爬壁机器人分类与行走机构
- 格式:ppt
- 大小:2.10 MB
- 文档页数:13
爬壁机器人的组成结构一、引言爬壁机器人是一种能够在垂直墙面上行走的机器人,它具有很强的适应性和灵活性,被广泛应用于建筑、航空、军事等领域。
本文将介绍爬壁机器人的组成结构,以便读者更好地了解其原理和工作方式。
二、爬壁机器人的主要组成部分1. 机身爬壁机器人的机身是整个系统的核心部分,它包括了所有关键零部件和控制系统。
通常,机身由铝合金或碳纤维材料制成,具有轻量化和高强度的特点。
在机身内部,还配备了电池、电机、传感器等各种设备。
2. 行走模块行走模块是爬壁机器人中最为重要的组成部分之一,它通过运动来实现在墙面上行走。
行走模块通常由几个轮子或履带组成,并且能够自主地调整其形态以适应不同墙面的形状和倾斜角度。
3. 传感器传感器是爬壁机器人中必不可少的组成部分之一,它可以通过感知周围环境来帮助机器人决策。
传感器通常包括激光雷达、红外线传感器、摄像头等,能够精确地测量墙面的倾斜角度和距离。
4. 控制系统控制系统是爬壁机器人中最为关键的组成部分之一,它通过对机身和行走模块的控制来实现在墙面上行走。
控制系统通常由微处理器、电路板等组成,能够自主地调整机身和行走模块的姿态以适应不同墙面的形状和倾斜角度。
三、爬壁机器人的工作原理1. 行走原理爬壁机器人的行走原理是利用吸盘或者磁力来实现在垂直墙面上行走。
吸盘式爬壁机器人通过吸附力将机身固定在墙面上,而磁力式爬壁机器人则是通过电磁铁将自身与墙面产生磁性吸引力。
2. 控制原理爬壁机器人的控制原理是通过传感器不断地获取周围环境信息,并根据这些信息来调整机身和行走模块的姿态,以保证机器人在墙面上行走时的稳定性和安全性。
四、爬壁机器人的应用领域1. 建筑爬壁机器人可以在高楼外墙进行维护和清洁工作,大大提高了工作效率和安全性。
2. 航空爬壁机器人可以在飞机表面进行维护和清洁工作,减少了人力成本和风险。
3. 军事爬壁机器人可以在战场上执行侦察任务,并且能够适应各种地形环境。
五、结论通过本文的介绍,我们了解了爬壁机器人的组成结构、工作原理以及应用领域。
管道攀爬机器人结构设计及行走动力特性分析一、结构设计:1.机器人主体结构:管道攀爬机器人的主体结构一般由多个可伸缩的模块组成,每个模块包括一个电机、行走轮和一个伸缩杆。
2.伸缩机构:机器人通过伸缩杆来适应不同管道尺寸。
伸缩杆一般采用多节设计,每个节段之间通过齿轮或链条进行连接,以实现伸缩功能。
3.行走轮和传动机构:机器人采用行走轮来实现在管道内的行走。
行走轮通常由橡胶材料制成,提供良好的摩擦力。
传动机构一般为电机与行走轮的传动装置,通常采用齿轮传动或链条传动。
4.控制系统:机器人的控制系统包括传感器、执行器和控制器。
传感器可以感知机器人的位置、姿态和环境条件等信息,以便进行自主导航和任务执行。
执行器包括电机和伸缩杆等组件,用于控制机器人的运动和伸缩。
控制器负责接收传感器信息,并根据预设的算法控制机器人的运动。
二、行走动力特性分析:1.爬行速度:管道攀爬机器人的爬行速度取决于行走轮的直径、电机的转速和传动机构的设计等因素。
一般来说,机器人爬行速度应该足够快,以提高任务完成效率。
2.负载能力:机器人承载工具和传感器进行任务执行,因此需要具有较大的负载能力。
负载能力的大小与机器人的结构强度和设计参数有关。
3.自稳定性:机器人在管道内行走时需要具备较好的自稳定性,以应对管道内的复杂环境。
自稳定性主要通过控制系统实现,通过传感器检测机器人的姿态和环境条件,并及时做出调整。
4.能耗与动力供应:管道攀爬机器人通常采用电池供电,因此需要考虑能耗和续航时间。
一般通过优化结构设计和控制算法,减小阻力和能耗,延长电池寿命。
5.适应性:管道攀爬机器人需要适应多种管道的尺寸和形状。
