【精品毕设】多足机器人行走机构设计
- 格式:doc
- 大小:431.00 KB
- 文档页数:17
河北能源职业技术学院《行走机器人功能分析与调试》摘要:虽然机器人的研究、制作和使用已经有几十年的历史,但是双足直立行走的机器人世界上很少。
主要因为稳定性控制及双足行走控制非常复杂,但为了研究出与人更加接近的机器人,这是必须克服的难关。
主要是解决直立行走机器人腿部平衡的问题,包括硬件设计和软件的设计,侧重于对硬件的设计,即着重介绍直立行走机器人腿部平衡系统的相关知识、设计目的、设计思路、方案的确定、原理设计及分析、硬件调试。
行走机器人是最典型的机电一体化数字化装备,是集机械、电子、控制、计算机、传感器、人工智能等多学科先进技术于一体的智能机器人。
它代表了机器人的尖端技术,是当代科技的研究热点之一。
目前,国内双足机器人研究与世界先进水平相比还有较大差距,特别是在教学机器人方面的研究更是寥寥无几。
为改善这种局面,提高我国高校师生的综合技能,本论文在研制教学双足机器人方面进行了有益的尝试和大胆的实践,设计并制作出了一款适用于高校教学开发使用的小型双足行走机器人。
本文详细阐述了双足机器人机构设计和控制系统的研发过程,包括控制系统的硬件电路设计和制作,机器人双足的外形设计与加工,以及双足行走机器人的驱动和控制技术。
结合对人类行走步态的研究,规划了双足机器人行走的姿态及轨迹,推导了双足机器人稳定步行的条件,并据此进行了实物实验,实现了稳定的低速静态步行。
本论文重点讨论了静态步行的算法设计和仿真,详细分析了基于零力矩点的双足机器人动态步行运动规划方法,根据运动学约束条件计算出各个关节的运动轨迹。
使用Matlab软件,以ZMP点的轨迹作为约束条件,进行了前向离线规划试验和ZMP误差补偿试验,实验证明本文所采用的步态规划方法可以满足机器人连续稳定行走的要求。
教学双足机器人运动平稳,系统控制精度高,具有良好的教学功能和广阔的应用开发前景。
本文针对教学双足行走机器人方面进行了深入的研究,对他人今后进行教学双足机器人的研究提供了一套系统的研究方法,对同行具有借鉴和引导作用。
双足技术设计1.引言本文档旨在介绍双足技术设计的细节和要点。
双足是一种仿真人类双腿行走的,具备稳定性、灵活性和智能性。
该文档将涵盖双足的硬件设计、动力系统、步态规划、感知与导航等关键方面的设计内容。
2.双足的硬件设计2.1 机械结构设计2.1.1 身体结构设计2.1.2 关节设计2.1.3 材料选择2.2 传感器选择与布置2.2.1 视觉传感器2.2.2 陀螺仪与加速度计2.2.3 压力传感器2.3 控制器设计2.3.1 控制器类型选择2.3.2 控制器布局与组织3.双足的动力系统3.1 动力源设计3.1.1 电源类型选择3.1.2 电源功率计算3.2 动力传输设计3.2.1 电机类型选择3.2.2 齿轮传动设计3.3 动力控制设计3.3.1 速度控制算法3.3.2 力矩控制算法4.双足的步态规划4.1 步态分析4.1.1 单支撑相与双支撑相4.1.2 步长与步频计算4.2 步态规划算法4.2.1 基于倒立摆模型的步态规划4.2.2 模仿学习算法的步态规划5.双足的感知与导航5.1 视觉感知5.1.1 目标检测与跟踪5.1.2 场景理解与地图5.2 位置定位与姿态估计5.2.1 GPS定位5.2.2 惯性测量单元(IMU)定位5.3 路径规划与控制5.3.1 基于地图的路径规划5.3.2 避障算法设计6.附件本文档涉及的附件包括技术图纸、控制算法代码、测试数据等。
附件的详细内容可在实际项目中进行补充。
7.法律名词及注释- 专利权:对新发明的技术、产品或方法享有的独有权利。
- 商标:用于标识和区分商品或服务来源的符号、标记或名称。
- 著作权:对文学、艺术、科学作品的独立创作享有的法律权益。
双足仿生机器人行走机构设计
双足仿生机器人行走机构设计一般包括以下几个关键部分:
1. 足底结构:足底结构是机器人与地面接触的部分,需要具备良好的稳定性和抓地力。
一般采用橡胶材料制作,设计有凹凸纹路或者类似动物脚掌的结构,以增加摩擦力和抓地力。
2. 关节设计:双足仿生机器人的每个腿部都需要多个关节来实现自由运动。
关节设计需要考虑到机器人的稳定性和灵活性,一般采用电机驱动的旋转关节或者液压/气动驱动的线性关节。
3. 动力系统:机器人行走需要动力系统提供能量。
一般采用电池或者电源供电,驱动关节的电机需要具备足够的扭矩和速度来实现机器人的行走。
4. 传感器:为了实现机器人的平衡和姿态控制,需要配备各种传感器。
例如,陀螺仪和加速度计可以用来检测机器人的倾斜角度,力传感器可以用来感知地面反作用力,视觉传感器可以用来感知周围环境。
5. 控制系统:双足仿生机器人的行走需要一个高效的控制系统。
控制系统可以根据传感器的反馈信息,实时调整关节的运动,以保持机器人的平衡和稳定。
总体来说,双足仿生机器人行走机构设计需要考虑到稳定性、灵活性、能量效率和控制系统的要求。
具体的设计方案需要根据机器人的应用场景和需求来确定。
燕山大学本科毕业设计(论文)文献综述课题名称:学院(系):年级专业:学生姓名:指导教师:完成日期:一、课题国内外现状步行机器人,简称步行机 ,是一种智能型机器人 , 它是涉及到生物科学 , 仿生学 , 机构学 , 传感技术及信息处理技术等的一门综合性高科技 . 在崎岖路面上 ,步行车辆优于轮式或履带式车辆 .腿式系统有很大的优越以及较好的机动性 , 崎岖路面上乘坐的舒适性 ,对地形的适应能力强 .所以 ,这类机器人在军事运输 , 海底探测 , 矿山开采 , 星球探测 , 残疾人的轮椅 , 教育及娱乐等众多行业 ,有非常广阔的应用前景 , 多足步行机器人技术一直是国内外机器人领域的研究热点之一。
步行机器人历经百年的发展, 取得了长足的进步, 归纳起来主要经历以下几个阶段[5]:第一阶段, 以机械和液压控制实现运动的机器人。
第二阶段, 以电子计算机技术控制的机器人。
第三阶段, 多功能性和自主性的要求使得机器人技术进入新的发展阶段。
闰尚彬,韩宝玲,罗庆生针对仿生六足步行机器人关节较多,其步态轨迹规划和关节控制量计算都较为复杂的现状,采用Solidworks软件与MSC.ADAMS 软件相结合的方式对六足仿生步行机器人的样机模型进行了运动学仿真与分析.通过仿真,验证了所设计的三角步态的适用性和所选择的三次样条曲线作为机器人足端点轨迹曲线方案的可行性.韩宝玲王秋丽罗庆生基于六足仿生步行机器人机构学特性的研究,采用数值分析法求解了机器人步行足的足端工作空间,利用虚拟样机技术计算了机器人的灵活度,从两方面综合衡量六足仿生步行机器人的工作能力,并以六足步行机器人各腿节比例关系的确定为例,介绍了六足步行机器人结构优化的具体方案.苏军陈学东田文罡研究六足步行机器人全方位行走步态,分析其静态稳定性;规划了典型直线行走步态和定点转弯步态,确定了直线行走步态最大跨步和定点转弯步态最大转角;进行了步态控制算法模拟仿真及实地步行实验。
