动力学方程 拉格朗日方程
- 格式:ppt
- 大小:426.00 KB
- 文档页数:22
拉格朗日动力学方程
拉格朗日动力学(1agrangianDynamics)是一种以势能作为基础的动力学理论,由拉格朗日在18th世纪末提出。
它利用势能和动能,即动量及系统内部动量来描述物理系统的运动。
动力学方程中表达的是系统在特定时刻的状态,它是以物体的位置和速度为变量描述物理系统状态的。
拉格朗日动力学方程是物理系统总动量保守定理的衍生形式,它表示了系统动量的变化规律,是阐明动量守恒原理的有力证明。
它可以表达为:
d1∕dt=F o
其中,d1/dt表示系统的总动量,F表示系统的外力。
拉格朗日动力学方程是物理系统之间相互作用以及物体受到外力影响的动力学的表征。
它的推导不仅展示了动量的守恒,而且它的结构可以作为理解物理系统状态及物体运动的抽象框架。
第一类拉格朗日动力学方程第一类拉格朗日动力学方程是描述质点在保守力场中运动的动力学方程,也称为拉格朗日方程。
它可以通过最小作用量原理导出。
设一个质点在平面上的位置用广义坐标q和q'表示,其中q为广义坐标,q'为广义速度。
质点在这个保守力场中的运动可以由拉格朗日函数L(q,q')描述,其表达式为:L(q,q') = T(q,q') - V(q)其中,T(q,q')为质点的动能,V(q)为保守力场中的势能。
根据最小作用量原理,质点的运动路径满足满足驻定作用量条件,即质点在一个时间间隔内的作用量的变分为零。
作用量S的表达式为:S = ∫(t1,t2) L(q,q') dt其中t1和t2为起始和终止时间。
为了推导第一类拉格朗日动力学方程,我们采用变分法。
首先,在时间间隔[t1,t2]上作用量的变分为:δS = ∫(t1,t2) (δL(q,q')/δq)δq dt + ∫(t1,t2) (δL(q,q')/δq')δq' dt使用分部积分法将第二项中的变分δq'转化为对广义坐标q的变分,得到:δS = ∫(t1,t2) [(∂L/∂q - d/dt(∂L/∂q'))δq] dt + [∂L/∂q'δq]在t1到t2的两端值由于作用量的变分为零,所以第二项在起始和终止时间的两个端点为零,即:[∂L/∂q'δq]在t1到t2的两端值 = 0因此,驻定作用量条件可以写成:∫(t1,t2) [(∂L/∂q - d/dt(∂L/∂q'))δq] dt = 0由于δq的任意性,可以得出:∂L/∂q - d/dt(∂L/∂q') = 0这就是第一类拉格朗日动力学方程。
它描述了质点在保守力场中运动的规律,通过求解这个方程,我们可以得到质点的运动轨迹。
拉格朗日方程式拉格朗日方程式________________________________拉格朗日方程式(Lagrange equation)是物理学中的一个重要概念,主要描述了摩擦力学系统中的动力学特性。
它也是物理学中一个很重要的数学工具,常用于解决简单和复杂力学系统中的力学问题。
它可以用来计算物体在受到外力作用时的动力学行为,从而对物体的运动进行分析和预测。
#### 一、拉格朗日方程式的定义拉格朗日方程式是一种数学方程,它可以用来描述物体在外力作用下的动力学行为。
它的基本形式是:\begin{equation}m\ddot x=F_{ext}-F_{int}\end{equation}其中,$x$是物体的位置向量,$m$是物体的质量,$F_{ext}$是物体受到的外力,$F_{int}$是物体内部受到的内力。
