机器人行走结构
- 格式:doc
- 大小:1.86 MB
- 文档页数:4

机器人行走机构分类一、简介机器人行走机构是指用于实现机器人行走功能的机械结构。
机器人的行走机构种类繁多,根据不同的应用需求和环境条件,可以选择合适的行走机构来满足机器人的运动要求。
本文将对常见的机器人行走机构进行分类介绍。
二、轮式行走机构轮式行走机构是最常见的机器人行走机构之一,其特点是结构简单、易于控制和稳定性较高。
轮式行走机构通常由两个或多个轮子组成,通过电机驱动轮子旋转,从而实现机器人的行走。
轮式行走机构适用于平坦的地面,并且能够快速移动。
三、履带式行走机构履带式行走机构采用履带来实现机器人的行走,其特点是具有较好的通过性和抓地力。
履带式行走机构通常由一条或多条履带组成,通过电机驱动履带的运动,从而实现机器人的行走。
履带式行走机构适用于复杂的地形和恶劣的环境条件,能够克服一些障碍物。
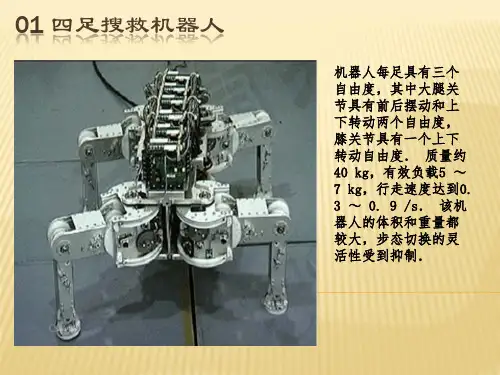
四、足式行走机构足式行走机构模仿了生物的步态,通过仿生设计实现机器人的行走。
足式行走机构通常由多个关节和连接件组成,通过电机驱动关节的运动,从而实现机器人的行走。
足式行走机构具有较好的灵活性和适应性,能够适应不同的地形和环境条件。
五、腿式行走机构腿式行走机构是一种特殊的行走机构,其特点是具有较好的稳定性和适应性。
腿式行走机构通常由多个腿部组成,通过电机驱动腿部的运动,从而实现机器人的行走。
腿式行走机构适用于复杂的地形和狭窄的空间,能够克服一些障碍物。
六、轮腿混合式行走机构轮腿混合式行走机构是将轮式行走机构和腿式行走机构结合起来的一种行走机构。
轮腿混合式行走机构通常由轮子和腿部组成,通过电机驱动轮子和腿部的运动,从而实现机器人的行走。
轮腿混合式行走机构综合了轮式行走机构和腿式行走机构的优点,能够在不同的地形和环境条件下灵活行走。
七、其他行走机构除了上述介绍的常见行走机构外,还有一些其他特殊的行走机构,如链式行走机构、球形行走机构等。
这些行走机构通常被应用于特定的领域和特殊的环境条件,具有一些特殊的优势。
八、总结机器人行走机构是机器人的重要组成部分,不同的行走机构适用于不同的应用场景。
收集的几种连杆机构机器人行走背后的机械原理(二)第三、克兰连杆机构(Crane Linkage)克兰连杆机构是一个六杆机构,相对于四杆的切比雪夫机构有着更好的受力性能。
其一般被用作仿生蜘蛛,拥有急回特性。
1、单个克兰连杆2、四腿行走机构(四个克兰机构)3、六腿行走机构(六个克兰机构)第四,RPRPR支腿机构第五,Tokyo Institute of Technology支腿机构第六、缩放腿机构第七、八杆腿机构第八、Trotbot腿机构使用乐高积木搭建的Trotbot腿机构机器人在国外网站上搜到的大型Trotbot腿机构的机器人第九、Plantigrade腿机构第十、Ghassaei行走机构(4腿)6腿Ghassaei行走机构第十一、Jansen 连杆机构是由Jansen发明的,用于模拟平稳行走,Jansen利用这种连杆制造了著名的海滩巨兽,这种连杆兼具美学价值和技术优势,通过简单的旋转输入就可模仿生物行走运动,这种连杆已经用于行走机器人和步态分析。
图为单个Jansen 连杆机构。
2腿Jansen行走机构4腿Jansen行走机构6腿Jansen行走机构瑟·严森(Theo Jansen)出生于1948年,荷兰动能艺术家。
瑟·严森求学于代尔夫特理工大学物理系,后转为学习绘画。
20世纪80年代因“飞行UFO项目”成名。
20世纪90年代开始“海滩野兽”系列动能艺术项目,在世界各地做展。
严森上世纪70年代毕业于荷兰的代尔夫特理工大学物理系。
那时正值“嬉皮士年代”,深受嬉皮士文化影响的严森开始转行学习艺术。
20世纪80年代末,他开始给一家杂志社写专栏,每天都要尝试用不同的眼光来看待世界,寻找看现实的新颖的角度。
“海滩怪兽”最初就出现在他的笔下。
他构思了这样一个动物,一个能够在海滩上独立生存的简单“生物”。
对于“海滩怪兽”,严森最初的想法是建造一些能够采集沙子,搭建沙丘的机器人,这样,当海平面上升时,这些机器人就可以拯救人类不被海水淹没。
收集的几种连杆机构机器人行走背后的机械原理(一)机器人概念已经红红火火好多年了,目前确实有不少公司已经研制出了性能非常优越的机器人产品,我们比较熟悉的可能就是之前波士顿动力的“大狗”和会空翻的机器人了,还有国产宇树科技的机器狗等,这些机器人动作那么敏捷,背后到底隐藏了什么高科技呢,控制技术太过复杂,一般不太容易了解,不过其中的机械原理倒是相对比较简单,大部分都是一些连杆机构。
连杆机构(Linkage Mechanism)又称低副机构,是机械的组成部分中的一类,指由若干(两个以上)有确定相对运动的构件用低副(转动副或移动副)联接组成的机构。
低副是面接触,耐磨损;加上转动副和移动副的接触表面是圆柱面和平面,制造简便,易于获得较高的制造精度。
由若干刚性构件用低副联接而成的机构称为连杆机构,其特征是有一作平面运动的构件,称为连杆,连杆机构又称为低副机构。
其广泛应用于内燃机、搅拌机、输送机、椭圆仪、机械手爪、牛头刨床、开窗、车门、机器人、折叠伞等。
主要特征连杆机构构件运动形式多样,如可实现转动、摆动、移动和平面或空间复杂运动,从而可用于实现已知运动规律和已知轨迹。