因此,其结构设计应具有一定的自适应性,能够根据管道的不同尺寸进行伸缩和调整。
综上所述,管道攀爬机器人的结构设计和行走动力特性是保证机器人能够在管道内进行任务执行的关键要素。
通过合理的结构设计和动力调节,可以使机器人具有较高的工作效率和可靠性,适应不同尺寸和形状的管道。
爬壁机器人的行业报告随着移动机器人的迅速发展,壁面爬行机器人得到了各界的高度重视,并在军事、工业以及民用等领域得到了广泛的应用。
(1)建筑外墙面清洗机器人现阶段高层建筑外墙面的清洁多采用人工高空清洗的方式,工人搭乘吊篮、升降平台或者用安全绳的方式进行清洗,这些方式存在工作效率低,尤其是对工人安全存在很大的隐患。
而建筑外墙清洗机器人可以替代工人完成外墙清洗工作,其可以分为粗糙表面的外墙清洗机器人和玻璃表面外墙清洗机器人。
(2)造船业应用的机器人我国的船舶制造业在制造领域占有重要的地位,随着海洋运输、深海探测等迅速发展,对船舶制造技术提出了更高的要求,船舶的制造过程主要的加工工序有焊接、除锈、喷涂等操作,由于这些制造过程环境极其恶劣,比如在焊接过程中,工人需要在密闭的空间中承受近60 ℃的高温,近年来国内外积极推动将爬壁机器人应用于船舶制造过程的焊接、涂装、除锈的制造领域。
(3)管道爬壁机器人管道在工业生产中发挥着很重要的作用,比如石油管道、天然气管道、化工行业应用的各种管道、建筑物内的通风管道、城市管网、工业大型锅炉的热交换管道等等。
应用于管道的爬壁机器人通常有管内爬壁机器人和管外爬壁机器人,机器人通常完成的工作任务有焊接、检测。
(4)罐体爬壁机器人在工业生产中,罐体在石化、冶金等领域有广泛的应用,如液化石油气、天然气储罐,是由若干经过预先弯曲成球面的钢板通过焊接而成,存储过程中罐体受到较大的工作压力,一旦金属罐体产生泄露将造成重大的安全生产责任事故,因此对这些压力容器的外壁,严格规定了清理周期为1 年,且其罐内壁检测检验的周期不超过6 年,这些行业对于爬壁机器人的需求也极为迫切。
1 爬壁机器人的吸附方式通常情况下,爬壁机器人需要在陡峭或者垂直的壁面上行走,甚至在大于90°的壁面或者天花板上面行走。
因此爬壁机器人首先需要解决的问题是克服重力的作用,实现机器人的攀爬动作。
而爬壁机器人的攀爬多采用吸附的方式。
爬壁机器人的组成结构一、爬壁机器人的概述爬壁机器人(Climbing Robot)是一种能够在垂直墙面或倾斜表面上爬行的机器人。
它利用各种机械结构和传动系统,实现由地面到垂直墙面的过渡,并能在墙面上自由移动。
爬壁机器人具有重要的应用价值,可以用于建筑物外墙的清洁、检测以及施工等任务。
二、爬壁机器人的主要组成部分爬壁机器人的组成结构可以大致分为以下几个部分:1. 机械结构爬壁机器人的机械结构是实现其爬行功能的重要部分。
机械结构通常包括车身、爬行模块、传动系统等组成部分。
其中,车身是机器人的主体部分,承载其他的组件和模块。
爬行模块是负责机器人在墙面上爬行的关键部分,它通常由爬行轮、爬壁脚和贴附装置组成。
传动系统是将电动机或液压装置的能量传递给爬行轮,使机器人能够在墙面上前进。
2. 传感器系统传感器系统是爬壁机器人必备的部分,它能够感知机器人所处的环境和墙面的状态,为机器人提供必要的信息和反馈。
传感器系统通常包括视觉传感器、触觉传感器、力传感器等组件。
视觉传感器可以通过摄像头或激光雷达等设备获取墙面的图像和距离信息,以辅助机器人的导航和定位。
触觉传感器和力传感器可以检测机器人与墙面的接触力和压力,以确保机器人的贴附效果和安全性。
3. 控制系统控制系统是爬壁机器人的”大脑”,负责对机器人进行控制、导航和路径规划等操作。
控制系统通常由嵌入式计算机、传感器接口、动力系统等组成。
嵌入式计算机能够接收传感器的数据,并根据预设的算法和程序对机器人进行实时控制。
