【精品】PPT课件 摄像机自标定
- 格式:ppt
- 大小:989.50 KB
- 文档页数:21
1 图像采集系统的标定根据机器视觉系统采集的图像数据来测量焊膏的三维信息,必须准确建立所采集的图像数据和实际物体对象间的成像模型。
同时,图像采集系统不可避免地存在几何畸变。
所以校正几何畸变,并得到检测对象的世界坐标就是图像采集系统标定的工作[5]。
标定中首先要确定图像采集系统的全部参数,包括系统内部的几何和光学特性,即内参数,以及摄像机坐标系相对于空间坐标系的位置关系,即外参数。
确定参数后,根据采集的图像进行校正,并计算得到测量对象的世界坐标。
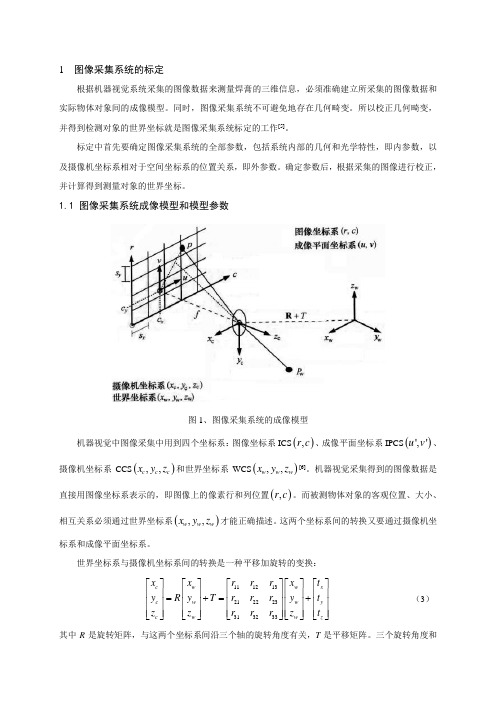
1.1 图像采集系统成像模型和模型参数图1、图像采集系统的成像模型机器视觉中图像采集中用到四个坐标系:图像坐标系ICS (),r c 、成像平面坐标系IPCS ()','u v 、摄像机坐标系CCS (),,c c c x y z 和世界坐标系WCS (),,w w w x y z [6]。
机器视觉采集得到的图像数据是直接用图像坐标系表示的,即图像上的像素行和列位置(),r c 。
而被测物体对象的客观位置、大小、相互关系必须通过世界坐标系(),,w w w x y z 才能正确描述。
这两个坐标系间的转换又要通过摄像机坐标系和成像平面坐标系。
世界坐标系与摄像机坐标系间的转换是一种平移加旋转的变换:111213212223313233c w w x c w w y c w w z x x r r r x t y R y T r r r y t z z r r r z t ⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=+=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦ (3)其中R 是旋转矩阵,与这两个坐标系间沿三个轴的旋转角度有关,T 是平移矩阵。
三个旋转角度和三个平移分量共六个参数(),,,,,x y z t t t αβγ称为成像系统或图像采集系统的外参数。
图像像素坐标系ICS (),r c 和成像平面坐标系IPCS ()','u v 转化是一个离散化和平移的过程,ICS 以图像左上角为原点,以图像的行、列分别为r 轴和c 轴,以整数像素为坐标单位;IPCS 是以光轴与相机像平面的交点为原点,两根坐标轴分别平行于ICS 中的坐标轴,以物理尺寸为坐标单位。


摄像机标定方法及原理摄像机内参数标定方法及原理:1.赋参法:a.使用透镜测量摄像机的焦距,根据透镜公式可求解出摄像机的内参数,如焦距、主点坐标等。
b.使用标准栅格或尺子等物体在距离摄像机一定位置处摆放,通过测量图像上物体的特征点的像素坐标和实际物体的尺寸,对内参数进行估计。
2.视差法:a.使用双目立体视觉系统,通过数学推导得到根据视差计算焦距和主点坐标的公式,从而标定摄像机的内参数。
b.具体操作时,将一张标定板放在双目系统的不同位置处,通过左右摄像机拍摄到的标定板图像,计算出两个图像的视差,进而估计出焦距和主点的坐标。
摄像机外参数标定方法及原理:1.立体视觉法:a.使用双目立体视觉系统,通过测量双目在空间中的位置关系,从而确定摄像机的外参数(即相对于参考坐标系的位置和姿态)。
b.一般情况下,通过观察物体在空间中的三维坐标和其在两个图像上的对应点的像素坐标,可以计算出外参数。
2.惯性传感器法:a.使用惯性传感器等设备,通过测量摄像机在三维空间中的加速度和角速度等信息,可以估计出摄像机的运动轨迹和姿态。
b.参考标定板等物体,在摄像机的运动过程中进行拍摄,根据拍摄到的图像和传感器测量的信息,计算出摄像机的外参数。
摄像机校正方法及原理:1.畸变校正法:a.摄像机的透镜会引入径向畸变和切向畸变,通过收集一组由标定板拍摄得到的图像,并对图像进行处理,去除畸变。
b.基于非线性最小二乘法,对摄像机内参数和畸变系数进行优化,得到校正后的摄像机参数。
2.摄像机自标定法:a.在摄像机运动过程中,摄像机捕捉到的图像中存在物体之间的三维关系,可以通过计算这些三维关系得到摄像机的内外参数。
b.根据三维重建的准确性和稳定性的要求,通过最小二乘法等算法,对摄像机内外参数进行优化。
摄像机标定的原理主要是通过数学模型和图像处理算法对摄像机的成像过程进行建模和估计。
通过收集一系列由标定板或其他具有已知形状和尺寸的物体拍摄得到的图像,分析图像上的特征点和相应的三维物体的几何关系,可以获得摄像机的内外参数。