第十五章结构力学(十四)
- 格式:docx
- 大小:859.15 KB
- 文档页数:6
【最新整理,下载后即可编辑】§13-4 连续梁的整体刚度矩阵即传统位移法:根据每个结点位移对附加约束上的约束力{F}的贡献大小进行叠加而计算所得。
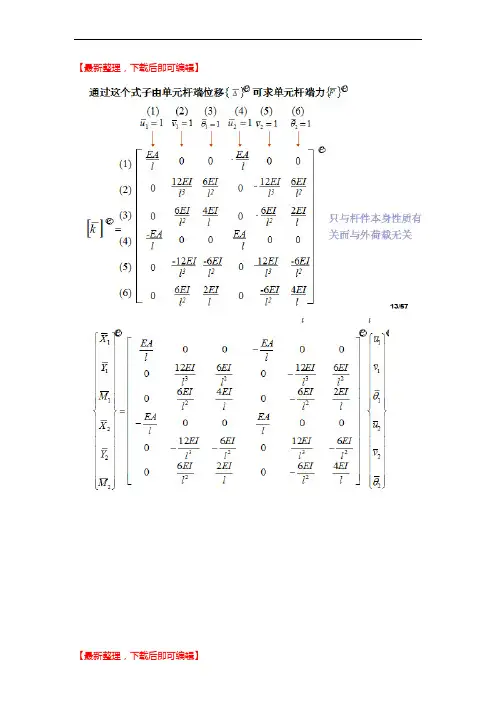
一、单元集成法的力学模型和基本概念1.首先只考虑于是其中由前面的单元刚度矩阵所得,则进一步得到所以最终得到2.则这是最后总结如下的形式来作最终的计算§13-5 刚架的整体刚度矩阵思路要点:(1)设各单元已形成了整体坐标系下的单元刚度矩阵;与连续梁相比: (1)各单元考虑轴向变形;(2)每个刚结点有三个位移; (3)要采用整体坐标;(4)要处理非刚结点的特殊情况。
一、结点位移分量的统一编码——总码整体结构的结点位移向量为:相应地结点力向量为:规定:对于已知为零的结点位移分量,其总码均编为零。
其中每个单元的刚度为以下其中定位向量为:最终进行叠加求得整体刚度矩阵代入数字得定位向量:§13-6 等效结点荷载结构体系刚度方程:{F}= [K]{∆} (1)表示结点位移{∆}和结点力{F}之间的关系,反映了结构的刚度性质,而不涉及原结构上作用的实际荷载,并不是原结构的位移法基本方程。
一、位移法基本方程} ={0} (2)[K]{∆} +{FP用图来表达以上思想:二、 等效结点荷载的概念显然 {P }= –{F P }………解决了计算等效结点荷载的问题 等效原则是两种荷载在基本体系中产生相同的结点约束力 三、按单元集成法求整体结构的等效结点荷载{P } (1)局部坐标单元的等效结点荷载(2)整体坐标单元的等效结点荷载(3) 结构的等效结点荷载{P }{}[]{}P T P T=依次将每个单元等效结点荷载中的元素按照单元定位向量在结构的等效结点荷载中定位叠加。
§13-7 计算步骤和算例1 确定整体和局部坐标系、单元和结点位移编码2 形成刚度矩阵(1)形成局部坐标系下的单元刚度矩阵(2)形成整体坐标系下的单元刚度矩阵(3)“换码重排座”,形成整体结构的刚度矩阵3 形成等效结点荷载(1)形成局部坐标系下的单元固端力(2)形成整体坐标系下的单元等效结点荷载(3) “换码重排座”,形成整体结构的等效结点荷载4 解整体刚度方程,求结点位移5 求各单元的杆端内力(1)整体坐标系下的单元杆端位移(2)局部坐标系下的单元杆端位移(3)局部坐标系下的单元杆端内力§13-8 忽略轴向变形时矩形刚架的整体分析14 超静定结构总论§14-1 超静定结构解法的分类和比较超静定结构计算方法分类各种结构型式所选用的适宜解法说明:手算时,凡是多余约束多、结点位移少的结构用位移法;反之用力法。
第四部分超静定结构内力计算
一、超静定结构基本特征
超静定结构的所有反力和内力仅由静力平衡条件不能决定(静力特征)超静定结构是有多余约束的几何不变体系(几何特征)
未知力数大于自立静力平衡方程数,满意平衡方程的解答不唯一。
超静定结构的普通性质
1. 超静定内力与刚度有关
荷载作用——刚度相对值
非荷载因素——刚度绝对值
改变刚度普通将引起内力重分布
有特例
2. 超静定结构可能产生自内力——与刚度的绝对值成正比温度影响
有特例
3. 整体性好、刚度大、防御能力强、内力匀称
4. 超静定结构内力求解基本原则:
平衡条件
几何条件
物理条件
求解主意:力法 位移法 力矩分配法
二、力法
以多余未知力为进本未知量
1. 基本思路
2. 力法要点
挑选力法基本未知量、力法基本结构,建立力法基本体系
或
基本体系 基本体系
3. 建立力法基本方程——变形协调条件
变形协调条件
4. 超静定次数及力法基本体系
超静定次数=多余约束个数
=变原结构为静定结构所需撤多余约束数
=撤所有多余约束所裸露多余约束力数
注重:须要约束不能撤
多余约束要所有撤除
多余约束的挑选不是唯一的
注重:基本结构不能是几何可变(常变、瞬变)体系。