任务三 识读机用虎钳装配图20161013
- 格式:ppt
- 大小:1.95 MB
- 文档页数:38

苏州高等职业技术学校毕业设计(论文)设计课题:机用虎钳装配图及零件加工工艺和数控编程作者姓名:专业名称:所在班级:指导教师:2015.5机电工程系毕业论文任务书一、题目:机用虎钳装配图及零件加工工艺和数控编程二、指导思想和目的要求:认真负责,独立完成此次毕业设计。
通过这个毕业设计,巩固自己所学的理论知识和技能,提高自己的设计计算、绘图、编写能力,在设计中培养自己的能力和独立工作的能力,为以后从事的工作打下一个良好的基础。
三、进度与要求:第一阶段仔细阅读毕业设计任务书,明确设计的要求和任务第二阶段 1.手工绘制零件图2.手工绘制装配图3.熟悉Proe和word等软件4.用Proe创建零件图5.用Proe组装零件创立装配图6.制定主要加工工艺路线7.数控程序编制第三阶段撰写毕业设计说明书。
整理毕业设计资料。
第四阶段准备答辩四、主要参考书及参考资料:[1] 陈立德.机械设计基础. 北京:高等教育出版社, 2004.[2] 凯德设计.精通Pro/ENGINEER 中文野火版. 北京:中国青年出版社, 2007.[3] 诸小丽. CAD/CAM实体造型教程与实训(Pro/ENGINEER版).北京:北京大学出版社, 2009.[4] 丁淑辉. Pro/Engineer Wildfire4.0基础设计与实践.北京:清华大学出版社, 2008.[5] 张启光.机械制图与计算机绘图.北京:中国铁道出版社,2011.[6] 胡仁喜.张乐乐, 路纯红.Pro/ENGINEER应用教程[M].北京清华大学出版社,2007[7] 陈国聪.CAD/CAM应用软件—PRO/ENGINEER训练教程[M]. 北京:高等教育出版社,2003[8] 邓根清、陈义庄.机械制造基础[M]. 北京:中国林业出版社北京希望电子出版2006班级:专业:学生:指导教师:摘要在机械制造中,工件在机床上进行加工时,应保证工件相对于刀具及切削运动,处于一个正确的空间位置;对于批量生产,还应保证整批工件在同一加工工位上,所占据空间位置不变。
虎钳装配图实训报告:虎钳实训报告装配图机用虎钳的实训报告机械虎钳cad实训报告机用虎钳cad实训篇一:UG虎钳实训报告2013,2014 学年第一学期CAD/CAM软件应用实训说明书(虎钳三维零件数字化设计与零部件装配)姓名朱怀彪学号 3113202033系部机械工程系班级机制132班指导教师郭利成绩安徽国防科技职业学院机械工程系制目录一、…………………………………………工作任务二、………………………………………内容及任务三、…………………………………………心得体会四、…………………………………………参考资料五、…………………………………………成绩评定第一部分工作任务一、实训内容1、机械识图,读图完成平口虎钳设计构思。
2、完成平口虎钳的拆卸和装配,并绘制装配示意图3、绘制组成部件的各零件的草图。
4、绘制虎钳各零部件的三维图形,并将其装配成一个整体;5、通过装配图绘制成爆炸图。
6、对虎钳机构进行运动仿真,观察运动状态,改善零件的三维结构。
二、实训特色在机械制图中,一个完整的设计流程必须有三维造型,三维造型可以更直观的看出图形的形状。
CAD/CAM软件是使学上掌握的一种计算机辅助设计制造软件,能够进行零部件的装配并进行运动仿真和分析。
在CAD/CAM中可以很快的画出平口虎钳的立体造型,通过运动仿真可以直观的看到平口虎钳加紧和松放的整个过程。
通过修改和加深装配图上的颜色颜色可以明确的看出各个零部件。
