虚功原理.ppt
- 格式:ppt
- 大小:750.50 KB
- 文档页数:46

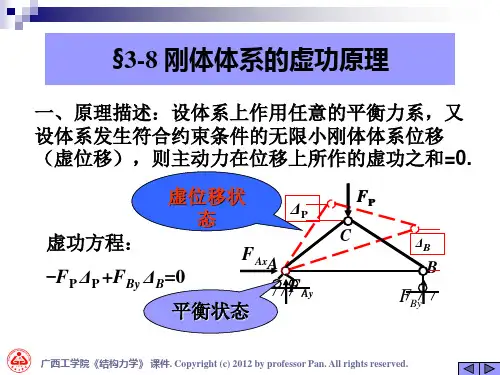
§5、2虚功原理(虚位移原理)一、虚位移和实位移实位移:由于运动而实际发生的位移 dt v r d= 对应时间间隔dt ,同时满足运动微分方程虚位移:t 时刻,质点在约束允许情况下可能发生的无限小位置变更虚位移是可能位移,纯几何概念(非运动学概念),以i rδ表示(1)特点(本质):想象中可能发生的位移,它只取决于质点在t 时刻的位置和约束方程,并不对应一段时间间隔()0=t δ,它是一个抽象的等时变分概念(2)直观意义(求法):对于非稳定约束,在t 时刻将约束“冻结”,然后考察在约束允许情况下的可能位移,即视约束方程中的t 不变()0=t δ,对约束方程进行等时变分运算(同微分运算,注意)0=t δ即可得虚位移;对于稳定约束,由于约束方程中不显含t ,“冻结”已无实际意义,等时变分运算与微分运算完全相同。
Example 质点被限制在以等速u 匀速上升的水平面内运动,约束方程为 0=-ut z 0=z δ udt dz =(3)实位移是唯一的,虚位移可若干个;对稳定约束,实位移为若干个虚位移中的某一个;对非稳定约束,实位移与虚位移不一致。
见273p 图5.2-1二、理想约束实功-作用在质点上的力(含约束力i R )在实位移rd中所作的功 dW虚功-作用在质点上的力(含约束力i R )在任意虚位移rδ中所作的功 W δ其中 i R为第i 个质点受的约束力 若∑=⋅ii i r R 0δ体系所受诸约束反力在任意虚位移中所作元功之和等于零⇒理想约束例如 光滑曲面、曲线约束,刚性杆,不可伸长的绳索等刚性杆约束 022112111='+'-=⋅+⋅r f r f r f r f δδδδ (21f f-= 21f f =; 21r r '='δδ 刚性杆约束所允许) 由于引入了虚位移,巧妙的消取了约束反力(优点 亦是缺点)三、虚功原理(分析力学重要原理之一)(受约束力学体系的力学原理之一)体系受k 个几何约束,在主动力和约束力的共同作用下处于平衡状态,则其中每个质点均处于平衡状态,即 0=+i i R F (2,1=i ……)n 0=⋅+⋅ii i i r R r F δδ⇒对系统求和⇒0=⋅+⋅∑∑i i ii i ir R r Fδδ 对于理想约束∑=⋅ii i r R 0δ 则=W δ0=⋅∑i i ir Fδ∑=++ii iz i iy i ixz F y F x F)(δδδ 虚功原理⇒具有理想约束力学体系,其平衡的充要条件是所有主动力在任意虚位移中所作元功之和等于零 (1717 伯努利)说明:1、由=W δ0=⋅∑i i ir Fδ ,只能求出平衡条件,不能求出约束反力,欲求约束反力i R,需用拉格朗日未定乘数法2、运用虚功原理求平衡条件的方法步骤(1)确定系统自由度,选择合适的广义坐标;(2)将i r表示为广义坐标q的函数,并求出i rδ(i i i z y x δδδ,,);(3)由虚功原理列出平衡方程,并令αδq 的系数为零,求出平衡条件。