机器人机构
- 格式:pdf
- 大小:1.51 MB
- 文档页数:34
机器人机构设计与优化一、引言随着科技的飞速发展,机器人已经成为现代社会中不可或缺的一部分。
机器人的广泛应用涵盖了各个领域,包括工业生产、医疗护理、农业种植等。
机器人的工作效率和准确性对于提高生产力和人类生活质量具有重要意义。
而机器人的机构设计与优化是实现高效工作的关键。
二、机器人机构设计的原则机器人机构设计的目标是根据特定的任务需求,设计出适合的机械结构。
在机构设计时需要考虑以下原则:1. 功能性:机器人的机构必须能够完成其预定的工作任务。
设计师需要根据任务需求确定机器人所需要的动作范围、工作速度和负载能力等参数。
例如,在工业生产领域中,机器人需要能够快速准确地操作和搬运物体。
2. 稳定性:机器人工作时应保持良好的稳定性以避免不必要的震动和摆动。
稳定性可以通过合理选择机械结构和电子控制系统来实现。
例如,在机器人的关节处使用稳定的轴承可以提高机器人的稳定性。
3. 灵活性:机器人需要具备较高的灵活性以应对不同的工作环境和任务需求。
机器人的机构设计应尽量简化,以便于自由度的变换。
例如,在农业领域中,机器人需要具备适应不同地形和作业需求的能力。
4. 可靠性:机器人的机构应该能够在长期的工作中保持稳定可靠的性能。
设计时应考虑机械结构的强度和使用材料的耐久性。
例如,在医疗护理领域中,机器人的机构需要具备适应各种碰撞和压力的能力。
5. 经济性:机器人的机构设计还应考虑成本和效益的平衡。
设计师需要在提高机器人性能的同时,考虑到成本控制。
例如,在工业生产中,要尽可能减少机器人的制造成本以提高经济效益。
三、机器人机构设计的方法机器人机构设计的方法主要包括传统设计方法和优化设计方法。
1. 传统设计方法:传统的机器人机构设计方法是基于经验和直觉进行的。
设计师根据自己的知识和经验,选择合适的机械结构和参数。
这种方法适用于简单的机构设计,但在复杂问题上存在一定局限性。
2. 优化设计方法:优化设计方法是利用数学模型和计算机仿真来实现机器人机构设计的最佳化。
机器人行走机构分类一、简介机器人行走机构是指用于实现机器人行走功能的机械结构。
机器人的行走机构种类繁多,根据不同的应用需求和环境条件,可以选择合适的行走机构来满足机器人的运动要求。
本文将对常见的机器人行走机构进行分类介绍。
二、轮式行走机构轮式行走机构是最常见的机器人行走机构之一,其特点是结构简单、易于控制和稳定性较高。
轮式行走机构通常由两个或多个轮子组成,通过电机驱动轮子旋转,从而实现机器人的行走。
轮式行走机构适用于平坦的地面,并且能够快速移动。
三、履带式行走机构履带式行走机构采用履带来实现机器人的行走,其特点是具有较好的通过性和抓地力。
履带式行走机构通常由一条或多条履带组成,通过电机驱动履带的运动,从而实现机器人的行走。
履带式行走机构适用于复杂的地形和恶劣的环境条件,能够克服一些障碍物。
四、足式行走机构足式行走机构模仿了生物的步态,通过仿生设计实现机器人的行走。
足式行走机构通常由多个关节和连接件组成,通过电机驱动关节的运动,从而实现机器人的行走。
足式行走机构具有较好的灵活性和适应性,能够适应不同的地形和环境条件。
五、腿式行走机构腿式行走机构是一种特殊的行走机构,其特点是具有较好的稳定性和适应性。
腿式行走机构通常由多个腿部组成,通过电机驱动腿部的运动,从而实现机器人的行走。
腿式行走机构适用于复杂的地形和狭窄的空间,能够克服一些障碍物。
六、轮腿混合式行走机构轮腿混合式行走机构是将轮式行走机构和腿式行走机构结合起来的一种行走机构。
轮腿混合式行走机构通常由轮子和腿部组成,通过电机驱动轮子和腿部的运动,从而实现机器人的行走。
轮腿混合式行走机构综合了轮式行走机构和腿式行走机构的优点,能够在不同的地形和环境条件下灵活行走。