燕山大学本科毕业设计(论文)文献综述课题名称:步行机器人的研究学院(系):机械工程学院年级专业: 05级机电1班学生姓名:指导教师:完成日期: 2009年3月2号一、课题国内外现状多足步行机器人是一种具有冗余驱动、多支链、时变拓扑运动机构, 是模仿多足动物运动形式的特种机器人, 是一种足式移动机构。
所谓多足一般指四足及四足其以上, 常见的多足步行机器人包括四足步行机器人、六足步行机器人、八足步行机器人等[4]。
步行机器人历经百年的发展, 取得了长足的进步, 归纳起来主要经历以下几个阶段[5]:第一阶段, 以机械和液压控制实现运动的机器人。
第二阶段, 以电子计算机技术控制的机器人。
第三阶段, 多功能性和自主性的要求使得机器人技术进入新的发展阶段。
雷静桃等在文献[1]中对美国、日本等机器人研究大国及我国的多足步行机器人研究发展进行了综述,对多足步行机器人急需解决的问题进行了论述,并对未来可能的研究发展方向进行了展望。
刘静等在文献[10]中分析了国内外腿式机器人的研究现状,讨论了腿式机器人在机械结构、稳定性和控制算法方面的现有研究方法,给出了腿式机器人研究存在的问题,展望了腿式机器人的发展方向.安丽桥等在文献[9]中介绍了一种应用两个电机驱动的六脚足式步行机器人,并对该机器人的运动机理与步态进行了分析,经样机实验,所设计的机器人可实现前进、后退、遇障转弯等功能,具有结构简单,控制便捷,行走稳定的特点。
曾桂英等在文献[2]中提出了一种采用液压驱动的缩放式腿机构的结构设计, 并针对六足行走方式, 完成了液压驱动原理设计及PLC控制设计。
马东兴等在文献[11]中研究了一种背部带关节的新型四足机器人,通过三维建模软件Pro /E和机械系统动力学仿真分析软件ADAMS建立了四足机器人虚拟样机,规划了四足机器人的步态,并且利用ADAMS仿真软件对该四足机器人进行了步态仿真,同时利用单个AT89C52单片机成功实现对四足机器人5个舵机的独立控制以及舵机的速度控制。
仿人双足机器人机构的设计毕业论文毕业设计中文摘要仿人双足机器人是机器人研究的前沿领域,是多种科技的结合,代表一个国家的技术水平。
仿人双足机器人最大的特征就是双足步行,因此它的灵活性很高,可以代替人类完成危险作业。
本文回顾了国内外仿人双足机器人的发展历史,在分析人类下肢结构的基础上,确定机器人机构的自由度配置、关节结构及驱动形式。
在inventor环境下进行机构的建模及装配,完成仿人双足机器人机构的设计,最后对仿人双足机器人机构进行运动模拟和强度分析,检验机构的运动性能和强度,进一步优化机构的设计。
关键词:仿人双足机器人,机构设计,运动模拟,强度分析毕业设计外文摘要TitleDesignofhumanoidbipedrobotAbstractHumanoidbipedrobotisafrontierfieldofrobotresearch,istheco mbinationofscienceandtechnology,thetechnicallevelonbehalfofa country''s.Characteristicsofhumanoidbipedrobotisthebiggestbip edwalking,soitshighflexibility,canreplacehumandodangerouswor k.Thispaperreviewsthedevelopmenthistoryofdomesticandforei gnhumanoidbipedrobot,basedonanalysisofhumanlowerlimbstructure,determinetherobotDOFconfiguration,jointstructureanddriv emode.Modelingandassemblymechanismbasedoninventor,com pletedthedesignofhumanoidbipedrobotmechanism,finallycarries ontheanalysisofmotionsimulationandstrengthofhumanoidbipedr obot,motionperformanceandthestrengthoftheinspectionorganiz ation,andfurtheroptimizethemechanismdesign.KeywordsHumanoidbipedrobot,mechanismdesign,motionsimulation,strengthanalysis目录1绪论..................................................................................................11.1课题研究的意义...........................................................................11.2国内外仿人双足机器人发展现状................................................21.3本课题研究的主要内容.............................................................112仿人双足机器人机构设计.............................................................122.1人体下肢分析.............................................................................122.2仿人双足机器人总体设计..........................................................202.3仿人双足机器人关节设计..........................................................232.4仿人双足机器人总体结构..........................................................352.5本章小结....................................................................................373机器人机构的运动模拟.................................