三、实训摘要虎钳三维零件数字化设计与零部件装配,虎钳主要组成有:固定钳身、钳口板、固定螺钉、活动钳口、丝杠、螺母、垫圈、开槽螺钉等。
虎钳利用丝杠的螺旋齿,来实现夹紧和放松物体。
钳口板与活动钳口都开有2个标准螺纹孔,再通过螺钉与螺纹孔配合,从而将他们固定起来。
固定钳身与钳口板也通过螺钉与螺纹孔配合,从而将他们固定起来,活动钳口开有通孔,用于安装固定螺钉的,通过固定螺钉与螺母配合连接,就这样活动钳口就安装在固定钳身上了。
江苏联合职业技术学校苏州分院苏州高等职业技术学校毕业设计(说明书)设计课题:机用虎钳三维装配图及零件3D打印作者姓名:专业名称:所在班级:指导教师:2015.4江苏联合职业技术学校苏州分院机电工程系毕业论文任务书一、题目:机用虎钳三维装配图及零件3D打印二、指导思想和目的要求:认真负责,一丝不苟,独立完成。
通过这个毕业设计,巩固自己所学的理论知识和技能,提高自己的设计算、绘图、编写技术文件能力,学会正确使用技能资料、便准、手册等工具书,并在设计中培养自己的理论联系实际、严肃认证知的工作作风和独立工作能力,为以后毕生从事技术工作打下一个良好的基础。
三、主要技术指标:掌握必须的机械制图技能;能够运用所学软件对相关零件进行立体建模;能完成零件的三维组装;完成工件3D打印四、进度与要求:第一阶段(4课时)仔细阅读毕业设计任务书,明确设计的要求和任务。
第二阶段(80课时)1.设计零件并绘制零件图;2.绘制装配图;3.熟悉应用软件;4.用所用软件建模;5.用软件进行零件组装6.进行3D打印。
第三阶段(20课时)撰写毕业设计说明书。
整理毕业设计资料。
第四阶段(10课时)准备答辩。
五、主要参考书及参考资料:(1)《机床数控技术基础》(2)《PRO/E中文野火版3.0教程》(3)《数控加工工艺学》(4)《解析3D打印机:3D打印机的科学与艺术》赵志群,陈俊兰. 现代学徒制建设——现代职业教育制度的重要补充.[J].北京社会科学. 2014(1):28-32赵志群. 职业教育工学结合一体化课程开发指南.[M]北京: 清华大学出版社. 2009年版.ISBN 978-7-302-19923-6.班级:专业:学生:指导教师:摘要国际生产研究协会的统计表明,小批多品种生产的工件品种已占工件种类总数的85%左右。
现代生产要求企业所制造的产品品种经常更新换代,以适应市场的需求与竞争。
然而,一般企业都仍习惯于大量采用传统的专用夹具,一般在具有中等生产能力的工厂里,约拥有数千甚至近万套专用夹具;另一方面,在多品种生产的企业中,每隔3~4年就要更新50~80%左右专用夹具,而夹具的实际磨损量仅为10~20%左右。
◆读装配的图要求1、了解装配体的功用、性能和工作原理。
2、弄清各零件间的装配关系和装拆次序。
3、看懂各零件的主要结构形状和作用等。
4、了解技术要求中的各项内容。
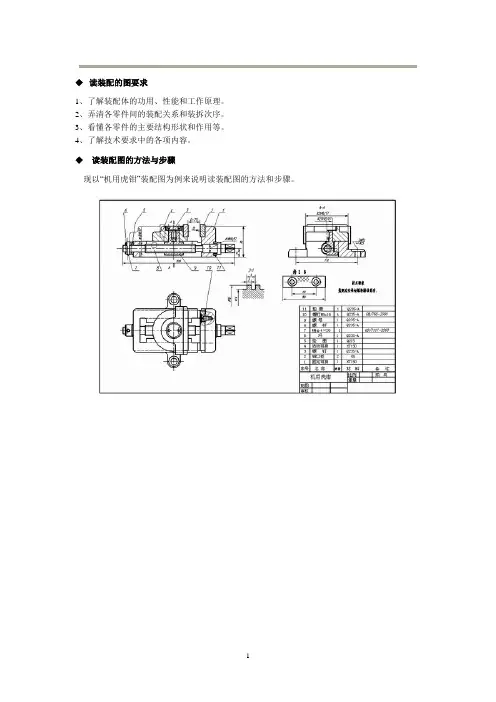
◆读装配图的方法与步骤现以“机用虎钳”装配图为例来说明读装配图的方法和步骤。
机用虎钳的装配示意图下面给出机用虎钳的装配示意图,机用虎钳装配示意图一、概括了解装配图的内容①从标题栏中可以了解装配体的名称、大致用途及图的比例等。
②从零件编号及明细栏中,可以了解零件的名称、数量及在装配体中的位置。
③分析视图,了解各视图、剖视、断面等相互间的投影关系及表达意图。
该装配图大致结构为长方块,规格0~70;读标题栏和明细栏了解部件名称为“机用虎钳”,共有零件11个,其中标准件2个,自制零件九个;各零件的名称、材料和数量;按图上的编号了解各零件的大体装配情况。
二、分析表达方案,细读各视图表达方案:这一组视图由五个视图组成,主、俯、左三个基本视图关系清晰,主视图为全剖视图,并带有局部剖、假想画法;俯视图为局部剖;左视图为半剖视图;另外有局部放大图、端面图、单独零件图。