传感器接口则用于与传感器进行数据交互,动力系统则负责为机器人提供能量。
4. 电源系统电源系统是为爬壁机器人提供能量的部分,它通常包括电池、电源管理模块和充电系统等组件。
电池是机器人的动力源,可以为机器人提供持续的电能供应。
电源管理模块可以对电池进行电能的管理和分配,以确保机器人的稳定运行。
充电系统则是为电池提供充电服务,以维持机器人长时间的工作能力。
三、爬壁机器人的实现原理爬壁机器人的实现原理可以概括为以下几个步骤:1. 贴附墙面爬壁机器人利用贴附装置将自身稳固地贴附到墙面上。
爬壁机器人原理
爬壁机器人是一种能够在垂直表面上移动的机器人,它通常被设计用于执行检查、维护、清洁等任务,特别是在需要攀爬高楼大厦或其他垂直结构的环境中。
以下是一般爬壁机器人的原理和设计考虑因素:
吸附力或附着力:爬壁机器人通常使用吸盘、气动吸附、磁性或其他附着技术来在垂直表面上产生足够的附着力。
这确保了机器人能够紧密粘附在墙面上,防止它在运动中脱落。
传动系统:为了在垂直表面上移动,爬壁机器人必须具备适当的传动系统。
常见的传动系统包括轮子、履带、腿部或其他可移动的机构。
这些系统需要具备足够的灵活性和稳定性,以适应不同表面的特性。
感知和导航系统:为了在爬行过程中避免障碍物或调整移动路径,爬壁机器人通常配备了各种感知和导航系统。
这可能包括摄像头、激光传感器、超声波传感器等,以帮助机器人感知周围环境并作出相应的决策。
电源和能源:爬壁机器人需要稳定的电源来驱动其各个部件,以及足够的能源供应,以确保在执行任务时具备足够的工作时间。
一些设计中可能包括可充电电池或连接到外部电源的能源系统。
结构和材料:由于爬壁机器人需要在垂直表面上移动,其结构和材料必须具备足够的强度、轻量性和耐久性。
这可能涉及使用高强度的合金材料或先进的复合材料。
安全性考虑:在设计爬壁机器人时,必须考虑到安全性,特别是在高度或危险环境中的应用。
防止机器人脱离表面、防止外部物体受到机器人运动的影响,以及制定应对机器人故障的安全措施都是重要的考虑因素。
这些原理和设计考虑因素使得爬壁机器人能够在垂直表面上安全、高效地执行各种任务。
爬墙机器人结构设计1爬墙机器人分类1.1 用于检测和维修领域爬墙机器人需满足的要求1)速度和机动性:对爬墙机器人来说速度和机动性是它最重要的两个参数。
由于垂直结构的尺寸要求,即使在竖直方向或者天花板上,在检测区域和一些相似点之间也需要实现快速移动。
其他的要求与系统的操控和定位能力有关,这包括移动轨迹的精确性,因为一些用于检测的传感器要求在表面进行光滑且连续的运动。
也有可能要求机器人横向运动或者旋转360°来满足位置传感器和一些工具的要求。
最后一点,机器人必须解决台阶和突起等越障问题,以此来保证其可以到达建筑物的任何一个角落。
2)负载能力:机器人必须具有携带不同重量的负载的能力。
对于一个表面的检测,携带至少10kg的检测装置负载是必须的,因此,机器人的尺寸、吸附和运动装置都应该满足应用的要求。
3)可靠性和安全性:鲁棒性是机器人一个非常重要的非功能性的性质。
如果爬墙机器人在它的一次任务中失败了,它就不能在实践中投入使用。
可靠性和安全性要求包括:硬件鲁棒性、最优控制、检测方法、处理危险情况以及自我恢复等。
系统本身要保证吸附的足够安全,因为就算是可控的跌落也是很危险的。
4)易用性:作为一个检测装置,爬墙机器人需要比一般的装置更强大、更有效率、更安全。
这当然也包括机动性和处理问题的多样性。
因此,根据任务要求,它必须能携带各种不同的负载,容易损耗的零件能够快速被替换,与现有的技术相比它的操作必须快且简单,此外,能耗、重量及机器人的尺寸也是很重要的。
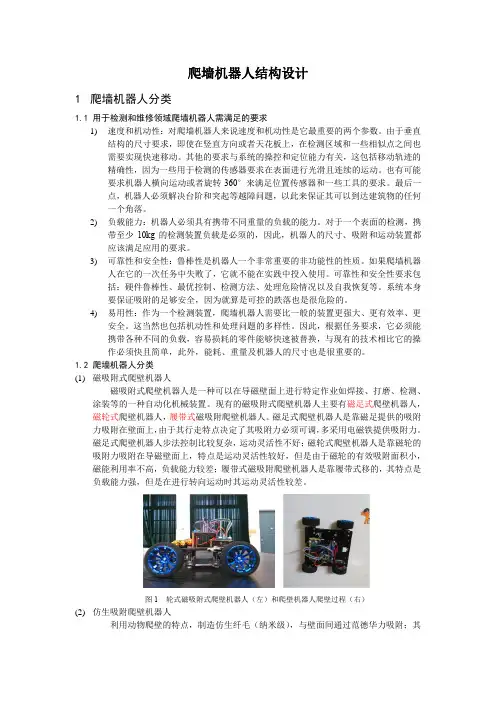
