稳态性能
3、PID控制通过积分作用消除误差,而积分控制可缩小超调量,加快反应,是综合了PI控制与PD控制长处并去除其短处的控制,从频域角度看,PID控制通过积分作用于系统的低频段,以提高系统的稳定性,而微分作用于系统的中频段,以改善系统的动态性能。
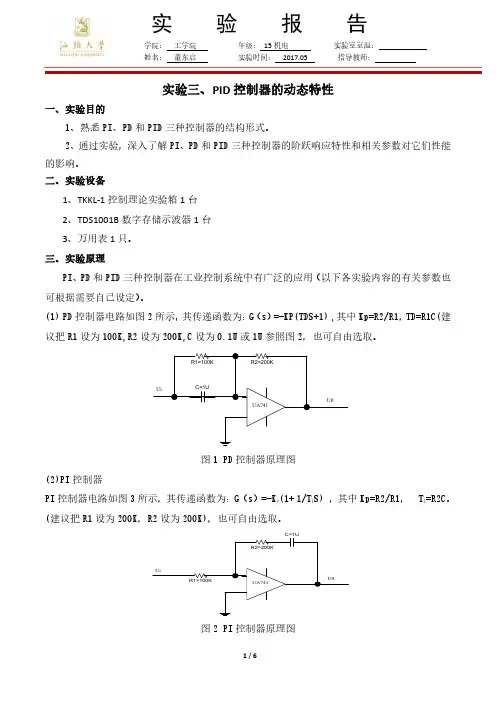
实验三、PID 控制器的动态特性一、实验目的1、熟悉PI 、PD 和PID 三种控制器的结构形式。
2、通过实验,深入了解PI 、PD 和PID 三种控制器的阶跃响应特性和相关参数对它们性能的影响。
二、实验设备1、TKKL-1控制理论实验箱1台2、TDS1001B 数字存储示波器1台3、万用表1只。
三、实验原理PI 、PD 和PID 三种控制器在工业控制系统中有广泛的应用(以下各实验内容的有关参数也可根据需要自己设定)。
(1) PD 控制器电路如图2所示,其传递函数为:G (s )=-KP(TDS+1) ,其中Kp=R2/R1,TD=R1C(建议把R1设为100K,R2设为200K,C 设为0.1U 或1U参照图2,也可自由选取。
图1 PD 控制器原理图(2)PI 控制器PI 控制器电路如图3所示,其传递函数为:G (s )=-K P (1+ 1/T I S) ,其中Kp=R2/R1, T I =R2C 。
(建议把R1设为200K ,R2设为200K),也可自由选取。
图2 PI 控制器原理图(3)PID 控制器如图4所示,其传递函数为:G (s )=-KP(1+ 1/TIS+ TDS) ,其中, , Ti=R1C2,Kp=()/Ti , ,TD=()/()图3 PID 控制器原理图四、实验内容1、按其原理图连线,令Ur=1V ,C=1uF,用示波器分别测试R1=100K 和R2为200K 时(或R1=200K 和R2为200K 时)的PD 控制器的输出波形(PD 控制器的有关参数也可根据实验条件自己选择合适的参数)。
2、令Ur=1V ,C=1uF ,用示波器分别测试R1=100K 和R2=200K 时(或R1=200K 和R2=200K 时)的PI 控制器的输出波形(PI 控制器的有关参数也可根据实验条件自己选择合适的参数)。
3、令Ur=1V ,设计PID 控制器的有关参数,并用示波器测试PID 控制器的输出波形。