................................383.1行走的运动模拟.........................................................................383.2蹲下的运动模拟.........................................................................413.3转弯的运动模拟.........................................................................433.4本章小结....................................................................................434机器人机构的强度分析.................................................................454.1静态强度分析.............................................................................454.2运动载荷下的强度分析.............................................................484.3本章小结....................................................................................51结论....................................................................................................52致谢.................................................................错误~未定义书签。
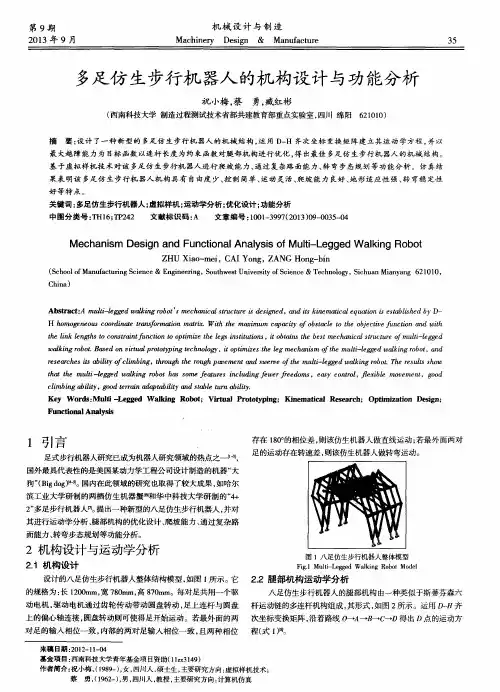
摘要本文介绍了一种应用两个电机驱动的六足式步行机器人,并对该机器人的运动机理与步态进行了分析,经样机实验,所设计的机器人可实现前进、后退、遇障转弯等功能,具有结构简单,控制便捷,行走稳定的特点。
基于仿生学原理,应用连杆机构学中的Robert原理,设计出一连杆轨迹能较好地近似于机器人理想足部轨迹的四杆机构,选择足部运动曲线并在图谱上找到该曲线,以确定四杆机构的各个参数。
由参数和电动机的输出转矩就能确定足部的线速度和加速度。
并通过PRO/E软件,对用这一连杆机构作为腿部机构的六足机器人进行了前进和转弯步态建模,并对它进行了稳定裕量分析,包括静力学分析和动力学分析。
针对这种腿部结构设计了六足的行走方式,通过对12个步进电机的控制,采用三角步态,实现了六足机器人的直行功能。
仿真及试验证明,这种结构能较好地维持六足机器人自身的平衡,并且对今后更深入地研究六足机器人抬腿行走姿态及可行性,具有较高的参考价值。
关键词:六足机器人;行走步态;运动原理;稳定性;四杆机构abstractThis paper introduced a six-legged walking robot propelled by two electromotors,and analyzed the robot's kinetic mechanism and walking style.Proved by the model test,the robot is capable of actions such as forwarding,backwarding and veering in the case of obstruction.The robot demonstrates such advantages as simple structure,comfortable control and stable performance of pacing.Based on the principle of bionics,this paper designs a four-linked mechanism using Robert principle,which can approximate the ideal trace of robot's leg ,choose the sport curve of the foot department, then check to find out that curve on the diagram, the old ability but locations can make sure four each parameters of the pole structure, can make sure the line speed and accelerations of the foot department from the exportation dint of the parameter and electric motor. Some simulations about the hexapod robot which uses the six-linked mechanism as its leg are made,and carried on the stability to it analysis, include the quiet mechanics analysis and dynamics analysis.A hexapod walking mode was designed according to this structure.By controlling 12 step motors straight walking function of the hexapod robot has been implemented with tripod gait movement.Simulation and experiment show that this structure can keep the hexapod robot body's balance better,providing high reference value to research the advantage and feasibility of leg-raising walking gesture.Keyword: six foot robot; Tread the appearance