齿轮公法线偏差计算教学提纲
- 格式:doc
- 大小:1.76 MB
- 文档页数:6
齿轮公法线上下偏差计算公式(总3页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--齿轮公法线上下偏差计算公式公法线平均长度上偏差Ews=Es*scosа-2e*sinа,公法线平均长度下偏差Ews=Esi*cosа+2e*sinа,公法线平均长度公差:Tw=Ts*cosа-4esinа,1、式中2e为齿轮一转内最大的几何偏心量,为ΔFr2e=ΔFr=KFr,根据国标取K=,式中Fr齿圈径向跳动公差有精度等级和分度圆直径决定(你未给出分度圆直径及应用,所以我没办法给你准确数,你自己查表)。
2、式中α为压力角,标准渐开线圆柱齿轮α=20°3、式中Ess和Esi为齿轮齿厚上偏差和下偏差,通常齿轮副,两齿轮的Ess相同,Ess=fa*tagа+(jn min+J)/2cosа①式中fa为齿轮副中心距极限偏差,②式中jn min为齿轮副公法线方向极限侧隙,叫作法向极限侧隙,jn min=jn1+jn2jn1=a(α1Δt1+α2Δt2)*2sinа(单位mm)a---齿轮副中心距α1,α2---线膨胀系数(45#钢齿:*10^-6,铸铁箱体:*10^-6)Δt---工作温升(相对于20℃)脚注1为齿轮,脚注2为壳体jn2=K*mn (单位um)mn---法向模数系数K---5~10(油池润滑)10(V<10m/s)齿轮线速度(喷油润滑)20(10<V<25)30(25<v<60)30~50(V>60)Esi=Ess+TsTs=(Fr^2+br^2)^1/2*2tagαFr---齿圈径向跳动(查表)br---切齿径向进刀公差(查表)4、小结要得到公法线长度上下偏差必须根据应用环境来确定精度等级,有三组公差精度分别为:运动精度、平稳性精度、接触精度,示例一、7-6-6GM、示例二、7FL第一个示例表示运动精度7,平稳性精度和接触精度6,G和M代表齿厚上下偏差分别为-6fpt和-20fpt(买本书或下载齿轮手册上面有标准),fpt查表得,它属平稳性精度参数,第二个示例表示三组公差精度都为7,其他同上,只是齿厚公差带偏上一点了,F=-4fpt,L=-16fpt。
2012—2013学年第一学期课程论文论文题目:浅析精密机械齿轮传动中的误差及计算方法课程名称:误差理论与数据处理学院:机电学院专业:机械工程班级:姓名:学号:2013年1月8日目录0 引言 (3)1 齿轮误差来源 (3)1.1 齿轮制造误差 (4)1.1.1 几何偏心e的影响 (4)r1.1.2 运动偏心e的影响 (5)k1.1.3 齿形误差、周节偏差、齿向误差等因素的影响 (5)1.2 齿轮装配误差 (6)2 齿轮传动计算方法 (6)2.1绝对值法 (6)2.2概率法 (6)3误差源的分布 (7)4传动链精度计算 (8)5结语 (9)参考文献 (10)浅析精密机械齿轮传动中的误差及计算方法摘要:齿轮传动是机械传动中最重要的传动形式之一,在精密传动中的应用也很广泛。
精密机械传动对传动精度要求很高,所以,在精密传动中,我们必须要充分考虑齿轮传动中的误差的影响。
本文给出了误差来源、误差分布及相关计算方法。
文中主要分析了传动误差,并给出了空程误差的计算式,没有考虑齿轮传动中的温度、受力变形的影响。
计算方法采用了常用的概率法,这种方法简单,但算出的误差较大,具体计算时应结合实际情况,看此法是否能满足精密传动机械的精度要求。
若不能满足,则需另寻他法。
