机器人机构分析与综合课件:卡尔曼滤波
- 格式:ppt
- 大小:610.50 KB
- 文档页数:27




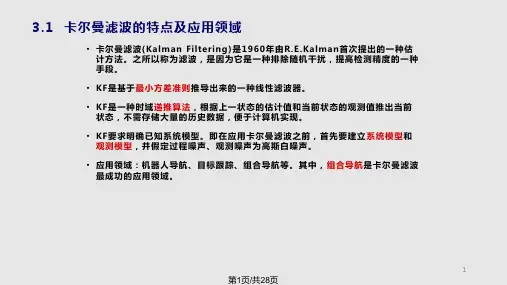

卡尔曼滤波(Kalman Filter)是一种用于估计系统状态的递归算法,通常在控制系统和机器人领域中应用广泛。
它是一种最优估计算法,通过考虑系统的动态模型和传感器测量的不确定性,来融合这些信息以获得对系统状态的最优估计。
在机器人领域,卡尔曼滤波常用于融合来自不同传感器(如陀螺仪、加速度计、磁力计等)的信息,以提高对机器人当前状态的准确性。
简而言之,卡尔曼滤波通过不断地更新和融合测量值和系统模型的信息,提供对系统状态的估计,同时考虑了测量误差和系统动态的不确定性。
这使得卡尔曼滤波在实时系统状态估计中表现良好,特别是在噪声较大的环境中。