1.2 爬墙机器人分类(1)磁吸附式爬壁机器人磁吸附式爬壁机器人是一种可以在导磁壁面上进行特定作业如焊接、打磨、检测、涂装等的一种自动化机械装置。
现有的磁吸附式爬壁机器人主要有磁足式爬壁机器人,磁轮式爬壁机器人,履带式磁吸附爬壁机器人。
磁足式爬壁机器人是靠磁足提供的吸附力吸附在壁面上,由于其行走特点决定了其吸附力必须可调,多采用电磁铁提供吸附力。
磁足式爬壁机器人步法控制比较复杂,运动灵活性不好;磁轮式爬壁机器人是靠磁轮的吸附力吸附在导磁壁面上,特点是运动灵活性较好,但是由于磁轮的有效吸附面积小,磁能利用率不高,负载能力较差;履带式磁吸附爬壁机器人是靠履带式移的,其特点是负载能力强,但是在进行转向运动时其运动灵活性较差。
1 传统爬壁机器人的结构、吸附方式、移动方式及其特点爬壁机器人必须具有两个基本功能:在壁面上的吸附功能和移动功能。
传统爬壁机器人按吸附功能可分为真空吸附和磁吸附两种形式:真空吸附法又分为单吸盘和多吸盘两种结构形式,具有不受壁面材料限制的优点,但当壁面凸凹不平时,容易使吸盘漏气,从而使吸附力下降,承载能力降低;磁吸附法可分为电磁体和永磁体两种,电磁体式维持吸附力需要电力,但控制较方便。
永磁体式不受断电的影响,使用中安全可靠,但控制较为麻烦。
磁吸附方式对壁面的凸凹适应性强,且吸附力远大于真空吸附方式,不存在真空漏气的问题,但要求壁面必须是导磁材料,因此严重地限制了爬壁机器人的应用环境。
爬壁机器人按移动功能分主要是吸盘式、车轮式和履带式。
吸盘式能跨越很小的障碍,但移动速度慢;车轮式移动速度快、控制灵活,但维持一定的吸附力较困难;履带式对壁面适应性强,着地面积大,但不易转弯。
而这三种移动方式的跨越障碍能力都很弱。
2 国内外壁面爬行机器人的发展概况自1966年日本的西亮教授研制出第一个爬壁机器人以来,爬壁机器人在日本得到蓬勃发展。
之后, 英国、西班牙、美国、德国和俄罗斯等国也相继研制出多种爬壁机器人样机。
20 世纪80年代以来, 国内许多院校和科研单位也在爬壁机器人领域取得了长足的发展, 研制了多种型号的爬壁机器人。
2.1 国外爬壁机器人发展概况爬壁机器人是一种能够在壁面爬行作业的极限作业机器人,它是集机构学、传感技术、控制和信息技术等为一体的高技术产品,世界机器人大国日本在极限作业机器人研究方面尤为积极。
在过去的几十年里,爬壁机器人技术在世界范围内得到迅速发展,也相继研制出了不同种类的样机,有些已经投入实用。
在这一领域,日本取得的成绩突出,美国、英国、法国、意大利、西班牙、澳大利亚、韩国等国也在不断深入研究。
早在1966年,在日本大阪府立大学工学部任讲师的西亮,就利用电风扇进气侧低压空气产生的负压作为吸附力制作了一台垂直壁面移动机器人的原理样机,这被看作是爬壁机器人研究的开端。
敲打式空心检测墙壁攀爬机器人的结构研究随着科技的不断发展,机器人技术开始被应用于各个领域。
墙壁攀爬机器人是一种具有很高研究价值和应用前景的机器人。
本文旨在研究墙壁攀爬机器人的结构,重点针对敲打式空心检测墙壁攀爬机器人的结构进行分析和研究,以期为实际应用提供参考。
敲打式空心检测墙壁攀爬机器人的结构主要由以下几个部分组成:主体结构、移动机构、敲打机构和检测机构。
主体结构是墙壁攀爬机器人的基础,它是机器人其他部件的支撑和连接基础。
主体结构应该具有足够的强度和刚度,以承受机器人在攀爬过程中产生的各种力和扭矩。
主体结构通常采用轻量化的材料,如碳纤维复合材料,以提高机器人的运动效率和工作负荷能力。
移动机构是墙壁攀爬机器人的关键部分,它负责机器人在墙壁上进行移动。
常见的墙壁攀爬机器人移动机构有爪子式和吸盘式两种。
爪子式移动机构通过机械爪子抓住墙壁的凹凸部分,从而实现机器人的移动。
吸盘式移动机构通过真空吸盘固定在墙壁上,然后通过控制真空泵来实现机器人的运动。
根据实际情况选择合适的移动机构,以满足不同环境下的需求。
