完整版24机器人机身及行走机构
- 格式:ppt
- 大小:4.35 MB
- 文档页数:51
机器人行走结构的类型及特点一、移动机器人行走机构概述机器人行走机构按照其运动轨迹可分为固定式轨迹和无固定式轨迹两种。
固定式轨迹主要用于工业机器人,它是对人类手臂动作和功能的模拟和扩展;无固定轨迹就是指具有移动功能的移动机器人,它是对人类行走功能的模拟和扩展。
移动机器人的行走结构形式主要有:车轮式移动结构;履带式移动结构;步行式移动结构。
此外,还有步进式移动结构、蠕动式移动结构、混合式移动结构和蛇行式移动结构等,适合于各种特别的场合。
从移动机器人所处环境看,可以分为结构环境和非结构环境两类。
结构环境:移动环境是在轨道上(一维)和铺好的道路(二维)。
在这种场合,就能利用车轮移动结构。
非结构环境:陆上二维、三维环境;海上、海中环境;空中宇宙环境等原有的自然环境。
陆上建筑物的阶梯、电梯、间隙沟等。
在这样的非结构环境领域,可参考自然界动物的移动机构,也可以利用人们开发履带,驱动器。
例如:2足、4足、6足及多足等步行结构。
行走结构的设计对于移动机器人的工作效率有着至关重要的作用,选择适当、精巧的行走结构往往可以大大提高机器人的动作效率。
这就需要我们熟悉和了解不同机器人行走结构的类型及特点。
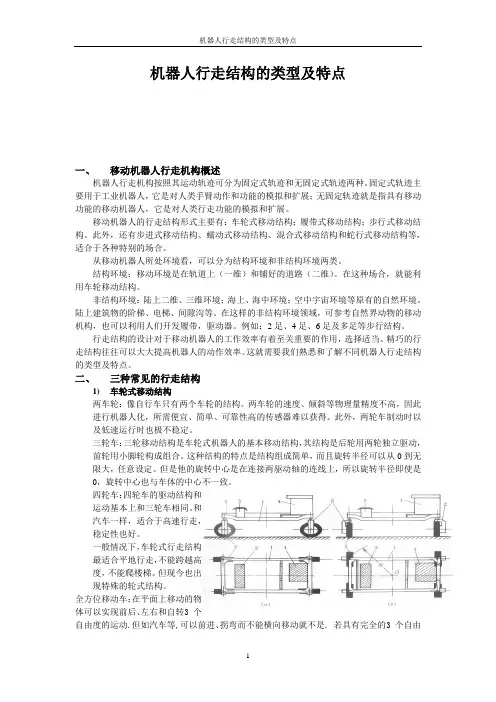
二、三种常见的行走结构1)车轮式移动结构两车轮:像自行车只有两个车轮的结构。
两车轮的速度、倾斜等物理量精度不高,因此进行机器人化,所需便宜、简单、可靠性高的传感器难以获得。
此外,两轮车制动时以及低速运行时也极不稳定。
三轮车:三轮移动结构是车轮式机器人的基本移动结构,其结构是后轮用两轮独立驱动,前轮用小脚轮构成组合。
这种结构的特点是结构组成简单,而且旋转半径可以从0到无限大,任意设定。
但是他的旋转中心是在连接两驱动轴的连线上,所以旋转半径即使是0,旋转中心也与车体的中心不一致。
四轮车:四轮车的驱动结构和运动基本上和三轮车相同。
和汽车一样,适合于高速行走,稳定性也好。
一般情况下,车轮式行走结构最适合平地行走,不能跨越高度,不能爬楼梯。


机器人行走机构原理机器人行走机构是指用于控制机器人移动和行走的结构和装置。
它是实现机器人在不同环境中自由移动和执行任务的关键部件。
机器人行走机构的设计和原理直接影响着机器人的稳定性、速度、灵活性和适应性。
1. 基本概念在探讨机器人行走机构的原理之前,先来了解一些基本概念:•步态(Gait):指机器人在运动过程中,支撑腿与摆动腿之间的相对运动规律。
不同步态适用于不同环境和任务需求。
•支撑腿(Support Leg):指在行走过程中用于支撑和稳定身体的腿。
•摆动腿(Swing Leg):指在行走过程中用于推进身体向前移动的腿。
•步态周期(Gait Cycle):指完成一次完整步态所需要的时间。
•步幅(Stride Length):指每一步前进的距离。
2. 行走方式2.1. 轮式行走轮式行走是最常见且简单的行走方式之一。
