机器人机身及行走机构
- 格式:ppt
- 大小:5.36 MB
- 文档页数:40
第三章机器人的机械结构系统3.1概述;3.2机器人机身及臂部结构【内容提要】本课主要学习工业机器人机身及臂部结构。
介绍了机器人的基本结构及特点;机器人的升降回转型、俯仰型、直移型、类人机器人型机身机构;机器人的臂部机构组成、配置及典型机构。
知识要点:✓机械结构系统✓机身结构✓臂部组成✓机身和臂部配置✓臂部结构重点:✓掌握机器人机械结构系统组成✓掌握机器人常用机身结构类型✓掌握机器人的机身和臂部配置形式✓掌握机器人的臂部结构难点:✓机器人的机身结构类型✓机器人的臂部结构关键字:✓机械结构系统、机身、臂部【本课内容相关资料】3.1概述机器人的机械结构系统指机器人机械结构和机械传动系统,也是机器人的支承基础和执行机构。
本章以工业机器人为主要对象介绍机器人机械结构系统的主要组成、特点、结构形式。
传统的工业机器人一般是由机座、腰部(或肩部)、大臂、小臂、腕部和手部以串联方式联接而成的开式链机器人机构,也称为串联式机器人,也就是通常所说的关节型机器人。
其特点是:工作空间大、手腕关节灵活、各关节驱动解耦性好。
并联式机器人是由单开链或复合开式链用并联形式联接于动、静二个平台之间的一类并联机构所组成。
其特点是:刚性好,结构稳定;承载能力大;误差小精度高;电机可置于固定平台。
本章主要讲解关节型机器人(简称机器人)。
串联型机器人与并联型机器人举例如图3-1、图3-2所示。
动平台伸缩杆球面副固定平台图3-1串联型机器人图3-2并联型机器人机器人机械结构系统是机器人的重要部分,所有的计算、分析和编程最终要通过机械结构系统的运动和动作完成特定的任务。
机器人机械结构系统各部分的基本结构、材料的选择将直接影响整体性能。
3.1.1 机械结构系统的基本结构形式机器人机械结构系统主要由手部(末端执行器)、腕部、臂部、机身、行走机构和驱动与传动部件组成。
机器人必须有一个便于安装的基础件机座。
机座往往与机身做成一体,机身与臂部相连,机身支承臂部,臂部又支承腕部和手部。
机器人行走机构分类一、简介机器人行走机构是指用于实现机器人行走功能的机械结构。
机器人的行走机构种类繁多,根据不同的应用需求和环境条件,可以选择合适的行走机构来满足机器人的运动要求。
本文将对常见的机器人行走机构进行分类介绍。
二、轮式行走机构轮式行走机构是最常见的机器人行走机构之一,其特点是结构简单、易于控制和稳定性较高。
轮式行走机构通常由两个或多个轮子组成,通过电机驱动轮子旋转,从而实现机器人的行走。
轮式行走机构适用于平坦的地面,并且能够快速移动。
三、履带式行走机构履带式行走机构采用履带来实现机器人的行走,其特点是具有较好的通过性和抓地力。
履带式行走机构通常由一条或多条履带组成,通过电机驱动履带的运动,从而实现机器人的行走。
履带式行走机构适用于复杂的地形和恶劣的环境条件,能够克服一些障碍物。
四、足式行走机构足式行走机构模仿了生物的步态,通过仿生设计实现机器人的行走。
足式行走机构通常由多个关节和连接件组成,通过电机驱动关节的运动,从而实现机器人的行走。
足式行走机构具有较好的灵活性和适应性,能够适应不同的地形和环境条件。
五、腿式行走机构腿式行走机构是一种特殊的行走机构,其特点是具有较好的稳定性和适应性。
腿式行走机构通常由多个腿部组成,通过电机驱动腿部的运动,从而实现机器人的行走。
腿式行走机构适用于复杂的地形和狭窄的空间,能够克服一些障碍物。
六、轮腿混合式行走机构轮腿混合式行走机构是将轮式行走机构和腿式行走机构结合起来的一种行走机构。
轮腿混合式行走机构通常由轮子和腿部组成,通过电机驱动轮子和腿部的运动,从而实现机器人的行走。
轮腿混合式行走机构综合了轮式行走机构和腿式行走机构的优点,能够在不同的地形和环境条件下灵活行走。
七、其他行走机构除了上述介绍的常见行走机构外,还有一些其他特殊的行走机构,如链式行走机构、球形行走机构等。
