机器人机构学-绪论
- 格式:ppt
- 大小:2.03 MB
- 文档页数:54
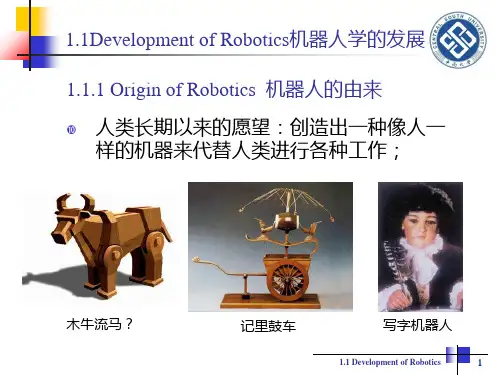

智能机器人系统绪论主讲人:郑志强国防科技大学智能科学学院机器人“制造业皇冠顶端的明珠”机器人“制造业皇冠顶端的明珠”由于大数据、云计算、移动互联网等新一代信息技术同机器人技术相互融合步伐加快,3D打印、人工智能迅猛发展,制造机器人的软硬件技术日趋成熟……军用无人机、自动驾驶汽车、家政服务机器人已经成为现实,有的人工智能机器人已具有相当程度的自主思维和学习能力……我就在想,我国将成为机器人的最大市场…….我们要审时度势、全盘考虑、抓紧谋划、扎实推进。
——习主席在2014年两院院士大会上的讲话机器人的定义机器人是一个可计算机编程的机器,能够自动地执行一系列复杂的动作。
机器人可通过外部控制设备或者内嵌的控制系统导引。
机器人可能按照人类的模样构建,但是大多数机器人是设计来执行特定任务的机器,而不考虑其模样。
机器人的定义A robot is a machine—especially one programmable bya computer—capable of carrying out a complex series ofactions automatically.Robots can be guided by an external control device or the control may be embedded within.Robots may be constructed to take on human form butmost robots are machines designed to perform a task with no regard to how they look.https:///wiki/Robot机器人的实例机器人可以是自主的、半自主的、遥控的。
机器人包括类人机器人、工业机器人、服务机器人、医疗机器人、娱乐机器人、康复机器人、群体机器人、无人机、无人车、无人艇、微纳米机器人……机器人的实例类人机器人焊接机器人四足仿生机器人机器人的实例手术机器人拟人机器人阿西莫夫-机器人三法则机器人不能伤害人类,或坐视人类受到伤害而袖手旁观除非违背第一法则,机器人必须服从人类的命令在不违背第一和第二法则前提下,机器人必须保护自己阿西莫夫-机器人三法则阿西莫夫提出的“机器人三原则”为机器人规定了伦理性纲领,一直是机器人科学家研究开发工作的准则。
第一章绪论1.1 什么是工业机器人1.2 为何发展工业机器人1.3 工业机器人发展概况1.3.1 工业机器人的诞生1.3.2 工业机器人的发展1.4 工业机器人的分类及应用1.4.1 工业机器人的分类1.4.2 工业机器人的应用学习目标*掌握工业机器人的定义*了解工业机器人的发展事由和历程*熟悉工业机器人的常见分类及其行业应用导入案例富士康“百万机器人”上岗折射中国制造业升级2011 年,富士康 CEO 郭台铭表示,希望到 2012 年底装配 30 万台机器人,到2014 年装配 100 万台,要在 5 到 10 年数年内通过自动化消除简单重复性的工序。
机器人的投产使用,可将目前的人力资源转移到具备更高附加值的岗位上,这也符合将我国“人口红利”转为“人才红利”的大目标。
这一工业机器人的井喷潮涌,何时会蔓延到“中国制造”的每一个工厂、每一条生产线、每一个工序、每一个工位上,将为“中国制造”的转型提“智”做出何等贡献?我们对此充满期待。
课堂认知1.1 什么是工业机器人机器人涉及到人的概念,成为一个难以回答的哲学问题。
美国:一种用于移动各种材料、零件、工具或专用装置的,通过程序动作来执行种种任务的,并具有编程能力的多功能操作机。
日本: 一种带有存储器件和末端操作器的通用机械,它能够通过自动化的动作替代人类劳动。
中国: 一种自动化的机器,所不同的是这种机器具备一些与人或者生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器。
ISO一种能自动控制,可重复编程,多功能、多自由度的操作机,能搬运材料、工件或操持工具来完成各种作业。
广义地说:工业机器人是一种在计算机控制下的可编程的自动机器。
它具有四个基本特征:①特定的机械机构②通用性③不同程度的智能④独立性1.2 为何发展机器人让机器人替人类干那些人不愿干、干不了、干不好的工作。
ABB 给出十大投资机器人的理由:第一,降低运营成本;第二,提升产品质量与一致性;第三,改善员工的工作环境;第四,扩大产能;第五,增强生产的柔性;第六,减少原料浪费,提高成品率;第七,满足安全法规,改善生产安全条件;第八,减少人员流动,缓解招聘技术工人的压力;第九,降低投资成本,提高生产效率;最后一点,节约宝贵的生产空间。