七、其他行走机构除了上述介绍的常见行走机构外,还有一些其他特殊的行走机构,如链式行走机构、球形行走机构等。
这些行走机构通常被应用于特定的领域和特殊的环境条件,具有一些特殊的优势。
八、总结机器人行走机构是机器人的重要组成部分,不同的行走机构适用于不同的应用场景。
移动机器人的机构与分类分析一、移动机器人的机构一般而言,移动机器人的移动机构主要有轮式移动机构、履带式移动机构及足式移动机构,此外还有步进式移动机构、蠕动式移动机构、蛇行式移动机构和混合式移动机构,以适应不同的工作环境和场合。
一般室内移动机器人通常采用轮式移动机构,室外移动机器人为了适应野外环境的需要,多采用履带式移动机构。
一些仿生机器人,通常模仿某种生物运动方式而采用相应的移动机构,如机器蛇采用蛇行式移动机构,机器鱼则采用尾鳍推进式移动机构。
其中轮式的效率最高,但适应性能力相对较差;而足式的移动适应能力最强,但其效率最低。
1 轮式移动机构轮式移动机器人是移动机器人中应用最多的一种机器人,在相对平坦的地面上,用轮式移动方式是相当优越的。
轮式移动机构根据车轮的多少有1轮、2轮、3轮、4轮及多轮机构。
1轮及2轮移动机构在实现上的障碍主要是稳定性问题,实际应用的轮式移动机构多采用3轮和4轮。
3轮移动机构一般是一个前轮,两个后轮。
其中,两个后轮独立动,前轮是万向轮,只起支撑作用,靠后轮的转速差实现转向。
4轮移动机构应用最为广泛,4轮机构可采用不同的方式实现驱动和转向,既可以使用后轮分散驱动,也可以用连杆机构实现4轮同步转向,这种方式比起仅有前轮转向的车辆可实现更小的转弯半径。
2 足式移动机构履带式移动机构虽在高低不平的地面上可以运动,但是它的适应性不够好,行走时晃动较大,在软地面上行驶时效率低。
根据调查,地球上近一半的地面不适合传统的轮式或履带式车辆行走,但是一般的多足动物却能在这些地方行动自如,显然,足式移动机构在这样的环境下有独特的优势。
足式移动机构对崎岖路面具有很好的适应能力,足式运动方式的立足点是离散的点,可以在可能到达的地面上选择最优的支撑点,而轮式和履带式移动机构必须面临最坏地形上的。
机器人机构设计的一般流程Designing a robot mechanism typically involves several key steps. First, the designers must clearly define the purpose and function of the robot. This includes understanding the specific tasks the robot will perform, the environment it will operate in, and any safety requirements that must be met. The purpose of the robot is crucial as it dictates the design parameters and constraints that the engineers must work within.机器人机构设计通常涉及几个关键步骤。
首先,设计师必须明确定义机器人的目的和功能。
这包括了解机器人将执行的具体任务、其将操作的环境以及必须满足的任何安全要求。
机器人的目的至关重要,因为它决定了工程师必须在其中工作的设计参数和约束。