这些行走机构通常被应用于特定的领域和特殊的环境条件,具有一些特殊的优势。
八、总结机器人行走机构是机器人的重要组成部分,不同的行走机构适用于不同的应用场景。
移动机器人的机构与分类分析一、移动机器人的机构一般而言,移动机器人的移动机构主要有轮式移动机构、履带式移动机构及足式移动机构,此外还有步进式移动机构、蠕动式移动机构、蛇行式移动机构和混合式移动机构,以适应不同的工作环境和场合。
一般室内移动机器人通常采用轮式移动机构,室外移动机器人为了适应野外环境的需要,多采用履带式移动机构。
一些仿生机器人,通常模仿某种生物运动方式而采用相应的移动机构,如机器蛇采用蛇行式移动机构,机器鱼则采用尾鳍推进式移动机构。
其中轮式的效率最高,但适应性能力相对较差;而足式的移动适应能力最强,但其效率最低。
1 轮式移动机构轮式移动机器人是移动机器人中应用最多的一种机器人,在相对平坦的地面上,用轮式移动方式是相当优越的。
轮式移动机构根据车轮的多少有1轮、2轮、3轮、4轮及多轮机构。
1轮及2轮移动机构在实现上的障碍主要是稳定性问题,实际应用的轮式移动机构多采用3轮和4轮。
3轮移动机构一般是一个前轮,两个后轮。
其中,两个后轮独立动,前轮是万向轮,只起支撑作用,靠后轮的转速差实现转向。
4轮移动机构应用最为广泛,4轮机构可采用不同的方式实现驱动和转向,既可以使用后轮分散驱动,也可以用连杆机构实现4轮同步转向,这种方式比起仅有前轮转向的车辆可实现更小的转弯半径。
2 足式移动机构履带式移动机构虽在高低不平的地面上可以运动,但是它的适应性不够好,行走时晃动较大,在软地面上行驶时效率低。
根据调查,地球上近一半的地面不适合传统的轮式或履带式车辆行走,但是一般的多足动物却能在这些地方行动自如,显然,足式移动机构在这样的环境下有独特的优势。
足式移动机构对崎岖路面具有很好的适应能力,足式运动方式的立足点是离散的点,可以在可能到达的地面上选择最优的支撑点,而轮式和履带式移动机构必须面临最坏地形上的。
机器人行走结构的类型及特点一、移动机器人行走机构概述机器人行走机构按照其运动轨迹可分为固定式轨迹和无固定式轨迹两种。
固定式轨迹主要用于工业机器人,它是对人类手臂动作和功能的模拟和扩展;无固定轨迹就是指具有移动功能的移动机器人,它是对人类行走功能的模拟和扩展。
移动机器人的行走结构形式主要有:车轮式移动结构;履带式移动结构;步行式移动结构。
此外,还有步进式移动结构、蠕动式移动结构、混合式移动结构和蛇行式移动结构等,适合于各种特别的场合。
从移动机器人所处环境看,可以分为结构环境和非结构环境两类。
结构环境:移动环境是在轨道上(一维)和铺好的道路(二维)。
在这种场合,就能利用车轮移动结构。
非结构环境:陆上二维、三维环境;海上、海中环境;空中宇宙环境等原有的自然环境。
陆上建筑物的阶梯、电梯、间隙沟等。
在这样的非结构环境领域,可参考自然界动物的移动机构,也可以利用人们开发履带,驱动器。
例如:2足、4足、6足及多足等步行结构。
行走结构的设计对于移动机器人的工作效率有着至关重要的作用,选择适当、精巧的行走结构往往可以大大提高机器人的动作效率。
这就需要我们熟悉和了解不同机器人行走结构的类型及特点。
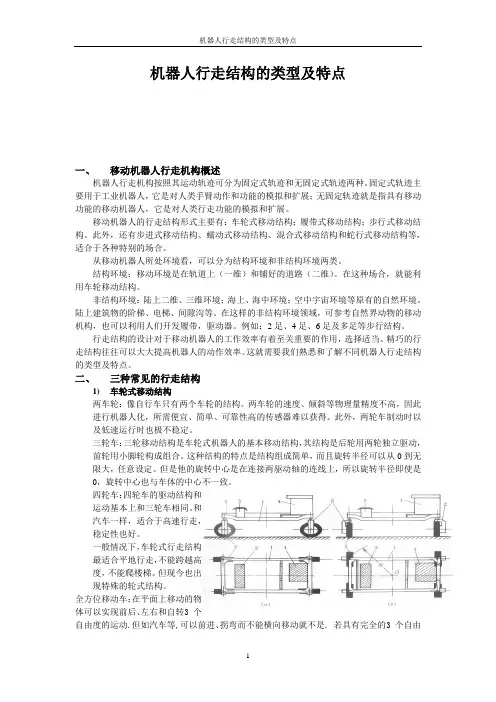
二、三种常见的行走结构1)车轮式移动结构两车轮:像自行车只有两个车轮的结构。
两车轮的速度、倾斜等物理量精度不高,因此进行机器人化,所需便宜、简单、可靠性高的传感器难以获得。
此外,两轮车制动时以及低速运行时也极不稳定。
三轮车:三轮移动结构是车轮式机器人的基本移动结构,其结构是后轮用两轮独立驱动,前轮用小脚轮构成组合。
这种结构的特点是结构组成简单,而且旋转半径可以从0到无限大,任意设定。
但是他的旋转中心是在连接两驱动轴的连线上,所以旋转半径即使是0,旋转中心也与车体的中心不一致。
四轮车:四轮车的驱动结构和运动基本上和三轮车相同。
和汽车一样,适合于高速行走,稳定性也好。
