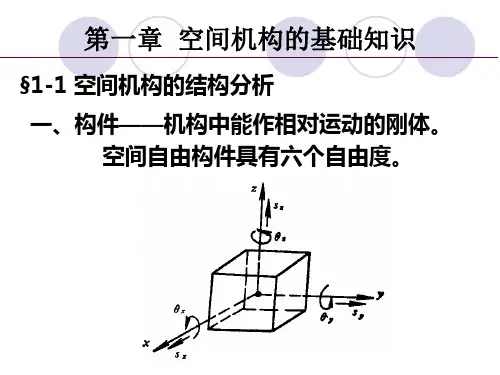
机构学和机器人学4空间机构的运动分析
- 格式:ppt
- 大小:662.00 KB
- 文档页数:35
全方位移动机构的运动分析---开题报告近年来,随着移动机器人和相关技术的发展,使得移动机构在很多行业的应用逐渐深入和拓宽。
如具有全方位移动机构的火星探路者机器人、金字塔探秘移动机器人、移动机器人吸尘器、踢足球的移动机器人等。
移动机构是移动机器人运动的基础。
根据移动特性,可以分为非全方位和全方位移动机构两种。
在平面上移动的物体可以实现前后、左右和自转3个自由度的运动;若所具有的自由度少于3个,则为非全方位移动机构。
典型产品如汽车等,可以前进、拐弯而不能横向移动。
若具有完全的3个自由度,则为全方位移动机构。
全方位机构非常适合工作在空间狭窄有限、对机构的机动性要求高的场合中。
国外很多研究机构开展了全方位移动机器人的研制工作。
在车轮设计制造、机器人上轮子的配置方案、以及全方位机构的运动学分析等方面进行了广泛的研究,形成了许多具有不同特色的全方位移动机构产品。
国内虽然在移动机器人上的研究开展了一段时间,但是全方位的移动机器人还仅局限于几种固有的形式。
第一部分通过对全方位移动机构的结构特点和运动特性进行分析,为今后全方位移动机构的设计提供参考。
第二部分介绍移动机构的运动学分析介绍,第三部分介绍以自由轮系构成的移动机构,第四部分介绍以偏心转向轮构成的系。
全方位移动机构的运动学分析介绍假设移动机构具有刚性外壳,不变形的轮子,运动局限在平面上,则机构在平面上的位置可以由图1 表示。
平面世界坐标系定义为xOy ,点P为在机构本体上的参考点,车体坐标系为XPY ,则机构的位置和姿态可以由ξ= (x,y,θ)t表示,其中(x,y)为点P在平面世界坐标系中的位置, θ为世界坐标系下x轴到机构坐标系X轴的角度,逆时针为正。
用点P来代表移动机构,若能在平面世界坐标系下实现( x,y,θ)三个自由度的运动,则称其为全方位移动机构。
自由方向轮系1.Swedish轮Swedish轮也称Mecanum轮,由轮辐和固定在外周的许多小滚子构成,轮子和滚子之间的夹角为γ,通常夹角γ为45°,如图2所示。
1. 概述机构运动分析包括位置分析、速度分析和加速度分析三部分。
其中,位置分析是运动分析最基本的任务,也是机构速度、加速度以及受力分析、误差分析、工作空间分析、动力分析和机构综合等的基础。
机构的位置解有封闭解法(closed-form solution)和数值解法(numerical approach)。
2. 机构的工作空间分析机器人工作空间是机器人操作器的工作区域,其大小是衡量机器人性能的重要指标,分为可达工作空间和灵活工作空间。
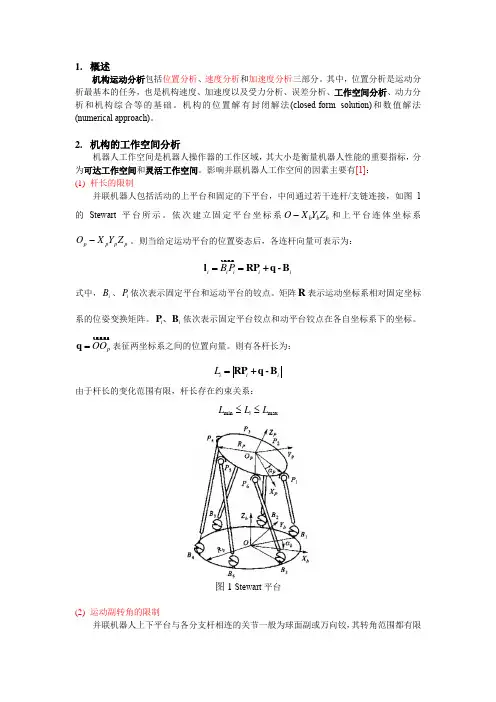
影响并联机器人工作空间的因素主要有[1]:(1) 杆长的限制并联机器人包括活动的上平台和固定的下平台,中间通过若干连杆/支链连接,如图1的Stewart 平台所示。
依次建立固定平台坐标系b b b O X Y Z -和上平台连体坐标系p p p p O X Y Z -。
则当给定运动平台的位置姿态后,各连杆向量可表示为:i i i i i B P ==l RP +q -B式中,i B 、i P 依次表示固定平台和运动平台的铰点。