它使用轮子作为机器人的运动部件,通过控制轮子的转动来实现机器人的行走。
轮式行走机构可以分为两种类型:差速驱动和全向驱动。
2.1.1. 差速驱动差速驱动是指通过控制左右两侧轮子的转速差异来实现机器人的转弯和定位。
当左右两侧轮子转速相等时,机器人直线行走;当两侧轮子转速不等时,机器人会产生转向力矩,从而实现转弯。
差速驱动的优点是结构简单、成本低廉,适用于平坦且无障碍物的环境。
然而,它在不同地面上的摩擦力变化较大时容易出现滑移现象,并且在越野或不平坦地形上表现较差。
2.1.2. 全向驱动全向驱动是指通过控制多个轮子(通常是三个或四个)以不同方向和速度旋转来实现机器人的任意方向移动。
全向驱动可以通过组合直线运动和旋转运动来实现复杂路径的行走。
全向驱动的优点是机器人具有更好的机动性和灵活性,能够在狭窄空间中进行精确移动和定位。
然而,全向驱动的结构复杂、成本较高,并且对地面摩擦力要求较高。
2.2. 腿式行走腿式行走是模仿生物行走方式的一种机器人行走方式。
它使用类似于生物的腿部结构来实现机器人的行走。



机器人行走结构的类型及特点一、移动机器人行走机构概述机器人行走机构按照其运动轨迹可分为固定式轨迹和无固定式轨迹两种。
固定式轨迹主要用于工业机器人,它是对人类手臂动作和功能的模拟和扩展;无固定轨迹就是指具有移动功能的移动机器人,它是对人类行走功能的模拟和扩展。
移动机器人的行走结构形式主要有:车轮式移动结构;履带式移动结构;步行式移动结构。
此外,还有步进式移动结构、蠕动式移动结构、混合式移动结构和蛇行式移动结构等,适合于各种特别的场合。
从移动机器人所处环境看,可以分为结构环境和非结构环境两类。
结构环境:移动环境是在轨道上(一维)和铺好的道路(二维)。
在这种场合,就能利用车轮移动结构。
非结构环境:陆上二维、三维环境;海上、海中环境;空中宇宙环境等原有的自然环境。
陆上建筑物的阶梯、电梯、间隙沟等。
在这样的非结构环境领域,可参考自然界动物的移动机构,也可以利用人们开发履带,驱动器。
例如:2足、4足、6足及多足等步行结构。
行走结构的设计对于移动机器人的工作效率有着至关重要的作用,选择适当、精巧的行走结构往往可以大大提高机器人的动作效率。
这就需要我们熟悉和了解不同机器人行走结构的类型及特点。
二、三种常见的行走结构1)车轮式移动结构两车轮:像自行车只有两个车轮的结构。
两车轮的速度、倾斜等物理量精度不高,因此进行机器人化,所需便宜、简单、可靠性高的传感器难以获得。
此外,两轮车制动时以及低速运行时也极不稳定。
三轮车:三轮移动结构是车轮式机器人的基本移动结构,其结构是后轮用两轮独立驱动,前轮用小脚轮构成组合。
这种结构的特点是结构组成简单,而且旋转半径可以从0到无限大,任意设定。
但是他的旋转中心是在连接两驱动轴的连线上,所以旋转半径即使是0,旋转中心也与车体的中心不一致。
四轮车:四轮车的驱动结构和运动基本上和三轮车相同。
和汽车一样,适合于高速行走,稳定性也好。
一般情况下,车轮式行走结构最适合平地行走,不能跨越高度,不能爬楼梯。