机器人机构学-绪论引言机器人机构学是一门研究机器人结构和运动学的学科。
随着人工智能和自动化技术的快速发展,机器人在工业生产、医疗保健、军事应用等领域得到越来越广泛的应用。
机器人机构学的研究可以帮助我们理解机器人的结构特点和运动规律,进而设计出更加灵活、高效的机器人系统。
机器人机构的定义机器人机构是指构成机器人的各个部件之间的连接关系,包括机身、传动系统、关节、传感器等。
机器人机构的设计对机器人的性能、可靠性和适应性等方面的影响极大。
机器人机构的分类根据机器人机构的结构和运动特点,可以将其分为以下几类:1.串联机构:由一系列关节连接而成,每个关节只有一个自由度。
典型的串联机构包括人的手臂和腿等。
2.并联机构:由多个并联的关节组成,每个关节都有自由度。
并联机构具有较高的刚度和精度,常用于需要快速准确定位的任务。
3.混合机构:由串联机构和并联机构的组合构成,兼具串联机构的灵活性和并联机构的刚度。
4.柔性机构:通过柔性材料的变形实现机器人的运动。
柔性机构具有较好的适应性和承载能力,适用于狭小空间和不规则环境的工作。
机器人运动学机器人运动学研究机器人的位置、姿态和运动规律。
根据运动学理论,可以通过给定机器人关节的角度、长度和位置等参数,计算机器人末端执行器的位置和姿态。
机器人运动学分为正运动学和逆运动学两个方面:正运动学正运动学是指已知机器人关节的运动参数,推导出机器人末端执行器的位置和姿态的过程。
通过正运动学,可以确定机器人在空间中的准确位置,具有重要的实际应用价值。
逆运动学逆运动学是指已知机器人末端执行器的位置和姿态,计算机器人关节的运动参数。
逆运动学是机器人控制的核心问题之一,解决逆运动学可以实现机器人的自主控制和路径规划。
机器人机构学的应用机器人机构学的研究成果广泛应用于各个领域。
以下是机器人机构学的几个典型应用:1.工业机器人:工业机器人广泛应用于生产线上的重复性、高精度任务,如焊接、装配和搬运等。
机器人技术基础复习要点第一章:绪论1.机器人分类:按开发内容与应用分为工业机器人,操纵型机器人,智能机器人;按发展程度分为第一代,第二代和第三代机器人;按性能指标分为超大型,大型。
中型。
小型和超小型机器人;按结构形式分为直角坐标型机器人,圆柱坐标型机器人,球坐标型机器人和关节坐标型机器人;按控制方式分为点位控制和连续轨迹控制;按驱动方式分为气力驱动式,液力驱动式和电力驱动式。
按机座可动分类分为固定式和移动式。
2.机器人的组成:驱动系统,机械系统,感知系统,控制系统,机器人-环境交互系统,人机交互系统。
3.机器人的技术参数:自由度:是指机器人所具有的独立坐标轴的数目;精度:主要依存于机械误差,控制算法误差与分辨率系统误差;重复定位精度;是关于精度的统计数据;工作范围:指的是机器人手臂末端或手腕中心所能达到的所有店的集合;最大工作速度:不同厂家定义不同,通常在技术参数中加以说明;承载能力:指的是机器人在工作范围内的任何位姿上所能承受的最大质量。
第二章:机器人本体结构1.机器人本体基本结构:传动部件,机身及行走机构,臂部,腕部,手部。
2.机器人本体材料的选择:强度高,弹性模量大,质量轻,阻尼大,经济性好。
3.机身设计要注意的问题:刚度和强度大;动灵活,导套不宜过短,避免卡死;驱动方式适宜;结构布置合理。
4.臂部的基本形式:机器人的手臂由大臂,小臂所组成,手臂的驱动方式主要有液压驱动,气动驱动和电动驱动几种形式,其中电动驱动最为通用;臂部的典型机构有臂部伸缩机构,手臂俯仰运动机构,手臂回转与升降机构。
5.臂部设计需要的注意的问题:足够的承载能力;刚度高;导向性能好,运动迅速,灵活,平稳,定位精度高;重量轻,转动惯性小;合理设计与腕部和机身的连接部位。
6.机器人的平稳性和臂杆平衡方法:机身和臂部的运动较多,质量较大,如果运动速度和负载游较大,当运动状态变化时,将产生冲击和振动。
这将仅影响机器人的精确定位,甚至会使其不能正常运转。
工业机器人技术及应用(教案)1-绪论一、背景介绍随着科技的不断发展,机器人技术已经广泛应用于工业生产、医疗卫生、军事防卫、探险勘探、教育娱乐等领域。
其中,工业机器人是机器人技术的重要应用领域之一,逐渐成为了传统工业生产的代表。
工业机器人可以帮助生产企业提高生产效率、缩短生产周期、降低生产成本,应用前景非常广阔。
二、教学目标1.熟悉工业机器人的定义、分类和特点。
2.了解工业机器人的工作原理和基本结构。
3.掌握工业机器人的编程和控制方法。
4.学习工业机器人的应用领域和前景。