矩阵R 表示运动坐标系相对固定坐标系的位姿变换矩阵。
i i P B 、依次表示固定平台铰点和动平台铰点在各自坐标系下的坐标。
p OO =q 表征两坐标系之间的位置向量。
则有各杆长为:i i i L =RP +q -B由于杆长的变化范围有限,杆长存在约束关系:min max i L L L ≤≤图1 Stewart 平台(2) 运动副转角的限制并联机器人上下平台与各分支杆相连的关节一般为球面副或万向铰,其转角范围都有限制。
图2显示关节转角约束: 球面副:max ()arccos i pi Pi P i θθ⋅=≤l Rn l 万向铰:max ()arccos i bi bi b iθθ⋅=≤l Rn l图2 关节的转角约束(3) 连杆的干涉《高等空间机构学》P162 (3种情况,空间两线段的距离)【空间两向量叉积的模等于由此两向量组成的平行四边形的面积,图3】图3 向量叉积参考文献:[1] Masory O, Wang J, Zhuang H. On the accuracy of a Stewart platform. II. Kinematic calibrationand compensation[C]//Robotics and Automation, 1993. Proceedings., 1993 IEEE International Conference on. IEEE, 1993: 725-731.。
机构与机械传动知识点总结一、机构概念及分类机构是实现某种特定运动要求或传递动力、转动力的元件组成系统。
机构可分为平面机构和空间机构。
平面机构是由相互连接的刚性物体组成,构成一个平面框架,用于改变平面内一个物体的运动状态。
而空间机构则是由连接的刚性物体组成,构成三维空间中的框架,用以改变空间内一个物体的运动状态。
二、机构运动分析机构的运动分析是研究机构元件在作相对运动时,这些相对运动的大小、方向和速度的关系,进而确定各个链件上的参数和点上的运动规律。
机构运动分析中的关键问题是构件的相对位置和来定向关系、原动件与从动件之间传递运动参数的关系。
1. 机构的图解图分析机构的图解是利用逐点图解的方法,把机构的各种运动传动关系用图形方式表示出来的过程。
2. 机构的位置分析机构的位置分析是指确定机构有且仅有一个稳定的工作姿态。
位置分析的关键是将机构元件的相对位置用运动参数表示出来。
3. 机构的速度分析速度分析是指确定机构各个部件的运动速度。
速度分析时,可以将链速度与各凸轮器件上点的速度分解为切矢方向和截矢方向上的速度。
4. 机构的加速度分析机构加速度分析侧重于确定机构各个部件的加速度。
在加速度分析中,最重要的是识别相对位移函数的二阶导数以确定加速度。
三、机械传动概念及分类机械传动是指通过机械装置来传递或转换动力和运动的过程。
根据传递的力的特性和运动轴线位置的方向,机械传动可分为顺合传动和交叉传动。
顺合传动是指输入轴和输出轴的方向一致,而交叉传动则是指输入和输出轴的方向不一致。
四、机械传动的组成部分1. 传动机构传动机构是指通过传动装置来实现力的传递和转换的系统。
传动机构的主要组成元件包括齿轮、链条、带传动等。
2. 联接件联接件是机械传动系统中用于连接传动机构的部件,包括轴、螺纹副、销轴、键等。