一般情况下,车轮式行走结构最适合平地行走,不能跨越高度,不能爬楼梯。


工业机器人内部结构及基本组成原理详解展开全文工业机器人详解你对工业机器人有着什么样的了解?关于工业机器人,我们过去也反反复复推送了很多的文章,在这一次,我们将尝试解决有关---在工业环境中使用的最常见的机器人和作业时经常会遇到的问题。
关于工业机器人定义什么可以被认为是一个工业机器人?什么不能被称为工业机器人?工业机器人直到最近才能避开这种混乱。
不是在工业环境中使用的每个机电设备都可以被认为是机器人。
根据国际标准组织的定义,工业机器人是一种可编程的三自由度或多轴自动控制的可编程多用途机械手。
这几乎是在谈论工业机器人时被接受的定义。
工业机器人自中年以来发生了什么变化?越来越多的工程师和企业家正在寻找越来越多的机器人技术,帮助在工业环境中优化工作流程的方式。
随着时代的发展和机器人技术的进步,机器人手臂必须为诸如仓储中使用的群组AGV等新手铺路。
我们经常说典型的工业机器人由工具,工业机器人手臂,控制柜,控制面板,示教器以及其他外围设备组成。
那么这些是什么?这些部分通常都在一起,控制柜类似于机器人的大脑。
控制面板和示教器构成用户环境。
工具(也称为末端执行器)是为特定任务设计的设备(例如焊接或喷涂)。
机器人手臂基本上是移动工具的东西。
但并不是每个工业机器人都像一个手臂。
不同机器人有不同类型的结构。
控制面板---操作员使用控制面板来执行一些常规任务。
(例如:改变程序或控制外围设备)。
应用“机器人工人”----什么时候应该使用工业机器人而不是人工?相信这个问题大家思考的次数并不少了。
理想情况下,这应该是双赢的。
想快速看到效果,你需要知道什么是别人最不喜欢的工作。
想得最多的是那些重复的,乏味的工作,需要从工作人员那边进行大量单调的行动,这个思考是正确的,因为正是如此,例如从一个输送机到另一个输送机。
如果总是相同的任务,您可以使用专门针对您的需求量身定制的自动化解决方案。
工厂的工作处理需要越来越灵活,在这些情况下,正确的解决方案是:可以试用用于不同任务的可重新编程的机器人进行任务操作。


机器人行走机构原理机器人行走机构是指用于控制机器人移动和行走的结构和装置。
它是实现机器人在不同环境中自由移动和执行任务的关键部件。
机器人行走机构的设计和原理直接影响着机器人的稳定性、速度、灵活性和适应性。
1. 基本概念在探讨机器人行走机构的原理之前,先来了解一些基本概念:•步态(Gait):指机器人在运动过程中,支撑腿与摆动腿之间的相对运动规律。
不同步态适用于不同环境和任务需求。
•支撑腿(Support Leg):指在行走过程中用于支撑和稳定身体的腿。
•摆动腿(Swing Leg):指在行走过程中用于推进身体向前移动的腿。
•步态周期(Gait Cycle):指完成一次完整步态所需要的时间。
•步幅(Stride Length):指每一步前进的距离。
2. 行走方式2.1. 轮式行走轮式行走是最常见且简单的行走方式之一。
它使用轮子作为机器人的运动部件,通过控制轮子的转动来实现机器人的行走。
轮式行走机构可以分为两种类型:差速驱动和全向驱动。
2.1.1. 差速驱动差速驱动是指通过控制左右两侧轮子的转速差异来实现机器人的转弯和定位。
当左右两侧轮子转速相等时,机器人直线行走;当两侧轮子转速不等时,机器人会产生转向力矩,从而实现转弯。
差速驱动的优点是结构简单、成本低廉,适用于平坦且无障碍物的环境。
然而,它在不同地面上的摩擦力变化较大时容易出现滑移现象,并且在越野或不平坦地形上表现较差。
2.1.2. 全向驱动全向驱动是指通过控制多个轮子(通常是三个或四个)以不同方向和速度旋转来实现机器人的任意方向移动。
全向驱动可以通过组合直线运动和旋转运动来实现复杂路径的行走。
全向驱动的优点是机器人具有更好的机动性和灵活性,能够在狭窄空间中进行精确移动和定位。
然而,全向驱动的结构复杂、成本较高,并且对地面摩擦力要求较高。