of walk; The sport principle; Stability; Four pole organizations目录摘要 (I)abstract .............................................................................................................. I I 1 绪论. (1)1.1国内外机器人的研究现状 (1)1.2机器人的主要研究问题 (3)1.3机器人的发展趋势 (5)1.4本课题所研究的主要内容 (6)2 机械机构设计 (6)2.1机构分析 (6)2.2 设计方法 (12)2.3四连杆机构的设计 (13)2.4四个钣金零件设计 (28)2.5 躯体部分机构设计 (33)2.6 机构设计总结 (34)参考文献 (35)致谢 (37)附录一 (50)附录二 (61)1 绪论1.1国内外机器人的研究现状1.1.1机器人的定义机器人是上个世纪人类最伟大的发明之一,而从机器人的角度来讲,21世纪将是一个自治机器人的世纪。
毕业设计(论文)四足步行机器人腿的机构设计学生姓名:学号:所在系部:专业班级:指导教师:日期:摘要本文介绍了国内外四足步行机器人的发展状况和三维制图软件SolidWorks的应用,着重分析了设计思想并对行走方式进行了设计并在此软件基础上四足步行机器人腿进行了绘制,对已绘制的零部件进行了装配和三维展示。
展示了SolidWorks强大的三维制图和分析功能。
同时结合模仿四足动物形态展示出了本次设计。
对设计的四足行走机器人腿进行了详细的分析与总结得出了该机构的优缺点。
本文对四足机器人腿的单腿结构分析比较详细,并结合三维进行理性的理解。
关键词:SolidWorks;足步行机器人腿AbstractIn this paper, fouth inside and outside the two-legged walking robot and the development of three-dimensional mapping of the application of SolidWorks software, focused on an analysis of design concepts and approach to the design of walking and the basis of this software quadruped walking robot legs have been drawn on components have been drawn to the assembly and three-dimensional display. SolidWorks demonstrated a strong three-dimensional mapping and analysis functions. At the same time, combined with four-legged animal patterns to imitate the design show. The design of four-legged walking robot legs to carry out a detailed analysis and arrive at a summary of the advantages and disadvantages of the institution. In this paper, four single-legged robot more detailed structural analysis, combined with a rational understanding of three-dimensional.Keywords:SolidWorks; four-legged walking robot目录摘要 (I)Abstract (II)1 绪论 (1)1.1 步行机器人的概述 (1)1.2 步行机器人研发现状 (1)1.3 存在的问题 (5)2 四足机器人腿的研究 (6)2.1 腿的对比分析 (6)2.1.1 开环关节连杆机构 (6)2.1.2 闭环平面四杆机构 (9)2.2 腿的设计 (11)2.2.1 腿的机构分析 (12)2.2.2 支撑与摆动组合协调控制器 (18)2.3 单条腿尺寸优化 (21)2.3.1 数学建模 (21)2.3.2 运动特征的分析 (23)2.4 机器人腿足端的轨迹和运动分析 (24)2.4.1 机器人腿足端的轨迹分析 (24)2.4.2 机器人腿足端的运动分析 (27)3 机体设计 (30)3.1 机体设计 (30)3.1.1 机体外壳设计 (30)3.1.2 传动系统设计 (31)3.2 利用Solid Works进行腿及整个机构辅助设计 (35)4 结论 (36)4.1 论文完成的主要工作 (36)4.2 总结 (36)参考文献 (37)致谢 (39)1绪论1.1 步行机器人的概述机器人相关的研发和应用现如今早已变成每个国家的重要科研项目之一,通过运用机器人来代替人们的某些危险工作或者帮助残疾人完成自己所不能完成的事情。
机械毕业设计1107步行式机器人结构设计引言步行式机器人是一种能够模仿人类行走方式的机器设备,具有广泛的应用前景。
本文旨在设计一种步行式机器人的结构,以满足特定的功能需求。
本文将讨论机器人的主要组成部分、运动方式和结构设计。
机器人的主要组成部分步行式机器人的主要组成部分包括:1. 机械结构:包括机器人的身体框架、关节和传动系统等。
2. 传感器:用于感知环境和获取数据,如摄像头、激光雷达等。
3. 控制系统:用于控制机器人的运动和决策,包括硬件和软件部分。
机器人的运动方式步行式机器人可以采用不同的运动方式,如行走、爬行、跳跃等。
在本设计中,我们将采用行走作为主要的运动方式。
机器人的行走将通过控制关节和传动系统的运动来实现。
结构设计在机器人的结构设计中,我们需要考虑以下因素:1. 载重能力:机器人需要有足够的强度和稳定性来携带所需的载荷。
2. 灵活性:机器人的关节和传动系统需要设计成能够自由运动和适应不同地形的形态。
3. 节约能源:机器人的结构应该尽量减少能量消耗,以延长电池寿命。
4. 安全性:机器人的结构应该具备抗震性和防护性,以应对意外情况。
根据以上考虑,我们设计了如下的机器人结构:1. 身体框架:采用轻量化的材料,如铝合金,以提供强度和稳定性。
2. 关节设计:采用多自由度关节,以实现机器人的灵活运动。
3. 传动系统:采用高效的传动装置,如电机和减速器,以提供足够的驱动力。
4. 支撑结构:在机器人的脚部设计中,采用合适的支撑结构和接触材料,以适应不同地形并提供稳定性。