Once the purpose of the robot is established, the next step is to consider the overall architecture of the robot mechanism. This involves conceptualizing the basic structure of the robot, including the number and types of joints, the range of motion required, and any specific features or tools that must be integrated. Thearchitecture phase is crucial as it sets the foundation for the more detailed design work that follows.确定机器人的目的之后,下一步是考虑机器人机构的整体架构。
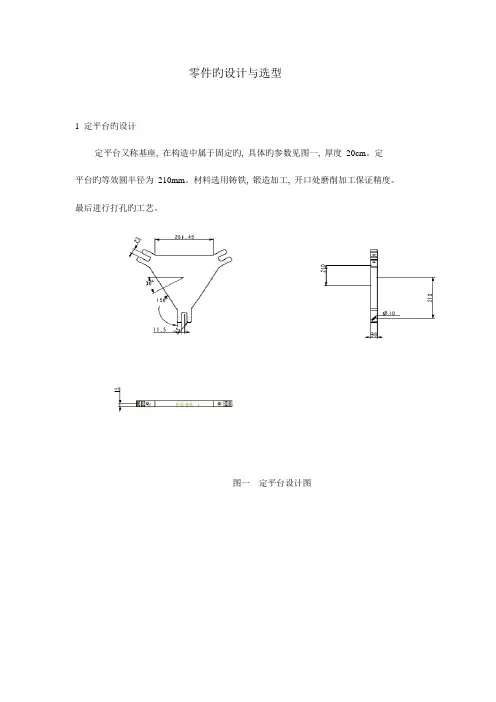
零件旳设计与选型1 定平台旳设计定平台又称基座, 在构造中属于固定旳, 具体旳参数见图一, 厚度20cm。
定平台旳等效圆半径为210mm。
材料选用铸铁, 锻造加工, 开口处磨削加工保证精度。
最后进行打孔旳工艺。
图一定平台设计图2 驱动杆旳设计具体参数为长* 厚* 宽: 880mm*10mm*20mm。
孔旳参数为φ10*10mm。
材料用铝合金, 设计为杆式, 质量小, 经济, 同步也满足载荷条件。
图二驱动杆旳设计图3 从动杆旳设计具体参数为长* 宽* 高: 620*20*10mm。
孔参数为φ10*10mm。
材料选用铝合金。
图三从动杆旳设计图4 动平台旳设计参数如下图, 考虑到重量因素, 采用铝合金, 切削加工。
动平台旳等效圆半径为50mm, 分布角为21.5°。
图四动平台旳设计图5 链接销旳设计45号钢, 为积极杆和定平台旳连接销: φ9*66mm。
6 球铰链旳选型目前, 大多数旳Delta机构旳积极杆与从动杆旳链接方式为球铰链旳链接。
球型连接铰链是用于自动控制中旳执行器与调节机构旳连接附件。
它采用了球型轴承构造具有控制灵活、精确、扭转角度大旳长处, 由于该铰链安装、调节以便、安全可靠。
因此, 它广泛地应用在电力、石油化工、冶金、矿山、轻纺等工业旳自动控制系统中。
球铰链由于选用了球型轴承构造, 能灵活旳承受来自各异面旳压力。
本文选用球铰链设计, 是重要由于球铰链旳可控性, 以及构造简朴, 易于装配。
且有较好旳可维护性。
本文选用了伯纳德旳SD 系列球铰链, 相对运动角为60°。
7 垫圈旳选型此处我们选用原则件。
GB/T 97.1 10‐140HV , 10.5*1.6mm。
8 电机旳选型本设计旳Delta 机器人, 重要面向工业中轻载旳场合, 例如封装饼干等。
因此, 如下做电动机旳选型解决。
由于需要对角度旳精确控制, 因此决定选用伺服电机。
交流伺服电机有如下特点: 启动转矩大, 运营范畴广, 无自转现象, 正常运转旳伺服电动机, 只要失去控制电压, 电机立即停止运转, 这也是Delta 机构需要旳。
智能机器人的机构设计与控制随着智能科技和机器人技术的飞速发展,智能机器人已经成为了出现在我们生活的一个新的热点。
智能机器人的应用领域越来越广泛,机器人的机构设计与控制也变得更加复杂和精密。
在本文中,我们将重点探讨智能机器人的机构设计与控制。
一、智能机器人的机构设计机构设计是指为了实现机器人某项动作或完成特定任务而安排的部件、结构、布局、材料以及加工技术等综合设计。
智能机器人的机构设计需要兼顾多种因素,如机器人要完成的任务、使用环境、工作负载、自主学习算法和传感器技术等。
下面我们将详细探讨智能机器人机构设计的四个方面。
1. 机械结构设计机械结构设计是智能机器人机构设计的重要部分,它应建立在机器人的使用环境和工作负载基础上。
例如,如果机器人要在恶劣的工作环境中工作,机械结构就需要考虑防水、防尘、抗震、抗磨损等性能。
2. 机电集成设计机电集成设计是智能机器人机构设计中不可缺少的一部分,也是智能机器人实现物理任务的基础。