敲打机构是墙壁攀爬机器人的另一个重要部分,它负责在机器人攀爬过程中敲打墙壁以检测墙壁的结构。
敲打机构通常由电机、减速器和敲击装置组成,通过控制电机和减速器将敲击力量传递给敲击装置,从而实现对墙壁的敲打。
敲击机构的设计需要考虑到敲击力的大小和频率,以确保墙壁的检测效果和机器人的稳定性。
检测机构是墙壁攀爬机器人的核心部分,它负责对墙壁进行检测。
检测机构通常由传感器和数据处理单元组成,通过传感器对墙壁进行数据采集,然后将采集到的数据传递给数据处理单元进行分析和处理。
常见的检测机构有声纳传感器、激光雷达和红外线传感器等,通过收集墙壁的声音、反射信号和热能等信息来获取墙壁的结构和材料等参数。
敲打式空心检测墙壁攀爬机器人的结构是一个复杂的系统工程,需要考虑到机器人的主体结构、移动机构、敲打机构和检测机构等多个方面因素。
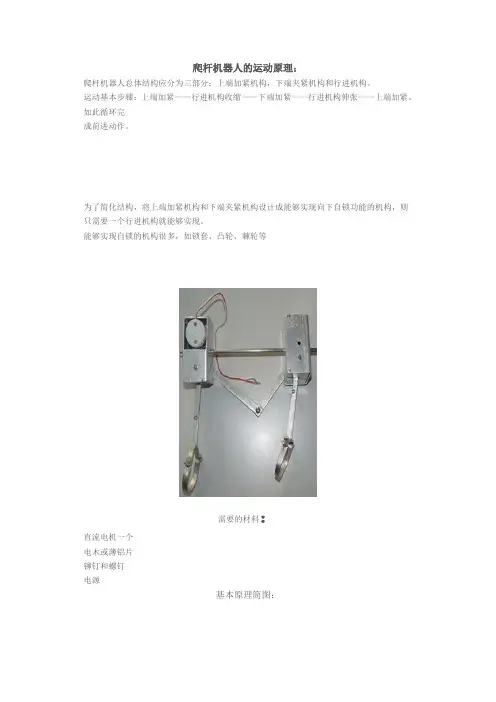
爬杆机器人的运动原理:
爬杆机器人总体结构应分为三部分:上端加紧机构,下端夹紧机构和行进机构。
运动基本步骤:上端加紧——行进机构收缩——下端加紧——行进机构伸张——上端加紧。
如此循环完
成前进动作。
为了简化结构,将上端加紧机构和下端夹紧机构设计成能够实现向下自锁功能的机构,则只需要一个行进机构就能够实现。
能够实现自锁的机构很多,如锁套、凸轮、棘轮等
需要的材料:
直流电机一个
电木或薄铝片
铆钉和螺钉
电源
基本原理简图:
总体方案简图
自锁机构创新点:
将爬杆机器人进行结构上的剖析简化,用最简单的机构实现了同样的功能。
这只是一个简化了的模型,可以此为平台再进行改进和复杂化,从而实现所需要的功能。
制作难点:
模型虽然简单,但需要考虑一些额外的问题,如:
1、行进机构是偏转型的,运动时不稳定,容易左右偏转,需要考虑一个辅助机构防止偏转。
可以考虑将机构改成对称的。
2、电机与连接杆之间如何连接固定。
3、自锁机构的可靠性。
研究报告一、立项背景近几年来,机器人在各个领域中得到广泛的应用和发展。
其中,爬壁机器人(Wall Climbing Robot,WCR)是能够在垂直陡壁上进行作业的机器人,它作为高空极限作业的一种自动机械装置,越来越受到人们的重视。
概括起来,爬壁机器人主要用于:(1)核工业:对核废液储罐进行视觉检查、测厚及焊缝探伤等;(2)石化企业:对立式金属罐或球形罐的内外壁面进行检查或喷砂除锈、喷漆防腐、测量和保养;(3)建筑行业:用于对巨型壁面的喷涂,玻璃壁面的清洗,磁砖安装,桥梁探伤等;(4)消防部门:用于传递救援物资,进行救援工作;(5)造船业:用于喷涂船体的内外壁等。
国内外现有爬壁机器人的壁面吸附方式主要包括:负压吸附、真空吸附、磁吸附、气体推力吸附、粘性吸附和仿生学吸附等。
负压和真空吸附方式具有不受壁面材料限制、适用范围广等特点。
但当壁面凹凸不平时,吸盘容易发生气体过量泄漏,导致吸附力不足,减低爬壁机器人的承载能力,甚至使爬壁机器人从壁面跌落。
磁吸附有永磁和电磁两种方式,但要求壁面必须是导磁材料,主要特点是吸附机构较简单,产生的吸附力远大于负压和真空吸附,也不存在漏气现象,对凹凸不平壁面的适应性较强。
气体推力吸附是利用与壁面成一定角度的气体推力使爬壁机器人贴紧壁面,结构简单,但效率低,受环境影响大,而且控制不易。
粘性吸附和仿生学吸附(仿壁虎)虽然他们的灵活性强,体积小,但是他们的吸附性差有待提高,所以注定载重量小。
爬壁机器人的运动机构主要有足式、框架式、履带式及轮式等。
足式和框架式动作灵活,具备一定越障能力,但移动速度较慢,机构设计和运动步态规划比较复杂;履带式爬壁机器人的壁面吸附力较大,移动速度较快,但调整姿态比较困难;轮式运动机构的主要特点是机构简单、移动速度快、控制灵活方便,但由于一般采用带滑动式吸盘(Sliding Suction Cup,SSC)作为吸附装置,受壁面环境影响较大且对滑动式吸盘的滑动密封性能要求比较高。
