华中农业大学数学建模A.B课件下载
- 格式:ppt
- 大小:2.55 MB
- 文档页数:115
第一章课程概述§1.1 数学模型与数学建模一.基本概念数学是研究现实世界中数量关系和空间形式的科学。
其产生以及许多重大发展都是和现实世界的生产活动和其他相应学科的需要密切相关的;同时,作为认识和改造世界的强有力的工具,又促进了科学技术和生产建设的发展。
特别在当今时代,由于计算机软硬件的迅速发展和普及,数学方法被广泛应用于生产实践、社会管理的各个领域和层面。
对具体的应用问题或问题类进行合理的简化假设以及适当的抽象并最终表述为某种数学结构,即我们在这里讨论的数学模型,是现代生产实践与社会生活实现优化决策和科学管理的必要环节。
而数学建模则是指根据实际需要或最终管理目标,对现实问题构建数学模型,对模型进行分析求解,并最终将模型解翻译为决策方案应用于实际的一个由诸多环节组成的一个完整过程。
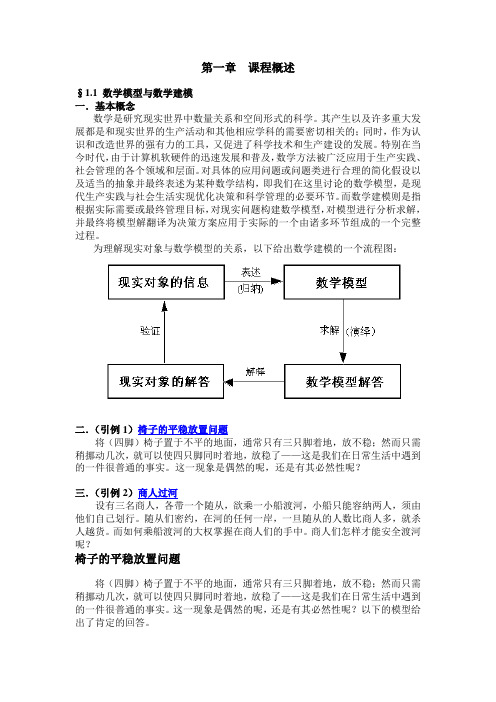
为理解现实对象与数学模型的关系,以下给出数学建模的一个流程图:二.(引例1)椅子的平稳放置问题将(四脚)椅子置于不平的地面,通常只有三只脚着地,放不稳;然而只需稍挪动几次,就可以使四只脚同时着地,放稳了——这是我们在日常生活中遇到的一件很普通的事实。
这一现象是偶然的呢,还是有其必然性呢?三.(引例2)商人过河设有三名商人,各带一个随从,欲乘一小船渡河,小船只能容纳两人,须由他们自己划行。
随从们密约,在河的任何一岸,一旦随从的人数比商人多,就杀人越货。
而如何乘船渡河的大权掌握在商人们的手中。
商人们怎样才能安全渡河呢?椅子的平稳放置问题将(四脚)椅子置于不平的地面,通常只有三只脚着地,放不稳;然而只需稍挪动几次,就可以使四只脚同时着地,放稳了——这是我们在日常生活中遇到的一件很普通的事实。
这一现象是偶然的呢,还是有其必然性呢?以下的模型给出了肯定的回答。
一.模型假设:1.椅子四条腿一样长,椅脚与地面接触处可视为一点,四脚的连线呈正方形;2.地面高度是连续变化的,沿任何方向都不会出现间断(没台阶)。
即地面可视为数学上的连续曲面;3.对于椅脚的间距和椅腿的长度而言,地面是相对平坦的,使椅子在任何位置上至少有三只脚同时着地。


![[课件]数学建模 第八章PPT](https://img.taocdn.com/s1/m/2b0caeed05087632311212db.png)

A题无人机自主飞行航迹规划问题无人机的发展至今已有70多年的历史,其军事应用主要是遂行各种侦察任务。
随着无人机平台技术和机载遥感技术的不断发展,它的军事应用范围已经并将继续扩展,如通信中继、军事测绘、电子对抗、信息攻击等。
特别是精确制导武器技术的发展,又使它成为这种武器的理想平台。
众所周知自主飞行的能力是无人驾驶飞机所必须具有的。
如果要实现无人驾驶飞机的自主飞行,则要求具有相当程度的飞行航迹规划能力。
无人机的航迹规划是为了圆满完成任务而作的计划。
它往往指单机在初始位置、终止位置和一些目标任务结点确定之后的航迹规划问题,其基本功能是根据无人机的性能和飞经的地理环境、威胁环境等因素,对已知的目标规划提出满足要求的航迹,以便在实际飞行时可以根据需要进行实时局部修改。
现在我们讨论如下的情况:假定无人机的活动范围为20km×20km的区域,无人机起点的平面坐标为[1,2](单位:km), 攻击目标的平面坐标为[19,18](单位:km),同时不考虑无人机起飞降落时的限制。
数字地图和敌方威胁情况(主要考虑雷达威胁)已在附件中给出。
数字地图可以做适当的简化,比如可以把地形近似分为三种:高地,低地以及过渡地带。
问题1:忽略地形和无人机操作性能等因素的影响,综合考虑敌方威胁,无人机航程等,基于二维平面建立单机单目标的航迹规划模型。
问题2:把模型扩展到三维空间,并同时考虑无人机的操作性能(主要考虑拐弯)和地形因素。
问题3:试讨论和分析你提出的模型的可行性,并做仿真分析。
附件一:雷达威胁的坐标方位表。
附件二:数字地图。
附件一:雷达威胁的平面坐标方位表起始点坐标[1,2] 目标点坐标[19,18]威胁点1坐标[7,20] 威胁点5坐标[13,4]威胁点2坐标[11,14] 威胁点6坐标[15,18]威胁点3坐标[9,6] 威胁点7坐标[14,17]威胁点4坐标[18,2] 威胁点8坐标[20,14]。