结论本文提出了一种步行式机器人的结构设计,包括主要组成部分、运动方式和结构设计。
该设计考虑了机器人的功能需求,如载重能力、灵活性、节约能源和安全性。
通过采用合适的材料和装置,并结合智能控制系统,我们可以设计出一种满足特定需求的步行式机器人。
参考文献[1] 张三,李四. 步行式机器人结构设计研究. 机械工程学报, 2020, 48(10): 123-135.。
双足仿生机器人行走机构设计1. 引言双足仿生机器人是一种模仿人类步行方式的机器人,其行走机构的设计是实现机器人自主行走的关键。
本文将介绍双足仿生机器人行走机构的设计原理、结构与控制方法。
2. 设计原理双足仿生机器人的行走机构设计基于人类步行的原理。
人类步行是一种交替进行的两足动作,每步分为摆动相和支撑相。
在摆动相中,一只脚离地,并向前摆动;在支撑相中,另一只脚着地支撑身体。
机器人的行走机构需要模拟这一过程,通过控制各关节的运动实现机器人的步行。
3. 结构设计双足仿生机器人的行走机构包括传感模块、控制模块和执行模块。
传感模块用于感知机器人身体姿态和环境信息,如倾斜角、步长和地面状态等。
控制模块根据传感器信号和预设的步态参数计算关节的运动轨迹和力矩控制信号。
执行模块根据控制模块的指令,控制各关节运动,实现机器人的步行。
具体的结构设计包括:3.1 关节设计双足仿生机器人的关节设计需要考虑力矩传输、运动范围和结构强度等因素。
一般采用电机驱动的关节设计,通过控制电机的转动角度和力矩,实现机器人的步行动作。
3.2 脚底设计机器人的脚底设计需要考虑地面的摩擦力、稳定性和抗震性等因素。
一般采用具有摩擦力的材料作为脚底,例如橡胶或塑料材料。
同时,在脚底设计中还可以添加传感器,用于感知地面的状态和表面特征。
3.3 稳定性设计双足仿生机器人的稳定性设计是保证机器人能够在不倒地的情况下行走。
稳定性设计包括重心的控制、姿态的调节和动态平衡控制等。
通过控制机器人的关节运动和重心转移,使机器人能够保持平衡并行走。
4. 控制方法双足仿生机器人的行走机构控制方法包括开环控制和闭环控制两种。
4.1 开环控制开环控制是指根据预设的步态参数,通过控制各关节的运动轨迹和力矩,实现机器人的步行。
开环控制简单但稳定性较差,容易受到外界干扰影响。
4.2 闭环控制闭环控制是根据传感器信号和控制模块的反馈信息,实时调整关节的运动轨迹和力矩,以实现更加稳定的步行。
行走机构模型设计方案行走机构是机器人最基本的动力传输组件之一,其设计方案需要考虑机械结构、动力传输和控制系统等因素。
下面是一个行走机构模型的设计方案,包括机构结构、动力传输和控制系统。
机构结构:行走机构的机构结构可以采用六足机器人的设计,六足机器人由六个腿组成,每个腿包括几个连杆和关节。
连杆由附着在关节上的电机驱动,通过关节的运动实现腿部的伸缩和转动。
整个机构结构应该具备足够的承重能力和稳定性。
动力传输:行走机构的动力传输可以采用电机驱动的方式,每个腿部都需要一个电机来驱动其运动。
这些电机应该具备足够的扭矩和转速,以便使机器人能够行走在不同的地形上。
电机的控制可以采用脉冲宽度调制(PWM)技术,通过改变电机转速和方向来控制腿部的运动。
控制系统:行走机构的控制系统可以采用嵌入式控制器来实现。
嵌入式控制器可以通过传感器获取机器人的姿态信息和环境信息,然后根据这些信息来控制电机的运动。
控制系统应该具备实时性和稳定性,能够快速响应环境变化和机器人姿态的变化。
此外,还可以加入自动避障算法,使机器人能够自动避开障碍物。
自动避障算法可以通过激光或超声波传感器来检测周围的障碍物,并根据检测结果来调整机器人的行走路径。
避障算法应该能够高效地计算机器人的最佳行走路径,并能够避开复杂的障碍物。
同时,为了提高机器人的行走效率和稳定性,可以在行走机构中加入一些附加装置,如惯性传感器和阻尼器。
惯性传感器可以感知机器人的姿态和运动状态,并根据需要来调整机器人的行走步态。
阻尼器可以增加机器人的稳定性,减小机器人的震动和抖动。
综上所述,一个完整的行走机构模型设计方案应该考虑机构结构、动力传输和控制系统等因素。
这些设计方案可以根据实际需求进行调整和优化,以提高机器人的行走效率和稳定性。
……………………. ………………. ………………… 山东农业大学 毕 业 论 文题目:多足仿生机器人单步行足结构设计院 部机械与电子工程学院 专业班级 车辆工程2班 届 次 2014 学生姓名 薛光耀 学 号 20100658 指导教师 吕钊钦 二O 一四年六月十五日装 订 线 ……………….…….………….…………. ………摘要 (III)Abstract: (IV)引言 (5)1 多足仿生机器人研究现状以及发展趋势 (1)1.1 国外多足仿生机器人研究现状 (1)1.1.1 Lemur六足步行机器人 (1)1.1.2 “Big Dog”四足机器人 (2)1.1.3 仿生龙虾机器人 (2)1.2国内多足仿生机器人研究现状 (3)1.3 本课题主要完成工作内容 (4)2 模块化驱动关节设计 (4)2.1 驱动元件的选择 (4)2.2 传动方案的确定 (8)2.2.1绳轮传动方式 (8)2.2.2 带传动 (8)2.2.3 链轮传动 (9)2.2.4 连杆传动 (9)2.2.5 蜗轮蜗杆传动方式 (9)3 蜗杆减速箱体 (11)3.1 蜗杆减速箱体的设计 (11)3.2 蜗轮蜗杆减速箱的润滑 (13)3.2.1 润滑油种类的选择 (14)3.2.2 润滑油黏度的选择 (15)4 关节连接板的设计 (15)5 弹性足尖设计 (19)结论 (21)参考文献 (22)致谢 (24)Abstract: ...................................................................................................................................... I V Introduction . (5)1 bionic robot research status and development trend (1)1.1 Multilegged bionic robot research status abroad (1)1.1.1 Lemur Six-legged walking robot (1)1.1.2 “Big Dog”Quadruped robot (2)1.1.3 Bionic robot lobster (2)1.2 bionic robot research status (3)1.3 This topic mainly complete the work content (4)2 Modular