机器人行走结构的类型及特点一、移动机器人行走机构概述机器人行走机构按照其运动轨迹可分为固定式轨迹和无固定式轨迹两种。
固定式轨迹主要用于工业机器人,它是对人类手臂动作和功能的模拟和扩展;无固定轨迹就是指具有移动功能的移动机器人,它是对人类行走功能的模拟和扩展。
移动机器人的行走结构形式主要有:车轮式移动结构;履带式移动结构;步行式移动结构。
此外,还有步进式移动结构、蠕动式移动结构、混合式移动结构和蛇行式移动结构等,适合于各种特别的场合。
从移动机器人所处环境看,可以分为结构环境和非结构环境两类。
结构环境:移动环境是在轨道上(一维)和铺好的道路(二维)。
在这种场合,就能利用车轮移动结构。
非结构环境:陆上二维、三维环境;海上、海中环境;空中宇宙环境等原有的自然环境。
陆上建筑物的阶梯、电梯、间隙沟等。
在这样的非结构环境领域,可参考自然界动物的移动机构,也可以利用人们开发履带,驱动器。
例如:2足、4足、6足及多足等步行结构。
行走结构的设计对于移动机器人的工作效率有着至关重要的作用,选择适当、精巧的行走结构往往可以大大提高机器人的动作效率。
这就需要我们熟悉和了解不同机器人行走结构的类型及特点。
二、三种常见的行走结构1)车轮式移动结构两车轮:像自行车只有两个车轮的结构。
两车轮的速度、倾斜等物理量精度不高,因此进行机器人化,所需便宜、简单、可靠性高的传感器难以获得。
此外,两轮车制动时以及低速运行时也极不稳定。
三轮车:三轮移动结构是车轮式机器人的基本移动结构,其结构是后轮用两轮独立驱动,前轮用小脚轮构成组合。
这种结构的特点是结构组成简单,而且旋转半径可以从0到无限大,任意设定。
但是他的旋转中心是在连接两驱动轴的连线上,所以旋转半径即使是0,旋转中心也与车体的中心不一致。
四轮车:四轮车的驱动结构和运动基本上和三轮车相同。
和汽车一样,适合于高速行走,稳定性也好。
一般情况下,车轮式行走结构最适合平地行走,不能跨越高度,不能爬楼梯。
摘要摘要近年来,随着社会的发展,楼层越来越高,使用玻璃幕墙的楼房也越来越多,避免清洗时一个很重要的问题,传统的方式多数为人工,或者是采用电缆从楼顶将机器人吊下,工作效率偏低,危险性高,于是清洗用爬壁机器人应运而生,本文的任务就是设计一种能够在壁面上吸附行走的清洗爬壁机器人。
本文在简单介绍爬壁机器人的国内外研究现状的基础上,基于三维软件PROE 对四轮式真空吸附爬壁机器人的本体机构进行了设计,对一些关键部分进行了设计计算及校核计算,重点是爬壁机器人的移动结构、吸附结构和驱动系统的设计计算。
本文设计的爬壁机器人采用四轮式小车形状结构,结构简单;采用真空吸盘吸附方式,设计一个月牙形的真空舱,利用机械结构完成机器人真空吸盘的吸附与排气控制,避免在每个真空吸盘配备传感器的需要,降低了控制难度;采用后轮驱动,一个电机驱动两个后轮,后轮带动前轮完成机器人的行走,使用蜗轮蜗杆传动装置作为减速器;采用地面供电,地面提供负压的方式;机器人可以在水平面或者垂直表面直线行走。
关键词:真空吸附蜗轮蜗杆机构电机驱动四轮式小车ii AbstractAbstractIn recent years, with the development of society, more and more floors, with glass curtain wall building more and more to avoid cleaning a very important issue, most of the traditional way of artificial, or a cable from the top of the