6.2 变形体系的虚功原理
- 格式:ppt
- 大小:389.50 KB
- 文档页数:16


变形体系的虚功原理
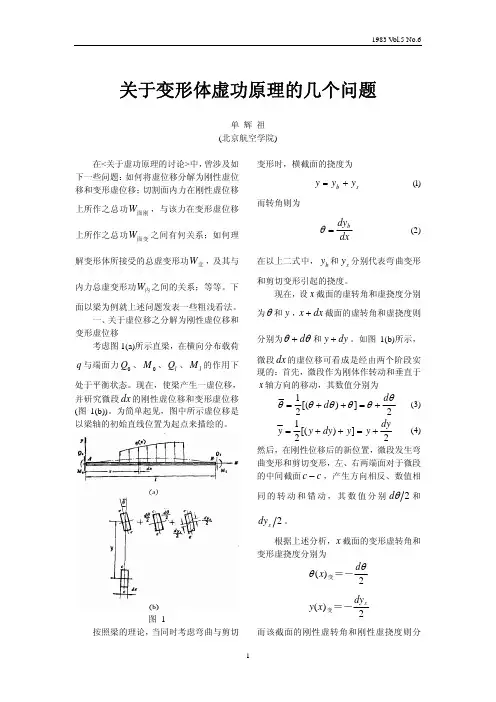
变形体系的虚功原理可表述为:变形体系处于平衡的必要和充分条件是:在满⾜体系变形协调条件和位移边界条件的任意微⼩虚位移过程中,变形体系上所有外⼒所做虚功的总和(W外),等于变形体系中各微段截⾯上的内⼒在其变形上所做虚功的总和(W变),即
W外=W变 (11-3—1)
(11-3—2)
上式也称为变形体系的虚功⽅程。
式中P为作虚功的⼴义⼒,Δ为与P相应的⼴义位移;C是⽀座的线位移或⾓位移,R是与C 相应的作虚功的⽀座反⼒或反⼒矩;M、N、V分别表⽰作虚功的平衡⼒系中微段上的弯矩、轴向⼒、剪⼒;dθ、du、dη分别表⽰虚位移状态中同⼀微段的弯曲变形、轴向变形、平均剪切变形。
对变形体系虚功⽅程(3—2)应注意理解以下⼏点:
(1)刚体系的虚功原理只是变形体系虚功原理的⼀种特殊情况,对刚体系来讲,W变=0,式(3—2)即成为刚体系虚功⽅程。
(2)式(3—2)是⼀个既可作为⼏何⽅程(变形协调⽅程),⼜可作为平衡⽅程的综合性⽅程。
例如当受⼒平衡状态为实际状态,位移状态为虚设状态时,变形体系的虚功原理就称为变形体系的虚位移原理,可利⽤它来求解受⼒平衡状态中的未知⼒,这时的虚功⽅程,实质上代表平衡⽅程;当位移状态为实际状态,受⼒平衡状态为虚设状态时,变形体系的虚功原理就称为变形体系的虚⼒原理,可利⽤它来求解位移状态中的未知位移,此时的虚功⽅程,实质上代表⼏何⽅程。
本章的结构位移计算,就是以变形体系的虚⼒原理作为理论依据的。
(3)变形体系的虚功原理适⽤于弹性、⾮弹性、线性、⾮线性等变形体系的结构分析。
第6章 结构位移计算6.1 复习笔记【知识框架】【重点难点归纳】一、结构位移的基本概念(见表6-1-1) ★★表6-1-1 结构位移的基本概念二、刚体的虚功原理 ★★★平衡方程是一种直接的受力分析方法,而虚功原理是一种间接手法。
虚功原理是(任意平衡力系)在(任意可能位移)上所做的总虚功为零。
根据虚设对象不同,刚体的虚功原理分两种应用形式(虚力原理、虚位移原理),具体见表6-1-2。
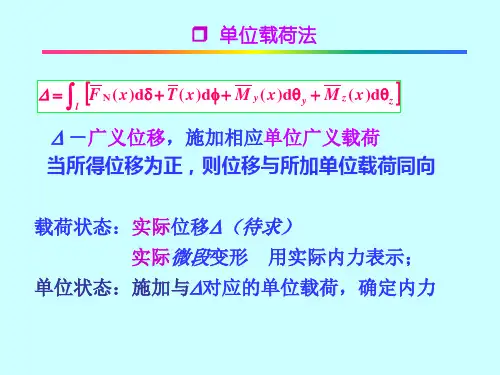
表6-1-2 刚体的虚功原理三、变形体系的虚功原理(见表6-1-3) ★★★表6-1-3 变形体系的虚功原理四、位移计算的一般公式单位荷载法 ★★★★★基于化整为零、积零为整的原则,结构位移的计算从局部变形入手,通过虚力原理中的单位荷载法推导其拉伸、剪切、弯曲变形公式,再对这些局部变形公式进行叠加,得到整体变形公式,最后通过虚功方程推导出位移计算公式,见表6-1-4。
表6-1-4 单位荷载法求变形体系的位移注:为虚设单位荷载在支座处引起的反力;、N、Error!S分别为单位荷载在截面引起的弯矩、轴力、剪力。
拟求位移Δ可以引申理解为广义位移,将结构位移广义化,可以求解两点之间的广义位移。
广义位移、广义单位荷载和外力虚功三者之间满足:W=1·Δ。
单广义位移分类及单位荷载施加方式见表6-1-5。
表6-1-5 单广义位移分类及单位荷载施加方式五、静定结构在荷载作用下的位移计算(见表6-1-6) ★★★★表6-1-6 静定结构在荷载作用下的位移计算注:G为材料的切变模量;A为杆件截面的面积;k为切应力沿截面分布不均匀而引用的改正系数(考试作为已知条件)。
六、图乘法(见表6-1-7) ★★★★★。