joints design (4)2.1 The choice of drive components (4)2.2 The scheme determination of transmission (8)2.2.1 Rope wheel transmission ways (8)2.2.2 Tape drive (8)2.2.3 Sprocket drive (9)2.2.4 Connecting rod drive (9)2.2.5 Worm gear and worm drive way (9)3 Worm reducer casing (11)3.1 The design of the worm reduction box (11)3.2 The worm gear and worm reducer lubrication (13)3.2.1 The selection of lubricating oil (14)3.2.2 The choice of lubricant viscosity (15)4 The design of the joints connecting plate (15)5 Elastic toe design (19)Conclusion (21)Reference (22)Acknowledgement (24)多足仿生机器人单步行足结构设计作者:薛光耀,指导老师:吕钊钦(1.潍坊凯动动力,工程师;2.山东农业大学,教授)【摘要】本文针对于多足仿生机器人的应用,结构等几个方面,对其单步行足进行了详细的研究与讨论。
高职学生毕业设计题目:多足机器人行走机构设计学院: 机械自动化学院专业:学号:学生姓名:指导教师:日期:摘要本文旨在设计一种能够实现灵活、全方位运动的机器人的行走机构。
本文设计的多足步行机器人具有冗余驱动、运动拓扑的特点。
为实现其步行全方位机动性及作业多功能性,需要解决一系列的技术问题,而结构设计是其中的关键。
首先,对于国内外机器人的发展现状进行阐述和比较,并分析了多足机器人的研究趋势;接着,从机构自由度入手,明确设计思路,确定行走机构结构,对主要零件、构件进行设计,分析机构的受力情况,找出较危险的零件,并对其强度进行校核。
最后,初步研究了机器人的行动方式,拟定了简单的步态规划方案,规划了机器人直线行走步态、定点转弯步态。
关键词:多足机器人;机构自由度;行走机构;机构设计AbstractThis paper aims to design a travelling mechanism of a flexible and omnibearing motorial robot. The multiped walking robot referred to this paper has the characteristics of redandant drive and topological motion. In order to achieve its omnibearing walking mobility and working polyfunctionality, a series of technique questions need to resolved, of which the structural design is the key point.Firstly, the paper states the current situation of the robots development and compares the differences of the robots both domestic and overseas. Moreover ,it analyses the research trend of multiped robots. Secondly, it make clear of the designing ideas and confirm the travelling mechanism in terms of the structural variance,as well as designing the major parts and constuctional elements. Besides ,it analyses the stress state of the mechanism,trying to find out the rather dangerous parts and checking their intensity. Finally, it initially research the walking patterns of the robots and make out a simple tread program, which plans out the robot tread of linear walking and fixed point swerving.Keyword:Multiped robot;Degree of freedom;travelling mechanism;Mechanical design目录第一章绪论 (1)1.1 引言 (1)1.2国内外多足机器人发展概况 (1)1.3 多足机器人研究发展趋势 (3)第二章多足机器人行走机构的设计及校核 (5)2.1 多足机器人行走机构结构的拟定 (5)2.2 重要组件的设计及校核 (6)2.2.1 重要组件的选定 (6)2.2.2 圆柱凸轮的设计 (7)2.2.3 凸轮滚子轴的强度校核 (7)第三章其它部分设计 (9)3.1 电机和减速器的选用 (9)3.2 机器人步态初步规划 (9)设计总结 (11)参考文献 (12)致谢 (13)第一章绪论1.1 引言步行机器人是模仿动物的运动形式,采用腿式结构来完成多种移动功能的一类特种机起人。
四足步行机器人行走机构设计毕业设计篇一:四足步行机器人腿的机构设计毕业论文毕业设计(论文)四足步行机器人腿的机构设计学生姓名:学号:所在系部:专业班级:指导教师:日期:摘要本文介绍了国内外四足步行机器人的发展状况和三维制图软件SolidWorks的应用,着重分析了设计思想并对行走方式进行了设计并在此软件基础上四足步行机器人腿进行了绘制,对已绘制的零部件进行了装配和三维展示。
展示了SolidWorks强大的三维制图和分析功能。
同时结合模仿四足动物形态展示出了本次设计。
对设计的四足行走机器人腿进行了详细的分析与总结得出了该机构的优缺点。
本文对四足机器人腿的单腿结构分析比较详细,并结合三维进行理性的理解。