三、教学内容3.1 工业机器人的定义、分类和特点3.1.1 定义工业机器人是一种能够代替人工完成一系列工业生产任务的具有一定自主能力的现代化设备系统。
3.1.2 分类•按控制方式分类:自动化控制机器人和计算机控制机器人。
•按使用范围分类:坐标运动机器人和自由运动机器人。
•按控制点数分类:点位控制机器人、直线控制机器人和轨迹控制机器人。
•按特殊功能分类:喷涂机器人、焊接机器人、搬运机器人、装配机器人等。
3.1.3 特点•根据不同的工程任务可以进行编程和处理。
•可以实现多重动作,并按照指定的工艺程序工作。
•具有高精度、高重复性和高柔性等特点。
3.2 工业机器人的工作原理和基本结构3.2.1 工作原理工业机器人的工作原理是:•通过机械手臂的移动、旋转和伸缩等运动,将物体从一个位置转移到另一个位置。
•通过机械手臂上的末端执行器,对物体进行加工或者其他处理。
3.2.2 基本结构工业机器人的基本结构是:•机械臂:用来进行物体的搬运、加工等操作。
•控制器:通过对机械臂的控制,实现机械臂的动作。
•编程装置:通过编程,控制机器人的动作。
3.3 工业机器人的编程和控制方法3.3.1 编程方法•离线编程:将机器人的动作指令通过计算机编程,将编好的程序传输到机器人控制器中,从而操控机械臂执行动作。
•在线编程:直接在机械手臂上编程。
3.3.2 控制方法•点位控制法:将机器人手臂移动到指定的位置上。
河南工程学院《机器人技术基础》考查课专业论文工业机器人结构设计学生姓名:肖慧慧学院:机械工程学院专业班级:机制1321专业课程:机器人技术基础任课教师:***2014年12月25 日工业机器人结构设计摘要机器人是一种由三个自由度组成的平面关节型机器人,它的主要作用是可以完成精密仪器和物体的搬运和移动。
由于体积小,传动原理简单,被广泛运用于电子电气业,家用电器业,精密机械业等领域。
整个系统由机器手,机器臂,关节,步进电机驱动系统等组成。
通过各自由度步进电机的驱动,完成机器手,机器臂的位置变化。
具体设计内容为:同步齿形带传动设计,丝杠螺母设计,各输出轴和壳体的设计,步进电机的选择等。
在校核满足其结构强度的基础上,我们对机器人的结构进行优化设计。
关键词:机器人,结构设计,机器臂Industrial Robot Structure DesignABSTRACTRobot is a robot of plane and joint composed of three degrees of freedom. Its mostly function is used to complete transition and motion of exact apparatuses and objects. Because of its small volume and simple drive principle, it is widely used in the field of electronic and electric industry, home-used electric-ware industry and exact mechanism. The whole system is composed of manipulator hand, manipulator arm, joints and stepper motor driving system. By stepper motor’s driving of each degree of freedom, it completes location change of manipulator hand and manipulator arm. The idiographic designing content is designing of in-phase tooth-shape strap, designing of silk-bar nut, designing of shell and axis and the choice of stepper motors. On the base of checking its structure intensity, while it satisfied, we optimize designing of the structure of Robots.Key Words: Robots, Structure Design, Manipulator Arm.一、绪论1.1 前言工业机械手是近代自动控制领域中出现的一项新技术,并已成为现代机械制造生产系统中的一个重要组成部分,这种新技术发展很快,逐渐成为一门新兴的学科——机械手工程。