优点:(1)采用低副:面接触、承载大、便于润滑、不易磨损,形状简单、易加工、容易获得较高的制造精度。
(2)改变杆的相对长度,从动件运动规律不同。
(3)两构件之间的接触是靠本身的几何封闭来维系的,它不像凸轮机构有时需利用弹簧等力封闭来保持接触。
(4)连杆曲线丰富,可满足不同要求。
缺点:(1)构件和运动副多,累积误差大、运动精度低、效率低。
(2)产生动载荷(惯性力),且不易平衡,不适合高速。
(3)设计复杂,难以实现精确的轨迹。
百度百科的相关词条图片如下下面我们就看看一般都有什么连杆机构适于用于行走(或者移动)的。
第一、平面四杆机构(Planar four-bar mechanism )平面四杆机构是由四个刚性构件用低副链接组成的,各个运动构件均在同一平面内运动的机构。


本科毕业论文(设计)课题名称垃圾拾捡机器人抓取及行走机构设计学院机械学院专业机械班级名称学生姓名学号内容存在大量删减指导教师↓完成日期有兴趣可以直接拉最下看教务处制1垃圾拾捡机器人抓取及行走机构设计摘要经济在迅速发展增长,人们的物质生活追求也在不断地提高,产生的垃圾排放量正因此有增无减,造成越来越大的环境压力,像是校园、商店、街道这类集中人流的地方,每日都会造成大量的垃圾出现,而为了让这些地方保持清洁又需要投入大量环卫工人的劳动。
假若能设计出垃圾拾捡机器人将会很大程度上缓解上述的状况。
垃圾拾捡机器人系统作为多功能于一体的综合系统,其作用有感知周边环境、进行动态的操作规划、机构的配合控制等等。
其中主要部件的机械手作用有抓取、移动到指定位置等;行走机构作为机械手的脚,能开阔机械手的工作空间,令到机械手能以多方位角度执行任务,相反,机械手自身也在提升移动机器人的操作性能。
关键词垃圾抓取机构;小车行走机构;机器人2ABSTRACT The rapid development of economy makes our materialistic pursuit gradually better, thus waste emissions be on the increase day by day, making more and more pressure on the environment, the densely populated place like campus, shops, street, manufacture large quantities of garbage, it need a large amount of manpower of cleaner and material resources in order to let these places keep clean.To design a garbage robot can ease the current situation.This robot is a set of environment perception, behavior control and execution, dynamic decision-making and planning functions in one integrated system. The role of the main components of mechanical hand is manipulator grasping, move to the specified location; As the base of mechanical hand, moving platform is used to expand the working space of the manipulator, making it perform the task in a more appropriate gesture, the addition of manipulator also greatly enhanced the performance of the mobile robot.KEY WORDS Garbage grabbing mechanism;Walking mechanism;Robot3目录1.绪论 (6)1.1移动机器人概述 (6)1.2全球机器人行业发展现状分析 (6)2. 垃圾拾捡机器人总体方案设计 (7)2.1 垃圾拾捡机器人原理 (7)3.垃圾拾捡机器人行走机构设计 (9)3.1工作原理 (9)3.2方案设计 (10)3.5设计链传动 (11)3.5.1 选择链轮齿数 (11)3.5.2 确定计算功率 (11)3.5.3 选择链条型号和节距 (11)3.6链轮的设计.......................................................................... 错误!未定义书签。


摘要导盲机器人是为视觉障碍者行动提供导航帮助的一种服务机器人,它利用多种传感器对周围环境进行探测,将探测的信息进行处理然后做出相应的反馈提供给驱动装置和视障者,以帮助使用者有效地避开障碍。
世界上视觉障碍者数量众多,而他们只能用60%的感觉来获取经验。
因而设计一款实用的导盲机器人来帮助视觉障碍者是十分必要的。
本文在综述国内外现有导盲辅助工具特点的基础上,确定了导盲机器人的总体方案。