关键词:SolidWorks;足步行机器人腿AbstractIn this paper, fouth inside and outside the two-legged walking robot and the development of three-dimensional mapping of the application of SolidWorks software, focused on an analysis of designconcepts and approach to the design of walking and (原文来自:小草范文网:四足步行机器人行走机构设计毕业设计)the basis of this software quadruped walking robot legs have been drawn on components have been drawn to the assembly and three-dimensional display. SolidWorks demonstrated a strong three-dimensional mapping and analysis functions. At the same time, combined with four-legged animal patterns to imitate the design show. The design of four-legged walking robot legs to carry out a detailed analysis and arrive at a summary of the advantages and disadvantages of the institution. In this paper, four single-legged robot more detailed structural analysis, combined with a rational understanding of three-dimensional.Keywords: SolidWorks; four-legged walking robot 目录摘要 ................................................ ................................................... . (I)Abstract .......................................... ................................................... (II)1 绪论 ................................................ ................................................... .. (1)1.1 步行机器人的概述 ................................................ .. (1)1.2 步行机器人研发现状 ................................................ . (1)1.3 存在的问题 ................................................ .. (5)2 四足机器人腿的研究 ................................................ .. (6)2.1 腿的对比分析 ................................................ . (6)2.1.1 开环关节连杆机构 ................................................ (6)2.1.2 闭环平面四杆机构 ................................................ . (9)2.2 腿的设计 ................................................ (11)2.2.1 腿的机构分析 ................................................ (12)2.2.2 支撑与摆动组合协调控制器 ................................................ . (18)2.3 单条腿尺寸优化 ................................................ . (21)2.3.1 数学建模 ................................................ .. (21)2.3.2 运动特征的分析 ................................................ .. (23)2.4 机器人腿足端的轨迹和运动分析 ................................................ . (24)2.4.1 机器人腿足端的轨迹分析 ................................................ .. (24)2.4.2 机器人腿足端的运动分析 ................................................ .. (27)3 机体设计................................................. ................................................... . (30)3.1 机体设计 ................................................ (30)3.1.1 机体外壳设计 ................................................ (30)3.1.2 传动系统设计 ................................................ (31)3.2 利用Solid Works进行腿及整个机构辅助设计 (35)4 结论 ................................................ ................................................... (36)4.1 论文完成的主要工作 ................................................ .. (36)4.2 总结 ................................................ ................................................... .. 36参考文献 ................................................ ................................................... .. (37)致谢 ................................................ ................................................... (39)1 绪论1.1 步行机器人的概述机器人相关的研发和应用现如今早已变成每个国家的重要科研项目之一,通过运用机器人来代替人们的某些危险工作或者帮助残疾人完成自己所不能完成的事情。
