求解结构可靠指标的线性可行方向算法
- 格式:pdf
- 大小:235.90 KB
- 文档页数:4

关于可靠度分析的若干方法1.一次二阶矩法 (1)中心点法中心点法的基本思路就是将非线性功能函数在其随机变量均值(中心点)处Taylor 级数展开并取至一阶项,然后近似计算功能函数的平均值和标准差,而结构可靠度可用功能函数的均值和标准差来表示。
假设n x x x ,...,,21为结构中互不相关的n 个基本随机变量,其均值为),...,2,1(n i ix =μ标准差为),...,2,1(n i i x =σ,将功能函数Z=G(n x x x ,...,,21)在均值处Taylor 级数展开并取至一阶项:)(),...,,(121i n x i ni i x x x x x G G Z μμμμμ-⎪⎪⎭⎫⎝⎛∂∂+=∑= 由此可计算出功能函数的均值和标准差为:),...,,(21nx x x Z G μμμμ=∑=⎪⎪⎭⎫ ⎝⎛∂∂=ni x i Z i x G 122σσμ从而结构的可靠度可表示为:∑=⎪⎪⎭⎫ ⎝⎛∂∂==ni x i x x x Z Z inx G G 122),...,,(21σμμμσμβμ由以上论述可知,中心点法的最大的优势在于计算简便,不需要进行过多的数值计算,但其缺陷也是非常明显的:①不考虑随机变量的分布类型;②将非线性功能函数在基本随机变量均值处展开不合理,这是因为均值不一定在结构的极限状态面上,因此展开后的功能函数可能会较大地偏离原来的极限状态面;③对有相同力学含义但数学表达式不同的极限状态方程,求得的结构可靠指标值不同。
(2)验算点法(JC 法)验算点法的特点是能够考虑非正态的随机变量,在计算工作量增加不多的条件下,可对可靠指标β进行精度较高的计算。
对于极限状态方程中包含非正态分布的随机变量的情形,在进行其可靠度分析时,一般要把非正态随机变量当量化为正态随机变量。
当量正态化方法即为JC 法。
它的基本思想就是:①在设计验算点*x 处,当量正态随机变量*X (其均值*IX μ ,标准差为*IX σ)的分布函数值*I X F 与原随机变量(其均值*i x μ ,标准差为*I x σ)的分布函数值*I x F 相等;②在设计验算点*x 处,当量正态随机变量*X (其均值*IX μ ,标准差为*IX σ)的概率密度函数值*IX f 与原随机变量(其均值*ix μ ,标准差为*Ix σ)的概率密度函数值*Ix f 相等。

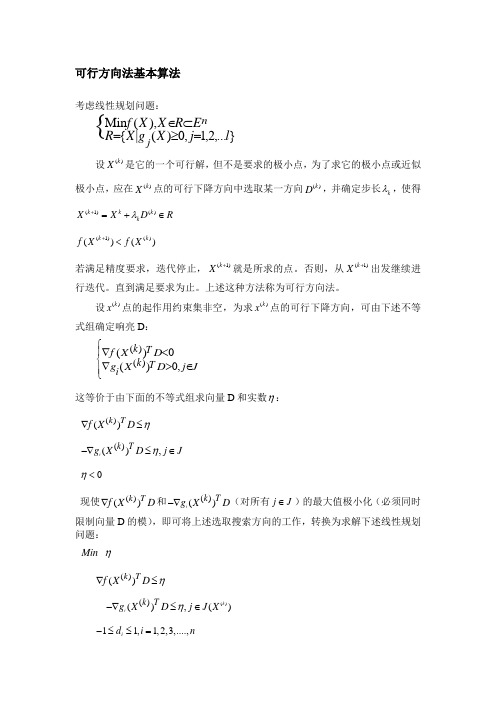
可行方向法基本算法考虑线性规划问题: Min (),{|()0,1,2,...}{n j f X X R E R X g X j l ∈⊂=≥= 设()k X 是它的一个可行解,但不是要求的极小点,为了求它的极小点或近似极小点,应在()k X 点的可行下降方向中选取某一方向()k D ,并确定步长k λ,使得 (1)()k k k k X X D R λ+=+∈(1)()()()k k f X f X +<若满足精度要求,迭代停止,(1)k X +就是所求的点。
否则,从(1)k X +出发继续进行迭代。
直到满足要求为止。
上述这种方法称为可行方向法。
设()k x 点的起作用约束集非空,为求()k x 点的可行下降方向,可由下述不等式组确定响亮D :()()()0()0,k T k T i f X D g X D j J ⎧⎪⎨⎪⎩∇<∇>∈ 这等价于由下面的不等式组求向量D 和实数η:()()k T f X D η∇≤()(),i k T g X D j J η-∇≤∈0η<现使()()k T f X D ∇和()()i k T g X D -∇(对所有j J ∈)的最大值极小化(必须同时限制向量D 的模),即可将上述选取搜索方向的工作,转换为求解下述线性规划问题:Min η()()k T f X D η∇≤()()(),()k i k T g X D j J X η-∇≤∈11,1,2,3,..i d i n -≤≤=式中(1,2,3,...,)i d i n =为向量D 的分量。
在上式中加入最后一个限制条件,位的是使该线性规划有有限最优解;由于我们的目的在于寻找搜索方向D ,只需知道D 的各分量的相对大小即可。
将上述线性规划的最优解记为()(,)k k D η,如果求出的0k η=,说明在()k X 点不存在可行下降方向,在()()k j g X ∇(此处()()k j J X ∈)线性无关的条件下,()k X 为一K-T 点,若解出0k η<,则得到可行下降方向()k D ,这就是我们所要的所搜方向。


可行方向法摘要可行方向法是求解最优化问题的重要方法,在可行方向法求解过程中,一般需要构造一个求解可行下降方向的子问题,而可行方向法的不同取决于所采用的求解可行下降方向的子问题,它具有如下特点:迭代过程中所采用的搜索方向为可行方向,所产生的迭代点列是中在可行域内,目标函数值单调下降,由此可见,很多方法都可以归入可行方向法一类,本文主要介绍Frank-Wolf 方法。
一、问题形式min ().. 0f x Ax b s t x ≥⎧⎨≥⎩ (11.1)其中A 为m n ⨯矩阵,m b R ∈,n x R ∈。
记{},0,n D x Ax b x x R =≥≥∈并设()f x 一阶连续可微。
二、算法基本思想D 是一个凸多面体,任取0x D ∈,将()f x 在0x 处线性展开 000()()()()()T L f x f x f x x x f x ≈+∇-= 用min ().. 0L f x Ax b s t x ≥⎧⎨≥⎩ 或 0min ().. 0T f x xAx b s t x ∇≥⎧⎨≥⎩ (11.2)逼近原问题,这是一个线性规划问题,设0y D ∈是其最优解。
1)若000()()0T f x y x ∇-=,则0x 也是线性规划问题(11.2)的最优解,此时可证0x 为原问题的K-T 点。
2)若000()()0T f x y x ∇-≠,则由0y 是(11.2)的最优解,故必有0000()()T T f x y f x x ∇<∇从而 000()()0T f x y x ∇-<即00y x -为()f x 在0x 处的下降方向,沿此方向作有约束的一维搜索 00001min (())f x y x λλ≤≤+-设最佳步长因子为0λ,令100000000()(1)()x x y x y x D λλλ=+-=+-∈当λ充分小时100000001()min (())(())f x f x y x f x y x λλλ≤≤=+-≤+-00000()()()()()T f x f x y x o f x λλ=+∇-+< 用1x 取代0x ,重复以上计算过程。