机器人行走机构采用1个万向轮和2个差动轮的轮式结构,在两个差动轮中,有一个是由驱动电机,从而控制车体行进方向,机器人前进的动力由使用者自身提供。
机器人采用西门子S7-200控制,配备射频传感器、红外传感器、超声波传感器等检测环境信息,并具有语音提示功能。
机器人的主体控制思想为BP神经网络算法,基于这种算法,机器人可以选择合适的转动角度,确定最优运动路径。
关键词: 导盲机器人;避障;传感器;BP神经网络算法AbstractAs one of serving robots, The blind guiding robot is a novel device designed to help blind or visually impaired users navigate safely. it detects the environment information by the many kinds of sensors. And it sends the information to the blind and robot, and helps him/her know the environment and avoid the obstacle efficiently.Throughout the world, the number of blind is numerous, and the blind have to use 60% abilities of sensory. Designing a sort of practical blind guiding robot to help thevisual impaired persons has great significance.According to the characters in the blind guiding robot at home and abroad, a portable and reasonable general scheme is designed. The walking mechanism of the robot is the wheel-structure. It has one steering wheel and two universal wheels. and one of universal wheels is driven by the motor. The steering wheel controls the marching direction of the robot. The progressive power of robot is provided by the user. A PLC is used to control the behaviors of the robot. And the robot detects the environment with three types of sensors including Ultrasonic Sensor, Infrared Sensor, and a RFID sensor. The main program of robot is based on BP neural network algorithm, And the robot can select the appropriate rotation angle, to determine the optimal motion path.Key words:The blind guiding robot;Avoiding Obstruction;Sensor;BP neural network algorithm第一章绪论1.1 引言世界卫生组织估计全世界有盲人4000万到4500万,低视力人数是盲人的3倍,约1.4亿人,我国曾在上世纪80年代进行过视力残疾状况调查。
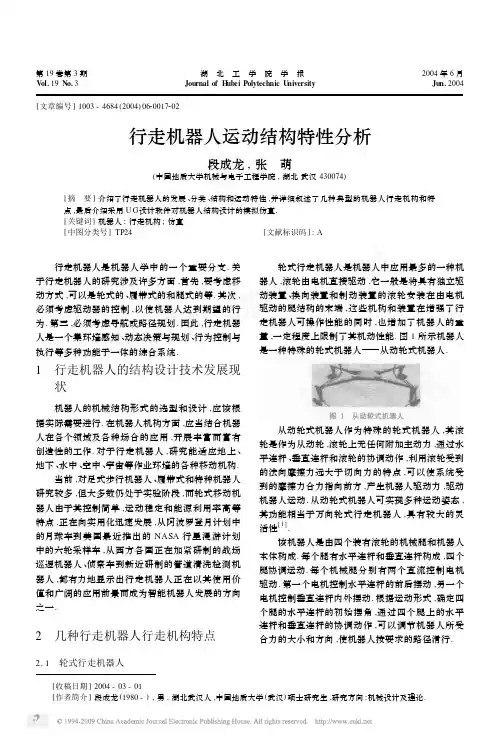
第19卷第3期湖 北 工 学 院 学 报2004年6月V ol.19N o.3 Journal of H ubei Polytechnic U niversity Jun.2004[收稿日期]2004-03-01[作者简介]段成龙(1980-),男,湖北武汉人,中国地质大学(武汉)硕士研究生,研究方向:机械设计及理论.[文章编号]1003-4684(2004)0620017202行走机器人运动结构特性分析段成龙,张 萌(中国地质大学机械与电子工程学院,湖北武汉430074)[摘 要]介绍了行走机器人的发展、分类、结构和运动特性,并详细叙述了几种典型的机器人行走机构和特点,最后介绍采用U G 设计软件对机器人结构设计的模拟仿真.[关键词]机器人;行走机构;仿真[中图分类号]TP24[文献标识码]:A 行走机器人是机器人学中的一个重要分支.关于行走机器人的研究涉及许多方面,首先,要考虑移动方式,可以是轮式的、履带式的和腿式的等.其次,必须考虑驱动器的控制,以使机器人达到期望的行为.第三,必须考虑导航或路径规划.因此,行走机器人是一个集环境感知、动态决策与规划、行为控制与执行等多种功能于一体的综合系统.1 行走机器人的结构设计技术发展现状 机器人的机械结构形式的选型和设计,应该根据实际需要进行.