2.2. 腿式行走腿式行走是模仿生物行走方式的一种机器人行走方式。
它使用类似于生物的腿部结构来实现机器人的行走。
机器人本体组成机器人本体就是机器人的机械部分,又叫操作机,是工业机器人的操作机构,是指工业机器人的原样和自身。
整体机器人还有其它的配套软件和配套设备组成。
机器人本体基本结构由五部分组成:1、传动部件;2、机身及行走机构;3、臂部;4、腕部;5、手部。
机器人本体结构是机体结构和机械传动系统,也是机器人的支承基础和执行机构。
机器人本体的结构特点有:1、工业机器人本体可以简化成各连接杆首尾相连、末端开放的一个开式运动链,机器人本体的结构刚度差,并随空间位置的变化而变化;2、机器人本体的每个连杆都具有独立的驱动器,连杆的运动各自独立,运动更为灵活;一般连杆机构有1-2个原动件,各连杆间的运动是相互约束的。
3、连杆驱动扭矩变化复杂,和执行件位置相关。
对机器人本体的基本要求:自重小:改善机器人操作的动态性能;静动态刚度高:提高定位精度和跟踪精度;增加机械系统设计的灵活性;减小定位时的超调量稳定时间,降低对控制系统的要求和系统造价;固有频率高:避开机器人的工作频率,有利于系统的稳定。
好的机器人本体门槛很高,除了电机、减速机的硬伤之外,好的结构设计也非常难,这就是为什么国内机器人本体做得好的、批量生产一致性很好的机器人厂商很少。
如果能在这个上面有所突破,那就非常有前途。
很多人都认为机器人本体无非是实际各个轴的相对连接,本体制造多样,一般是铸铝。
但是实际上好的机器人本体要复杂得多,会有很多细节的问题:比如说如果让重心降低,性能提升;电机与减速机的装配如何保证精度;本体的制造工艺如何保证一致性,装配如何实际稳定产量;如何解决电机散热问题;如何保证线缆长时间不损坏;如何保证机器人重复定位精度保持稳定;如何提高机器人动作的平滑,特别是低速运行时不会抖动。
机器人行走机构原理6机器人行走机构是指机器人用来实现行走动作的一种机构。
机器人行走机构的设计和原理对机器人的运动能力和稳定性有着重要的影响。
本文将从机器人行走机构的原理、分类、应用以及发展趋势等方面进行介绍。
一、机器人行走机构的原理机器人行走机构的原理是通过合理的机械结构和动力系统来实现机器人的行走动作。
机器人行走机构的设计要考虑机器人的载重能力、稳定性、效率和适应性等方面的需求。
常见的机器人行走机构有轮式行走机构、足式行走机构和履带式行走机构等。
1. 轮式行走机构:轮式行走机构是指机器人使用轮子作为行走的主要方式。
轮式行走机构具有结构简单、稳定性好、运动效率高等优点,适用于平坦地面的行走。
常见的轮式行走机构有两轮、四轮和六轮等。
2. 足式行走机构:足式行走机构是指机器人使用脚部来进行行走的机构。
足式行走机构可以模拟人类和动物的行走方式,具有较强的适应性和灵活性。
常见的足式行走机构有两足、四足和多足等。
3. 履带式行走机构:履带式行走机构是指机器人使用履带作为行走的方式。
履带式行走机构具有良好的通过性和承载能力,适用于各种复杂地形的行走。
常见的履带式行走机构有链式履带和橡胶履带等。
二、机器人行走机构的分类机器人行走机构可以按照不同的分类方法进行分类,常见的分类方法有以下几种:1. 按照动力系统分类:机器人行走机构可以分为液压驱动、电动驱动、气动驱动等不同的动力系统。
2. 按照行走方式分类:机器人行走机构可以分为轮式行走、足式行走和履带式行走等不同的行走方式。
3. 按照机械结构分类:机器人行走机构可以分为并联机构、串联机构和混合机构等不同的机械结构。
三、机器人行走机构的应用机器人行走机构的应用非常广泛,主要包括以下几个方面:1. 工业领域:机器人行走机构在工业生产中广泛应用,可以用于物料搬运、装配、焊接等工作。
2. 农业领域:机器人行走机构可以应用于农业机械化,实现农田作业、果园管理等任务。
3. 探测领域:机器人行走机构可以应用于探测任务,如火星探测器、海底探测器等。