building will be used under the robotic crane, low efficiency, high-risk, then cleaned with a wall-climbing robot came into being, this task is to design a walk on the adsorption to the wall climbing robot for cleaning.This paper briefly wall-climbing robot based on the research status, based on three-dimensional software, PROE, four-wheel vacuum on wall-climbing robot body bodies were designed, carried out on some key satisfied with the design calculation and checking terms, focusing on the mobile climbing robot structure, adsorption structure and drive system design and calculation.This designed wall-climbing robot car with four-wheel-type shape of the structure, simple structure; by vacuum suction adsorption, design of a crescent-shaped vacuum chamber, the completion of the mechanical structure of robot vacuum suction of the adsorption and emission control, to avoid each a vacuum suction cups equipped with sensors need to reduce the difficulty of control; with rear-wheel drive, a motor drive two rear wheels, rear wheel drive front wheel complete the robot walk, use a worm gear reducer; use of ground power the ground to provide negative pressure means; robot can walk straight horizontal or vertical surface.Keywords:目录i目录第一章绪论 (4)1.1 本课题的研究背景 (4)1.2 国内外爬壁机器人的研究现状 (5)1.3 国内外爬壁机器人的发展趋势 (6)1.4壁面自动清洗机器人的研究现状与发展方向 (7)1.5设计内容 (8)第二章软件介绍 (9)第三章爬壁机器人的设计方案 (13)3.1爬壁机器人的工作过程 (13)3.2爬壁机器人的基本功能 (13)3.3爬壁机器人的设计 (14)3.3.1爬壁机器人的总体结构 (15)3.3.2移动装置和吸附装置的设计 (15)3.3.3减速装置及传动装置的设计 (19)3.3.4联轴器和轴承选择 (24)3.3.5爬壁机器人机体建模 (24)3.4爬壁机器人PROE运动仿真 (25)第四章结论 (27)参考文献...........................................错误!未定义书签。