在机器人机构方面,应当结合机器人在各个领域及各种场合的应用,开展丰富而富有创造性的工作.对于行走机器人,研究能适应地上、地下、水中、空中、宇宙等作业环境的各种移动机构.当前,对足式步行机器人、履带式和特种机器人研究较多,但大多数仍处于实验阶段,而轮式移动机器人由于其控制简单,运动稳定和能源利用率高等特点,正在向实用化迅速发展,从阿波罗登月计划中的月球车到美国最近推出的NASA 行星漫游计划中的六轮采样车,从西方各国正在加紧研制的战场巡逻机器人、侦察车到新近研制的管道清洗检测机器人,都有力地显示出行走机器人正在以其使用价值和广阔的应用前景而成为智能机器人发展的方向之一.2 几种行走机器人行走机构特点2.1 轮式行走机器人轮式行走机器人是机器人中应用最多的一种机器人,滚轮由电机直接驱动,它一般是将具有独立驱动装置、换向装置和制动装置的滚轮安装在由电机驱动的腿结构的末端,这些机构和装置在增强了行走机器人可操作性能的同时,也增加了机器人的重量,一定程度上限制了其机动性能.图1所示机器人是一种特殊的轮式机器人从动轮式机器人.从动轮式机器人作为特殊的轮式机器人,其滚轮是作为从动轮,滚轮上无任何附加主动力,通过水平连杆、垂直连杆和滚轮的协调动作,利用滚轮受到的法向摩擦力远大于切向力的特点,可以使系统受到的摩擦力合力指向前方,产生机器人驱动力,驱动机器人运动.从动轮式机器人可实现多种运动姿态,其功能相当于万向轮式行走机器人,具有较大的灵活性[1].该机器人是由四个装有滚轮的机械腿和机器人本体构成.每个腿有水平连杆和垂直连杆构成,四个腿协调运动.每个机械腿分别有两个直流控制电机驱动.第一个电机控制水平连杆的前后摆动,另一个电机控制垂直连杆内外摆动.根据运动形式,确定四个腿的水平连杆的初始摆角,通过四个腿上的水平连杆和垂直连杆的协调动作,可以调节机器人所受合力的大小和方向,使机器人按要求的路径滑行.2.2 履带式行走机器人履带式行走机器人的行走机构支撑面积大,接地比压小,适合于松软或泥泞场地作业,下陷小,滚动阻力小,对路况具有较强的适应性,常见于军用机器人.履带行走方式具有爬坡能力强、承载能力大的特点,因此也常被设计成某些民用机器人.图2所示机器人是一种特殊的履带式机器人四周履带式机器人的履带结构.该机器人采用四周履带驱动,并且多节串连,除可实现一般的直线移动和曲线移动外,还能在爬坡、越障、翻倒、翻滚、严重歪斜以致侧面受阻的状态下继续移动,它的移动状态比较特殊,其一般的曲线和直线移动相对较少,较多的情况则是在侧翻或倾覆状态、机身两面着地或者前后节相互扭转时的移动;在过沟或过台阶的情况下首节抬头越障时的移动.考虑到情况的复杂性,所以借鉴仿生学原理,采用四周履带行走机构,微电机驱动,整机的行走既可协调控制,又可各节单独控制,如整机中的某一节因倾斜而导致侧面受阻时,通过倾斜传感器控制侧面履带工作,从而使各节之间的推拉作用和履带控制转向的灵活性得到充分发挥,在抬头机构的协调作用下实现适应复杂地形的蛇形移动和整机翻滚移动的功能.该移动机器人整机结构采用多节串联构成(一般不少于3节),每一节都可以单独控制并自行移动,其本身又是由几个独立的履带驱动单元构成四周履带驱动机构.整机主要由行走系、传动系、绞接系、抬头系4部分组成.节与节之间采用广义万向节结构相连;首末2节各有一套柔性抬头机构[2].2.3 足式行走机器人根据调查,在地球上近一半的地面不适合于传统的轮式或履带式车辆行走.但是一般多足动物却能在这些地方行动自如,显然足式与轮式及履带式行走方式相比具有独特的优势.足式行走对崎岖路面具有很好的适应能力,足式运动方式的立足点是离散的点,可以在可能到达的地面上选择最优的支撑点,而轮式运载工具必须面临最坏的地形上的几乎所有点.足式运动方式还具有主动隔振能力[3].尽管地面高低不平,机身的运动仍然可以相当平稳.足式行走在不平地面和松软地面上的运动速度较高,能耗较少.足式机器人种类繁多,有单腿跳跃型、四腿移动型、仿生多足爬行类,以及高级的仿人双腿行走型等.3 行走机器人的仿真研究Unigraphics (简称U G )是目前先进的CAD 软件.该软件可以用来模拟各种机器设备的工作、运动状态,从而验证设备结构设计及参数设定的正确性和优化性.将U G 设计软件应用于机器人行走机构设计中,可以对机器人建立三维几何模型,实现可视化的运动过程模拟.同时,运用其本身的模块可进行一般的运动仿真,如将其模型用Parasolid 导入到ADAM 软件,则可进行更加详细和复杂的运动不和动力学分析.[ 参 考 文 献 ][1] 李金良.混合机构式机器人的动力学建模及参数变化[J ].机械科学与技术,2003,6(6):22-24.[2] 江 浩.新型移动机器人的结构设计[J ].应用科技,2002,3(3):56-58.[3] 殷际英.关节型机器人[M ].