机电集成设计通过直接连接机器人的力和动力传递,将机器人各部件紧密耦合起来,实现机器人的高效稳定运动。
3. 传感器布置设计传感器布置设计是智能机器人机构设计中的重要环节,传感器技术对机器人的智能化程度至关重要。
有了传感器,机器人可以感知周围环境和带有标记的物体,自行构建地图、规划路径和实现精准抓取等任务。
4. 智能算法优化设计智能算法优化设计是智能机器人机构设计中的高级环节,它将人工智能与机器人设计结合,通过自主学习和全面数据分析,为机器人提供先进、高效的智能算法。
这些算法可以在不断的实际应用中进行优化。
二、智能机器人的控制系统设计机器人的控制系统是实现机器人智能化和自主化的重要手段,它负责监视、控制机器人的各类行为和功能,实现人机交互、互联互通。
智能机器人的控制系统设计应涉及到机器人的各项行动,如移动、抓取、搬运、组装等。
1. 控制策略设计控制策略设计是机器人控制系统设计的基础环节,也是机器人智能控制的重要部分。
机器人机构课程设计一、课程目标知识目标:1. 学生能够理解并描述机器人机构的基本组成、功能和原理;2. 学生能够掌握机器人机构的分类、运动特点及应用场景;3. 学生能够了解机器人机构在我国科技发展中的地位和作用。
技能目标:1. 学生能够运用所学的知识,分析并设计简单的机器人机构;2. 学生能够运用绘图软件或手工制作,展示机器人机构模型;3. 学生能够通过小组合作,完成机器人机构的搭建和调试。
情感态度价值观目标:1. 培养学生对机器人机构的兴趣,激发他们探索科技的热情;2. 培养学生动手实践、解决问题的能力,增强自信心和成就感;3. 培养学生团队协作、沟通表达的能力,提高责任感和合作意识;4. 培养学生关注我国机器人产业发展,树立科技创新的价值观。
课程性质:本课程为实践性较强的学科课程,结合理论知识与动手操作,培养学生对机器人机构的设计、搭建和创新能力。
学生特点:学生处于好奇心强、动手能力逐渐增强的年级,对新鲜事物充满兴趣,善于合作和探索。
教学要求:注重理论与实践相结合,充分调动学生的积极性,引导他们主动参与课堂活动,培养创新精神和实践能力。
将课程目标分解为具体的学习成果,以便进行有效的教学设计和评估。
二、教学内容1. 机器人机构概述- 了解机器人的定义、发展历程及分类;- 掌握机器人机构的基本组成和功能。
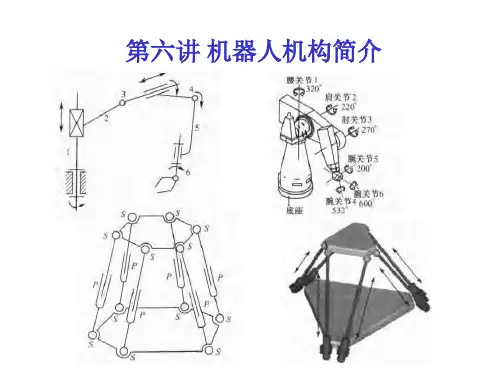
2. 机器人机构的类型与运动特点- 学习不同类型的机器人机构(如:移动机构、关节臂机构、并联机构等);- 分析各类机构的特点、应用场景及其运动原理。
3. 机器人机构的设计与制作- 掌握机器人机构设计的基本原则和方法;- 学习使用绘图软件(如:CAD等)进行机器人机构的设计;- 手工制作机器人机构模型,并进行搭建和调试。
4. 机器人机构的应用案例分析- 分析国内外典型机器人机构应用案例;- 了解机器人机构在工业、医疗、教育等领域的应用现状和发展趋势。
5. 我国机器人产业发展现状与展望- 了解我国机器人产业的发展历程、现状及政策支持;- 探讨机器人产业未来的发展趋势和挑战。

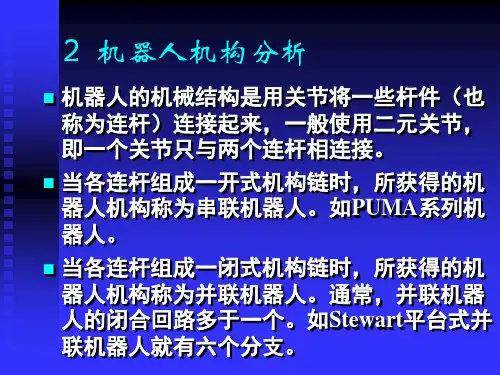
简述机器人的结构组成
机器人的结构组成包括以下几个方面:
1. 机械结构:机器人主要以机械结构为基础,包括机械臂、关节、传动机构、运动控制系统等。
2. 传感器:机器人需要通过传感器获取外界环境信息,例如光电传感器、力传感器、位置传感器等。
3. 控制系统:机器人控制系统包括硬件和软件,用于实现机器人的动作控制、决策和计算等。
4. 电源系统:机器人需要电力供应,通常采用电池或外部电源供电。
5. 末端执行器:根据不同的应用需求,机器人的末端执行器可能是夹具、喷嘴、激光等。
机器人的结构组成因机器人类型和应用场景的不同而异,但以上五个方面是机器人基本结构组成的核心部分。