#### 二、拉格朗日方程式的应用拉格朗日方程式在物理学中有广泛的应用,常用于解决各种复杂的力学问题。
例如,在求解物体在受到外力作用时的运动轨迹、求解物体在受到外力作用时的运动规律等问题中,都可以使用拉格朗日方程式来解决。
此外,它还可以用来求解物体在受到外力作用时的运动轨迹、求解物体在受到外力作用时的能量变化、求解物体在受到外力作用时的内部应力等问题。
#### 三、拉格朗日方程式的推导在求解拉格朗日方程式之前,我们需要先了解一些基本概念。
例如,我们需要了解物体受到外力作用时所发生的力学过程,以及物体在这个过程中所受到的力和应力。
具体来说,我们需要了解物体在受到外力作用时所发生的力学过程,以及物体在这个过程中所受到的各种外力和内部应力。
然后,我们就可以使用牛顿定律和能量守恒定律来推导拉格朗日方程式。
依据牛顿定律,我们可以得到:\begin{equation}m\ddot x=F_{ext}-F_{int}\end{equation}而依据能量守恒定律,我们可以得到:\begin{equation}\frac{dK}{dt}+\frac{dU}{dt}=0\end{equation}其中,$K$是物体的动能,$U$是物体的位能。
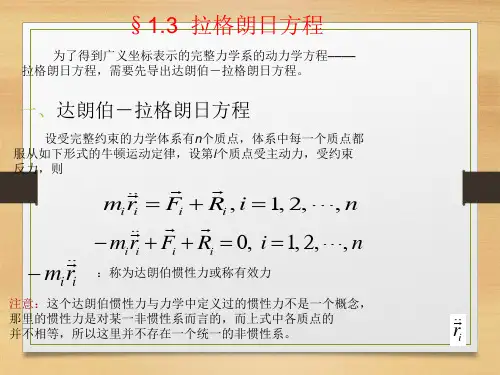
定义:拉格朗日方程,因约瑟夫·路易斯·拉格朗日而命名,是拉格朗日力学的主要方程,可以用来描述物体的运动,特别适用于理论物理的研究。
拉格朗日方程的功能相等于牛顿力学中的牛顿第二定律。
拉格朗日方程:对于完整系统用广义坐标表示的动力方程,通常系指第二类拉格朗日方程,是法国数学家J.-L.拉格朗日首先导出的。
通常可写成:式中T为系统用各广义坐标qj和各广义速度q'j所表示的动能;Qj为对应于qj 的广义力;N(=3n-k)为这完整系统的自由度;n为系统的质点数;k为完整约束方程个数。
从虚位移原理可以得到受理想约束的质点系不含约束力的平衡方程,而动静法(达朗贝尔原理)则将列写平衡方程的静力学方法应用于建立质点系的动力学方程,将这两者结合起来,便可得到不含约束力的质点系动力学方程,这就是动力学普遍方程。
而拉格朗日方程则是动力学普遍方程在广义坐标下的具体表现形式。
拉格朗日方程可以用来建立不含约束力的动力学方程,也可以用来在给定系统运动规律的情况下求解作用在系统上的主动力。
如果要想求约束力,可以将拉格朗日方程与动静法或动量定理(或质心运动定理)联用。
通常,我们将牛顿定律及建立在此基础上的力学理论称为牛顿力学(也称矢量力学),将拉格朗日方程及建立在此基础上的理论称为拉格朗日力学。
拉格朗日力学通过位形空间描述力学系统的运动,它适合于研究受约束质点系的运动。
拉格朗日力学在解决微幅振动问题和刚体动力学的一些问题的过程中起了重要的作用。
拉格朗日插值公式(外文名Lagrange interpolation formula)指的是在节点上给出节点基函数,然后做基函数的线性组合,组合系数为节点函数值的一种插值多项式。
公式线性插值也叫两点插值,已知函数y = f(x)在给定互异点x0, x1上的值为y0= f(x0),y1= f(x1)线性插值就是构造一个一次多项式P1(x) = ax + b使它满足条件P1(x0) = y0P1(x1) = y1其几何解释就是一条直线,通过已知点A (x0, y0),B(x1, y1)。