北京:化工工业出版社,2003.Movement Characteristic Analysis of R obotand Movement EmulationDUAN Cheng 2long ,ZHAN G Meng(Faculty of Mechanical &Elect ronic Engi n.,Chi na U niv.of Geosciences ,W uhan 430074,Chi na )Abstract :The development of the robot and its classification ,structure and movement characteristics are introd 2uled and walking structure of several kinds of typical robots and their characterisistcs are described in detail U G software is applied to the emulation of the fobit structual design K eyw ords :robot ;walking structure ;emulation[责任编辑:张培炼]81湖 北 工 学 院 学 报 2004年第3期 。
机器人行走机构原理机器人行走机构是指用于控制机器人移动和行走的结构和装置。
它是实现机器人在不同环境中自由移动和执行任务的关键部件。
机器人行走机构的设计和原理直接影响着机器人的稳定性、速度、灵活性和适应性。
1. 基本概念在探讨机器人行走机构的原理之前,先来了解一些基本概念:•步态(Gait):指机器人在运动过程中,支撑腿与摆动腿之间的相对运动规律。
不同步态适用于不同环境和任务需求。
•支撑腿(Support Leg):指在行走过程中用于支撑和稳定身体的腿。
•摆动腿(Swing Leg):指在行走过程中用于推进身体向前移动的腿。
•步态周期(Gait Cycle):指完成一次完整步态所需要的时间。
•步幅(Stride Length):指每一步前进的距离。
2. 行走方式2.1. 轮式行走轮式行走是最常见且简单的行走方式之一。
它使用轮子作为机器人的运动部件,通过控制轮子的转动来实现机器人的行走。
轮式行走机构可以分为两种类型:差速驱动和全向驱动。
2.1.1. 差速驱动差速驱动是指通过控制左右两侧轮子的转速差异来实现机器人的转弯和定位。
当左右两侧轮子转速相等时,机器人直线行走;当两侧轮子转速不等时,机器人会产生转向力矩,从而实现转弯。
差速驱动的优点是结构简单、成本低廉,适用于平坦且无障碍物的环境。
然而,它在不同地面上的摩擦力变化较大时容易出现滑移现象,并且在越野或不平坦地形上表现较差。
2.1.2. 全向驱动全向驱动是指通过控制多个轮子(通常是三个或四个)以不同方向和速度旋转来实现机器人的任意方向移动。
全向驱动可以通过组合直线运动和旋转运动来实现复杂路径的行走。
全向驱动的优点是机器人具有更好的机动性和灵活性,能够在狭窄空间中进行精确移动和定位。
然而,全向驱动的结构复杂、成本较高,并且对地面摩擦力要求较高。
2.2. 腿式行走腿式行走是模仿生物行走方式的一种机器人行走方式。
它使用类似于生物的腿部结构来实现机器人的行走。
机械创新设计课程设计题目:六足式机器人的行走机构设计小组成员:班级:指导教师:成绩:1六足是机器人的行走机构设计目录摘要 (4)第一章绪论 (1)1.1. 六足仿生机器人的概念: (1)1.2.课题来源 (2)1.3.设计目的 (2)1.4.技术要求 (2)1.5.设计意义 (2)1.6.设计范围 (3)1.7.国内外的发展状况和存在的问题 (3)1.7.1.国外发展状况 (3)1.7.2.国内发展状况 (4)1.7.3.存在的问题 (5)1.8.具体设计 (5)1.8.1.设计指导思想 (5)1.8.2.应解决的主要问题 (5)1.8.3.本设计采用的研究计算方法 (6)1.8.4.技术路线 (6)第二章六足仿生机器人的步态规划 (7)2.1步态分类 (7)2.1.1 三角步态 (7)2.1.2跟导步态 (7)2.1.3交替步态 (7)2.2步态规划概述 (8)2.3六足仿生机器人的坐标含义 (9)2.4 三角步态的稳定性分析 (12)2.4.1 稳定性分析 (12)2.4.2稳定裕量的计算 (12)2.5三角步态行走步态设计 (13)2.5.1直线行走步态规划 (13)2.5.2转弯步态分析 (15)2.6六足机器人的步长设计 (15)2国际机械设计制造及其自动化专业课程设计(论文)2.7六足机器人着地点的优化 (16)第三章六足机器人的机构分析 (18)3.1四连杆机构的设计 (18)3.1.1理论根据与机构选择 (18)3.2设计参数 (21)3.3步行腿机构系统 (21)3.4 舵机驱动原理 (22)3.4.1驱动原理 (22)3.4.2 舵机控制方法 (22)3.5 六足机器人主体设计 (24)3.5.1 机身 (24)3.5.2腿部的设计 (25)3.5.3足 (25)3.5.4小腿 (26)3.5.5大腿 (27)第四章总结 (28)4.1.设计小结 (28)4.2设计感受 (28)4.3课程设计见解 (28)参考文献 (29)谢辞 (30)3六足是机器人的行走机构设计摘要人类社会的发展,各种各样的机器人正渐渐的走进我们的视野,有很多的地方都用到了机器人,在机器人的领域里越来越多的人开始爱好上了机器人。
四足步行机器人行走机构设计毕业设计篇一:四足步行机器人腿的机构设计毕业论文毕业设计(论文)四足步行机器人腿的机构设计学生姓名:学号:所在系部:专业班级:指导教师:日期:摘要本文介绍了国内外四足步行机器人的发展状况和三维制图软件SolidWorks的应用,着重分析了设计思想并对行走方式进行了设计并在此软件基础上四足步行机器人腿进行了绘制,对已绘制的零部件进行了装配和三维展示。