从部件的装配示意图及拆卸过程可以看出,11种零件有6种零件集中装配在螺杆2上,而且该部件前后对称。
因此,可通过螺杆轴线剖开部件得到全剖的主视图。
这样,其中10种零件在主视图上都可表达出来,能够将零件之间的装配关系、相互位置以及工作原理清晰地表达出来。
左端圆锥销联接处可再用局部剖视图,表达出装配连接关系。
左视图可将螺母轴线及活动钳身放置在固定钳身上安装孔的轴线位置,然后取半剖画出。
这样,半个剖视图上表达了固定钳身1、活动钳身6、螺钉7、螺母8之间的装配连接关系;半个视图上同时表达了虎钳一个方向的外形,内、外形状兼而有之。
俯视图可取外形图,侧重表达机用虎钳的外形,其次在外形图上取局部视图,表达出钳口板的螺钉连接关系。
对于主视图和俯视图也应将螺母及活动钳身放置在与左视图相同的位置画出,以保证视图之间的投影对应关系。
读台虎钳装配图回答问题
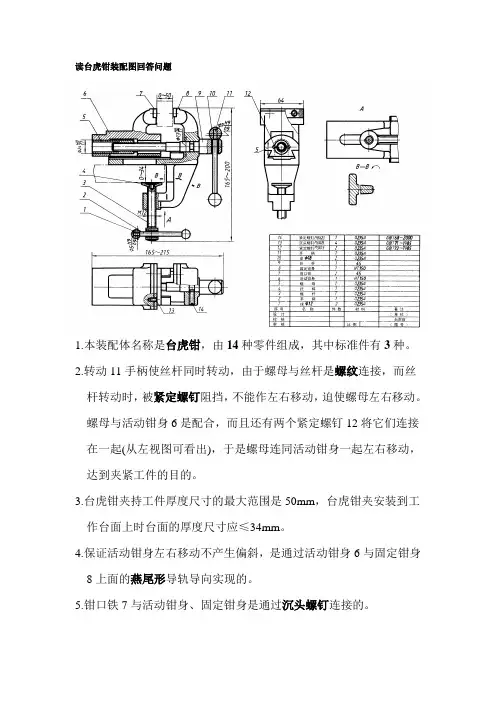
1.本装配体名称是台虎钳,由14种零件组成,其中标准件有3种。
2.转动11手柄使丝杆同时转动,由于螺母与丝杆是螺纹连接,而丝杆转动时,被紧定螺钉阻挡,不能作左右移动,迫使螺母左右移动。
螺母与活动钳身6是配合,而且还有两个紧定螺钉12将它们连接在一起(从左视图可看出),于是螺母连同活动钳身一起左右移动,达到夹紧工件的目的。
3.台虎钳夹持工件厚度尺寸的最大范围是50mm,台虎钳夹安装到工作台面上时台面的厚度尺寸应≤34mm。
4.保证活动钳身左右移动不产生偏斜,是通过活动钳身6与固定钳身8上面的燕尾形导轨导向实现的。
5.钳口铁7与活动钳身、固定钳身是通过沉头螺钉连接的。
6.主视图中φ24H8/f7表示件9丝杆与件8固定钳身之间是基孔制间隙配合.。
虎钳装配图范文装配图是将产品的各个组成部分以及其之间的关系和顺序绘制出来,以指导产品的装配。
下面是虎钳的装配图,详细展示了虎钳的各个组件及其装配顺序。
装配图总体布局:1.装配图呈现为平面视图,以便更清楚地显示虎钳的组成部分和装配顺序。
2.装配图采用比例尺,以确保每个部分的尺寸和位置准确无误。
3.装配图按照从上到下的顺序,逐步展示组件的安装顺序。
4.每个组件标注了名称和编号,以便于识别和定位。
1.虎钳底座(组件编号:1)-底座是虎钳的基础部分,通过螺栓与其他组件连接。
-螺栓位置和规格在图上标注清楚,以确保装配正确。
2.虎钳固定臂(组件编号:2)-固定臂是虎钳的主要支撑结构,用于固定工件。
-固定臂通过螺栓与底座连接,并采用可旋转的结构。
3.虎钳移动臂(组件编号:3)-移动臂是虎钳的移动部分,用于调整和夹紧工件。
-移动臂与固定臂通过螺栓连接,并通过滑轨调整位置。
4.虎钳夹持爪(组件编号:4)-夹持爪是虎钳的夹持部分,用于夹紧工件。
-夹持爪通过螺栓与移动臂连接,并可以自由调整和替换。
5.虎钳控制杆(组件编号:5)-控制杆是虎钳的操作部分,用于控制夹紧爪的运动。
-控制杆通过连杆与夹持爪连接,并通过手柄操作。
6.虎钳齿轮系统(组件编号:6)-齿轮系统是虎钳的动力传递部分,用于实现夹紧爪的运动。
-齿轮系统包括齿轮、链条和传动杆等组件,通过连杆与控制杆和夹持爪连接。
7.虎钳弹簧(组件编号:7)-弹簧是虎钳的重要部分,用于实现夹紧爪的弹性夹紧。
-弹簧通过夹持爪和移动臂连接,并起到稳定和平衡夹紧力的作用。
请注意,以上仅是虎钳装配图的一部分示例,实际虎钳的装配图可能会包含更多的组件和细节。
在操作虎钳时,确保按照装配图上的顺序和规格进行装配,以确保虎钳的正常运行和安全性能。