3. 动力元件动力元件是指机械传动系统中用来提供动力的元件,包括电动机、内燃机等。
4. 传动环境传动环境是指机械传动系统工作的环境条件,包括传动系统的温度、湿度、气压等。
课程考试复习题及参考答案机器人学导论一、名词解释题:1.自由度:2.机器人工作载荷:3.柔性手:4.制动器失效抱闸:5.机器人运动学:6.机器人动力学:7.虚功原理:8.PWM驱动:9.电机无自转:10.直流伺服电机的调节特性:11.直流伺服电机的调速精度:12.PID控制:13.压电元件:14.图像锐化:15.隶属函数:16.BP网络:17.脱机编程:18.AUV:二、简答题:1.机器人学主要包含哪些研究内容?2.机器人常用的机身和臂部的配置型式有哪些?3.拉格朗日运动方程式的一般表示形式与各变量含义?4.机器人控制系统的基本单元有哪些?5.直流电机的额定值有哪些?6.常见的机器人外部传感器有哪些?7.简述脉冲回波式超声波传感器的工作原理。
8.机器人视觉的硬件系统由哪些部分组成?9.为什么要做图像的预处理?机器视觉常用的预处理步骤有哪些?10.请简述模糊控制器的组成及各组成部分的用途。
11.从描述操作命令的角度看,机器人编程语言可分为哪几类?12.仿人机器人的关键技术有哪些?三、论述题:1.试论述机器人技术的发展趋势。
2.试论述精度、重复精度与分辨率之间的关系。
3.试论述轮式行走机构和足式行走机构的特点和各自适用的场合。
4.试论述机器人静力学、动力学、运动学的关系。
5.机器人单关节伺服控制中,位置反馈增益和速度反馈增益是如何确定的?6.试论述工业机器人的应用准则。
四、计算题:(需写出计算步骤,无计算步骤不能得分):1.已知点u的坐标为[7,3,2]T,对点u依次进行如下的变换:(1)绕z轴旋转90°得到点v;(2)绕y轴旋转90°得到点w;(3)沿x轴平移4个单位,再沿y轴平移-3个单位,最后沿z轴平移7个单位得到点t。
求u, v, w, t各点的齐次坐标。
xyzOuvwt2.如图所示为具有三个旋转关节的3R 机械手,求末端机械手在基坐标系{x 0,y 0}下的运动学方程。
并联机器人的运动学分析一、引言机器人技术作为现代工业生产的重要组成部分,已经在汽车制造、电子设备组装、医疗器械等领域发挥着重要作用。
而在机器人技术中,并联机器人以其独特的结构和运动方式备受关注。
本文将对并联机器人的运动学进行深入分析,探讨其工作原理及应用前景。
二、并联机器人的运动学模型并联机器人由多个执行机构组成,这些执行机构通过联接杆件与运动基座相连,使机器人具有多自由度运动能力。
为了对并联机器人的运动学进行建模,我们需要确定每个执行机构的运动关系。
其中,分析最为常用的是基于四杆机构的并联机器人。
1. 四杆机构的运动学模型四杆机构是一种由两个连杆和两个摇杆组成的机构,通过这些部件的相对运动实现机构的运动。
在并联机器人中,常见的四杆机构包括平行型、等长型等。
以平行型四杆机构为例,我们可以将其简化为平面结构,并通过设定适当的坐标系进行建模。
在平行型四杆机构中,设两个连杆为L1和L2,两个摇杆为L3和L4。
定义坐标系,以机构的连杆转轴为原点,建立运动坐标系OXYZ。
假设L3的转角为θ3,L4的转角为θ4,连杆L1和L2的长度分别为L1和L2,则可以通过几何关系得到机构的运动学方程。