展示了SolidWorks强大的三维制图和分析功能。
同时结合模仿四足动物形态展示出了本次设计。
对设计的四足行走机器人腿进行了详细的分析与总结得出了该机构的优缺点。
本文对四足机器人腿的单腿结构分析比较详细,并结合三维进行理性的理解。
关键词:SolidWorks;足步行机器人腿AbstractIn this paper, fouth inside and outside the two-legged walking robot and the development of three-dimensional mapping of the application of SolidWorks software, focused on an analysis of designconcepts and approach to the design of walking and (原文来自:小草范文网:四足步行机器人行走机构设计毕业设计)the basis of this software quadruped walking robot legs have been drawn on components have been drawn to the assembly and three-dimensional display. SolidWorks demonstrated a strong three-dimensional mapping and analysis functions. At the same time, combined with four-legged animal patterns to imitate the design show. The design of four-legged walking robot legs to carry out a detailed analysis and arrive at a summary of the advantages and disadvantages of the institution. In this paper, four single-legged robot more detailed structural analysis, combined with a rational understanding of three-dimensional.Keywords: SolidWorks; four-legged walking robot 目录摘要 ................................................ ................................................... . (I)Abstract .......................................... ................................................... (II)1 绪论 ................................................ ................................................... .. (1)1.1 步行机器人的概述 ................................................ .. (1)1.2 步行机器人研发现状 ................................................ . (1)1.3 存在的问题 ................................................ .. (5)2 四足机器人腿的研究 ................................................ .. (6)2.1 腿的对比分析 ................................................ . (6)2.1.1 开环关节连杆机构 ................................................ (6)2.1.2 闭环平面四杆机构 ................................................ . (9)2.2 腿的设计 ................................................ (11)2.2.1 腿的机构分析 ................................................ (12)2.2.2 支撑与摆动组合协调控制器 ................................................ . (18)2.3 单条腿尺寸优化 ................................................ . (21)2.3.1 数学建模 ................................................ .. (21)2.3.2 运动特征的分析 ................................................ .. (23)2.4 机器人腿足端的轨迹和运动分析 ................................................ . (24)2.4.1 机器人腿足端的轨迹分析 ................................................ .. (24)2.4.2 机器人腿足端的运动分析 ................................................ .. (27)3 机体设计................................................. ................................................... . (30)3.1 机体设计 ................................................ (30)3.1.1 机体外壳设计 ................................................ (30)3.1.2 传动系统设计 ................................................ (31)3.2 利用Solid Works进行腿及整个机构辅助设计 (35)4 结论 ................................................ ................................................... (36)4.1 论文完成的主要工作 ................................................ .. (36)4.2 总结 ................................................ ................................................... .. 36参考文献 ................................................ ................................................... .. (37)致谢 ................................................ ................................................... (39)1 绪论1.1 步行机器人的概述机器人相关的研发和应用现如今早已变成每个国家的重要科研项目之一,通过运用机器人来代替人们的某些危险工作或者帮助残疾人完成自己所不能完成的事情。
机器人行走结构的类型及特点一、移动机器人行走机构概述机器人行走机构按照其运动轨迹可分为固定式轨迹和无固定式轨迹两种。
固定式轨迹主要用于工业机器人,它是对人类手臂动作和功能的模拟和扩展;无固定轨迹就是指具有移动功能的移动机器人,它是对人类行走功能的模拟和扩展。
移动机器人的行走结构形式主要有:车轮式移动结构;履带式移动结构;步行式移动结构。
此外,还有步进式移动结构、蠕动式移动结构、混合式移动结构和蛇行式移动结构等,适合于各种特别的场合。
从移动机器人所处环境看,可以分为结构环境和非结构环境两类。
结构环境:移动环境是在轨道上(一维)和铺好的道路(二维)。
在这种场合,就能利用车轮移动结构。
非结构环境:陆上二维、三维环境;海上、海中环境;空中宇宙环境等原有的自然环境。
陆上建筑物的阶梯、电梯、间隙沟等。
在这样的非结构环境领域,可参考自然界动物的移动机构,也可以利用人们开发履带,驱动器。
例如:2足、4足、6足及多足等步行结构。
行走结构的设计对于移动机器人的工作效率有着至关重要的作用,选择适当、精巧的行走结构往往可以大大提高机器人的动作效率。
这就需要我们熟悉和了解不同机器人行走结构的类型及特点。
二、三种常见的行走结构1)车轮式移动结构两车轮:像自行车只有两个车轮的结构。
两车轮的速度、倾斜等物理量精度不高,因此进行机器人化,所需便宜、简单、可靠性高的传感器难以获得。
此外,两轮车制动时以及低速运行时也极不稳定。
三轮车:三轮移动结构是车轮式机器人的基本移动结构,其结构是后轮用两轮独立驱动,前轮用小脚轮构成组合。
这种结构的特点是结构组成简单,而且旋转半径可以从0到无限大,任意设定。
但是他的旋转中心是在连接两驱动轴的连线上,所以旋转半径即使是0,旋转中心也与车体的中心不一致。
四轮车:四轮车的驱动结构和运动基本上和三轮车相同。
和汽车一样,适合于高速行走,稳定性也好。
一般情况下,车轮式行走结构最适合平地行走,不能跨越高度,不能爬楼梯。
机器人行走结构的类型及特点
一、移动机器人行走机构概述
机器人行走机构按照其运动轨迹可分为固定式轨迹和无固定式轨迹两种。
固定式轨迹主要用于工业机器人,它是对人类手臂动作和功能的模拟和扩展;无固定轨迹就是指具有移动功能的移动机器人,它是对人类行走功能的模拟和扩展。
移动机器人的行走结构形式主要有:车轮式移动结构;履带式移动结构;步行式移动结构。