毕业设计(论文)四足步行机器人设计说明书武汉理工大学毕业论文(设计)————————————————————————————————————————————摘要 ...................................... 4 1 绪论. (6)1.1综述 (6)1.2发展概况 (6)1.2.1国内发展概况 (7)1.2.2国外发展概况 (7)1.3课题背景 (8)1.4目的及意义 (8)1.5本文主要的研究工作 ................... 9 2 设计内容 (10)2.1理论依据 (10)2.2方案实施 (10)2.2.1方案比较: (12)2.2.2方案的选定 ..................... 12 3四杆机构的设计 (13)3.1基础理论知识 (13)3.1.1曲柄存在条件 (13)3.1.2急回运动特性和行程速比K (13)3.1.3压力角和传动角 (14)3.2轨迹设计 (15)3.3方案四杆机构的设计与计算 (16)3.3.1四杆尺寸 (16)武汉理工大学毕业论文(设计)————————————————————————————————————————————3.3.2最小传动角计算 (17)3.3.3步态分析 ....................... 18 4传动机构设计 (19)4.1传动方案及电机选择 (19)4.2同步带传动设计 (19)4.2.1确定计算功率 (19)4.2.2选择同步带型号 (20)4.2.3确定带轮齿数、和带轮节圆直径、 . 204.2.4验算带速 (20)4.2.5确定中心距和同步带节线长度及齿数 204.2.6作用在轴上的压力 ............... 21 5主轴组件设计 (22)5.1主轴组件的总体布置 (22)5.2主轴的结构设计 (22)5.2.1主轴的材料和热处理 (23)5.2.2初估轴径 (23)5.2.3轴的结构设计 (23)5.2.4轴的强度验算 ................... 25 6箱体设计 (27)6.1箱体材料的选择 (27)6.3箱体的加工 ......................... 28 7杆件布层 (30)武汉理工大学毕业论文(设计)————————————————————————————————————————————8操作与安装 .............................. 31 小结 ..................................... 32 致谢.................................... 34 参考文献 (35)武汉理工大学毕业论文(设计)————————————————————————————————————————————摘要在自然界或人类社会中,存在人类无法到达的地方和可能危及人类生命的特殊场合,如工地、防灾救援等许多领域,对这些复杂环境不断的探索和研究往往需要有机器人的介入。
毕业设计论文--六足机器人【摘要】本文设计了一种六足机器人,主要目的是能够在复杂的环境中进行移动和执行任务。
采用了ROS系统进行编程,结合外部传感器获取环境信息,控制机器人进行运动和动作控制。
在实验测试中,机器人成功完成了几个简单任务。
【关键词】六足机器人;ROS系统;任务执行【Abstract】This paper designs a hexapod robot which is designed to move and perform tasks in complex environments. ROS system is used for programming and external sensors are combined to obtain environmental information and control robot for motion and action control. In experimental testing, the robot successfully completed several simple tasks.【Keywords】Hexapod robot; ROS system; task execution一、前言机器人技术一直是人类追求的目标之一,机器人能够通过编程和传感器技术来执行任务,不但可以减轻人的工作负担,而且可以在危险环境中取代人的工作。
本文设计了一种六足机器人,采用了ROS系统进行编程,能够在复杂的环境中移动和执行任务。
机器人的有效载荷为5kg,机器人搭载了多个传感器,包括超声波传感器、红外传感器和陀螺仪等。
二、六足机器人的设计本文设计的六足机器人采用了六条悬架机构,能够使机器人在不平衡的地面上行走。
机器人的身体采用了金属材料,具有较强的抗压性和抗摔性。
机器人的尺寸为50cm x 50cm x 20cm,机器人的有效载荷为5kg。
高职学生毕业设计题目:多足机器人行走机构设计
学院: 机械自动化学院
专业:
学号:
学生姓名:
指导教师:
日期:
武汉科技大学高职生毕业设计(论文)
摘要
本文旨在设计一种能够实现灵活、全方位运动的机器人的行走机构。
本文设计的多足步行机器人具有冗余驱动、运动拓扑的特点。
为实现其步行全方位机动性及作业多功能性,需要解决一系列的技术问题,而结构设计是其中的关键。
首先,对于国内外机器人的发展现状进行阐述和比较,并分析了多足机器人的研究趋势;接着,从机构自由度入手,明确设计思路,确定行走机构结构,对主要零件、构件进行设计,分析机构的受力情况,找出较危险的零件,并对其强度进行校核。
最后,初步研究了机器人的行动方式,拟定了简单的步态规划方案,规划了机器人直线行走步态、定点转弯步态。
关键词:多足机器人;机构自由度;行走机构;机构设计。