2. 并联机器人的运动学模型并联机器人由多个四杆机构组成,各个四杆机构之间通过杆件连接,使得整个机器人能够实现更复杂的运动。
以三自由度的并联机器人为例,每个四杆机构的连杆长度、摇杆转角都有一定的自由度限制。
通过对每个四杆机构的运动学模型进行分析,可以得到整个并联机器人的运动学方程。
三、并联机器人的动力学分析除了运动学分析,动力学分析也是对并联机器人进行研究的重要方向。
动力学分析包括对并联机器人在运动过程中的力矩、加速度等动力学参数的研究,是实现机器人精确控制和安全运行的基础。
1. 动力学模型的建立在并联机器人的动力学分析中,我们通常采用拉格朗日方法建立动力学数学模型。
通过拉格朗日方程可以建立机器人运动学和动力学之间的联系,从而实现对机器人运动过程中各个关节力矩的估算。
空间机构学与机器人设计方法空间机构学与机器人设计方法是现代工程技术领域中极具前瞻性的研究方向。
在这篇文章中,我们将深入探讨这一领域的核心概念、设计方法及其在实际应用中的重要性。
一、空间机构学概述空间机构学是研究空间运动机构的设计、分析与优化的一门学科。
它以数学、力学、计算机科学等多学科为基础,旨在为工程实践提供精确的空间运动解决方案。
空间机构在航空航天、机器人技术、精密仪器等领域具有广泛的应用。
二、机器人设计方法1.机器人设计基本原理机器人设计方法包括机械结构设计、控制系统设计、传感器与执行器选型等方面。
在设计过程中,需充分考虑机器人的功能需求、工作环境、性能指标等因素。
2.空间机构在机器人设计中的应用空间机构在机器人设计中的应用主要体现在以下几个方面:(1)提高机器人运动灵活性:空间机构可以实现多自由度、多轴心的运动,使机器人具备更广泛的工作空间和更高的运动灵活性。
(2)优化机器人动力学性能:空间机构具有良好的力传递特性,有助于提高机器人的负载能力和运动平稳性。
(3)减小机器人体积和重量:空间机构的设计可以实现紧凑的结构布局,降低机器人的体积和重量,提高其携带和搬运的便利性。
三、空间机构学与机器人设计方法的实际应用1.航空航天领域:空间机构学在航空航天领域的应用包括卫星天线展开机构、空间站对接机构等,这些机构的设计与优化对航天任务的顺利进行具有重要意义。
2.工业机器人:在工业生产中,空间机构学为机器人的运动轨迹规划、负载能力提升等方面提供了理论支持,提高了生产效率和产品质量。
3.医疗机器人:空间机构学在医疗机器人领域的应用包括手术机器人、康复机器人等,为患者提供更加精确、安全的医疗服务。
4.仿生机器人:空间机构学在仿生机器人领域的研究,如蛇形机器人、四足机器人等,为机器人适应复杂环境提供了新的设计思路。
四、总结空间机构学与机器人设计方法是现代工程技术领域的重要研究方向,它们在各个领域的应用不断拓展,为我国科技创新和产业发展提供了有力支持。
机器人结构及其运动学分析近年来,随着科技的飞速发展,机器人的出现为人类的生产和生活带来了巨大的变革。
在各种机器人中,工业机器人是其中最为常见的一种,其具有高效、快速、精准等特点,被广泛应用于各种生产领域。
而机器人的运动控制是机器人技术中极为重要的一环,而要想进行运动控制,就需要对机器人的结构和运动规律进行详细的分析和研究。
一、机器人结构机器人的结构是机器人控制的基础,机器人的结构通常是由基础结构、执行机构、感知机构、运动控制系统四部分组成。