此外,还有步进式移动结构、蠕动式移动结构、混合式移动结构和蛇行式移动结构等,适合于各种特别的场合。
从移动机器人所处环境看,可以分为结构环境和非结构环境两类。
结构环境:移动环境是在轨道上(一维)和铺好的道路(二维)。
在这种场合,就能利用车轮移动结构。
非结构环境:陆上二维、三维环境;海上、海中环境;空中宇宙环境等原有的自然环境。
陆上建筑物的阶梯、电梯、间隙沟等。
在这样的非结构环境领域,可参考自然界动物的移动机构,也可以利用人们开发履带,驱动器。
例如:2足、4足、6足及多足等步行结构。
行走结构的设计对于移动机器人的工作效率有着至关重要的作用,选择适当、精巧的行走结构往往可以大大提高机器人的动作效率。
这就需要我们熟悉和了解不同机器人行走结构的类型及特点。
二、三种常见的行走结构
1)车轮式移动结构
两车轮:像自行车只有两个车轮的结构。
两车轮的速度、倾斜等物理量精度不高,因此进行机器人化,所需便宜、简单、可靠性高的传感器难以获得。
此外,两轮车制动时以及低速运行时也极不稳定。
三轮车:三轮移动结构是车轮式机器人的基本移动结构,其结构是后轮用两轮独立驱动,前轮用小脚轮构成组合。
这种结构的特点是结构组成简单,而且旋转半径可以从0到无限大,任意设定。
但是他的旋转中心是在连接两驱动轴的连线上,所以旋转半径即使是0,旋转中心也与车体的中心不一致。
四轮车:四轮车的驱动结构和
运动基本上和三轮车相同。
和
汽车一样,适合于高速行走,
稳定性也好。
一般情况下,车轮式行走结构
最适合平地行走,不能跨越高
度,不能爬楼梯。
但现今也出
现特殊的轮式结构。
全方位移动车:在平面上移动的物
体可以实现前后、左右和自转3 个
自由度的运动.但如汽车等,可以前进、拐弯而不能横向移动就不是. 若具有完全的3 个自由
度,则称为全方位移动机器人,它非常适合工作在空间狭窄有限、对机器人的机动性要求高的场合中.国外很多研究机构开展了全方位移动机器人的
上下台阶车轮式结构:将普通的车轮进行适当的改装后,能够实现在阶梯上移动。
不平地移动的多车节车轮式机构:
2)履带式移动结构
履带式结构称为无限轨道方式,其最大特点是将园环状的无限轨道履带卷绕在多个车轮上,使车轮不直接与路面接触。
利用履带可以缓冲路面状态,因此可以在各种路面条件下行走。
与车轮式移动结构相比,有如下特点:
a)支承面积大,接地比压小。
适合松软或泥泞场地作业,下陷度小,滚动阻力小,
通过性能好;
b)越野机动性能好,爬坡、越沟等性能均优于车轮式移动结构
c)履带支承面上有履齿,不易打滑,牵引性能好,有利于发挥较大的牵引力
d)结构复杂,重量大,运动惯性大,减震性能差,零件易损害
这里介绍一种较特殊的履带结构
形状可变履带结构:它是指履带的构形可以根据需要进行变化的结构。
这种结构一
般由两条形状可变的履带组成,分别由两个主电机驱动。
当两个履带速度相同时,
实现前进或后退移动,当速度不同时,整个机器实现转向移动。
3)步行式移动机构
步行机器人与轮式机器人相比较最大的优点就是步行机器人对行走路
面的要求很低,不仅能在平地上,而且能在凹凸不平的地上步行,能跨越沟
壑,上下台阶,用于工程探险勘测或军事侦察等人类无法完成的或危险的工
作;也可开发成娱乐机器人玩具或家用服务机器人,具有广泛的适应性。
主
要设计难点是机器人跨步时自动转移重心而保持平衡的问题。
控制特点:使
机器人的重心经常在接地的脚掌上,一边不断取得准静态平衡,一边稳定的
步行。
结构特点:为了能变换方向和上下台阶,一定要具备多自由度。
的,具有很高的实用性。
四足机器人步行时,一只脚抬起,三只脚支撑自重,这时有必要移动身体,让重心落在三只脚接地点组成的三角形内。
三、其他行走结构
爬壁机器人:近年来,由于工业生产对特殊功能机器人的
需求越来越大,爬壁机器人的研究备受关注。
有的可以吸附在各种大型构造物如油罐、球形煤气罐、船
舶等的壁面,代替人进行检查或修理等作业。
这种爬壁机
器人靠磁性车轮对壁面产生吸附力,其主要特征是:行走
稳定速度快,最大速度可达9m/min,适用各种形状的壁
面,且不损坏壁面的油漆。
我国的哈尔滨工业大学已经成功研制出单吸盘真空
吸附车轮行走式爬壁机器人和永磁铁吸附履带爬壁机器
人。
其中磁吸附履带式爬壁机器人采用的是双履带永磁吸
附结构,在履带一周上安装有数十个永磁吸附块,其中的
一部分紧紧地吸附在壁面上,并形成一定的吸附力,通过履带(由链条和永磁块组成)使机器人贴附在壁面上。
机器人在壁面上的移动靠履带来完成,移动时,履带的旋转使最后的吸附块在脱离壁面的同时又使上面的一个吸附块吸附于壁面,这样周而复始,就实现了机器人在壁面上的爬行。
管道内外移动:如图,可以看出移动主要是靠
两个轮子,但每个车轮两边还有一对撑架,用来帮助
车轮在管道外移动时站立而不倒,并可以增加车轮与
管道壁之间的摩擦,从而获得较大的移动力。
这种结
构可用于检修核管道和煤气主干道等一些容易引发
危害的大型管道。
四、结论
机器人的行走结构就是机器人的脚,选择一双好脚就能事半功倍,因此在选择机器人的行走结构时,我们一定要充分的考虑各个方面,不断的调试,最后才能到达理想的效果。
参考资料:
[1] 丁学恭.机器人控制研究.杭州:浙江大学出版社,2006.9
[2] 周新伦,关绮玲.机器人.上海:复旦大学出版社,1994
[3] 周兰.机器人机身及行走机构.ppt文件
[4] 付文瀚.上下楼机器人设计。