1. 基础结构机器人的基础结构是机器人整体的支撑框架。
它具有一定的稳定性和刚性,可以确保机器人在各种工作状态下均能稳定运作。
基础结构的形状可以是圆柱形、球形、盒状等,根据机器人的各种功能和要求来设计。
2. 执行机构执行机构是机器人的臂架和手臂结构,也是直接进行任务的主要部分。
机器人臂架的长度、张角、工作空间等都是根据不同的任务设计的。
而手臂结构通常是根据不同的工具或手端进行设计,它可以通过旋转或弯曲等动作完成各种复杂的工作。
3. 感知机构感知机构是机器人的一种传感器,可以通过各种传感器实现机器人对环境和任务对象的感知和识别。
例如,光学传感器、声音传感器、温度传感器、力传感器等都是机器人中常见的感知机构。
4. 运动控制系统运动控制系统是机器人的核心部分,它可以实现机器人各种动作的控制和协调。
这个系统通常包括硬件和软件两个部分,硬件是指各种传感器、执行机构等设备,而软件则是指运动控制的程序和算法等。
二、机器人运动学分析机器人的运动学是机器人技术中不可或缺部分,它主要研究机器人的运动方程、姿态控制、轨迹规划等,具体分为正运动学和逆运动学两个方面。
1. 正运动学机器人的正运动学是根据机器人的运动规律和各个运动参数来确定机器人末端执行机构在笛卡尔坐标系下的位置。
根据数学公式可以得出正运动学方程,只需要知道机器人臂架和手臂的长度、深度、角度等参数就可以通过正运动学解算得到末端执行机构的位置。
机构运动分析范文1.机构的结构分析:机构的结构可以分为平面机构和空间机构两种类型。
平面机构中的各个刚体和铰链位于同一水平面内;而空间机构则不受这样的限制。
机构的结构分析主要是确定机构的自由度,即机构的独立运动个数。
2.机构的运动转换:机构可以通过各种连接件实现运动转换,将输入运动转化为其中一种特定的输出运动。
运动转换可以通过传动比、速度比和加速度比等参数来描述。
通过运动转换的分析,可以确定机构中各个刚体的运动规律。
3.驱动力分析:在机构运动分析中,需要对驱动力进行分析。
驱动力是指施加在机构上的力或力矩,用于推动机构的运动。
在分析中,需要对驱动力的大小、方向和作用点进行计算和确定。
4.运动学分析:机构的运动学分析主要包括位置、速度和加速度三个方面。
通过运用运动学原理和方法,可以确定机构中各个刚体的位置、速度和加速度,并建立起它们之间的关系。
5.动力学分析:机构的动力学分析研究机构在受到各种外部力作用下的运动规律。
通过应用牛顿力学原理,可以得到机构中各个刚体的动力学方程,并进一步求解得到刚体的运动状态。
机构运动分析在工程设计和机械制造领域具有重要的应用。
通过对机构的运动分析,可以确定机器人、汽车发动机等复杂机械系统的运动规律,为系统的设计和优化提供依据。
此外,机构运动分析还可以用于机械振动、机械传动和机械控制等领域的研究。
在进行机构运动分析时,需要运用刚体力学、运动学和动力学等力学原理和方法。
通过建立机构的几何模型和运动方程,可以解决机构运动分析中的各种问题,并获得机构运动的准确描述。
总结起来,机构运动分析是力学中的重要内容,主要包括机构的结构分析、运动转换、驱动力分析、运动学分析和动力学分析。
通过机构运动分析,可以确定机构的运动规律,为机械设计和制造提供理论基础和指导。
同时,机构运动分析也具有重要的应用价值,可以用于机械工程、机器人、车辆工程等领域的研究和应用。