关键词:齿轮传动精度传动误差A Brief Analysis Of Error And Computing Method InGear Transmission Of Precise MachineryAbstract: Gear transmission is one of the most important mechanical transmission in the form of transmission and is widespread in precision machinery. It requires a high transmission accuracy in Precision mechanical transmission[]1. To meet the requirements, we must fully consider the influence of gear transmission error in precise transmission. In this paper, it gives the source of error, error distribution and computing method. This paper mainly analyzes the transmission error and gives the error calculation of empty-range without considering the influence of temperature and stress deformation. We use the mostly-used probabilistic method to get the result[]2. This method is brief, but the error is too high. In the specific calculation, we should consider the actual situation to see whether this method can meet the demands of thetransmission accuracy in precise machinery. If not, we have to look for other methods. Key words: gear transmission error analysis transmission accuracy.0 引言齿轮传动是机械传动中最重要的传动形式之一,它形式多,应用广泛,传递功率可达数十万千瓦,圆周速度可达300m/s。
![1.12齿轮公法线长度偏差的测量[12页]](https://uimg.taocdn.com/cbe6f83377232f60ddcca1f7.webp)
齿轮公法线长度偏差的测量一、实验目的1. 掌握测量齿轮公法线长度的方法。
2. 加深理解齿轮公法线长度偏差的定义。
二、实验内容用公法线指示卡规测量齿轮公法线长度偏差。
三、测量原理及计量器具说明E是指在齿轮一周范围内,公法线实际长度的平均值与公称值之差。
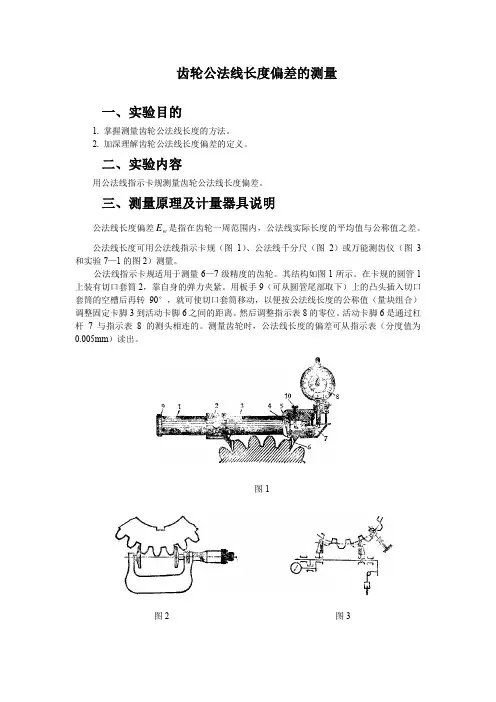
公法线长度偏差w公法线长度可用公法线指示卡规(图1)、公法线千分尺(图2)或万能测齿仪(图3和实验7—1的图2)测量。
公法线指示卡规适用于测量6—7级精度的齿轮。
其结构如图1所示。
在卡规的圆管1上装有切口套筒2,靠自身的弹力夹紧。
用板手9(可从圆管尾部取下)上的凸头插入切口套筒的空槽后再转90°,就可使切口套筒移动,以便按公法线长度的公称值(量块组合)调整固定卡脚3到活动卡脚6之间的距离。
然后调整指示表8的零位。
活动卡脚6是通过杠杆7与指示表8的测头相连的。
测量齿轮时,公法线长度的偏差可从指示表(分度值为0.005mm)读出。
图1图2 图3四、测量步骤1. 按下式计算直齿圆柱齿轮公法线长度W ;W =[]f f f m Zinv n m αξαπαsin 2)5.0(cos ++-式中m ——被测齿轮的模数(mm );f α——齿形角;Z ——被测齿轮齿数;n ——跨齿数(n ≈5.0+Z fπα,取整数)。
当f α=200,变位系数ξ=0时,则[]Z n m W 014.0)12(476.1+-=5.0111.0+=Z nW 和n 值也可以从表1查出。
2. 按公法线长度的公称尺寸组合量块。
3. 用组合好的量块组调节固定卡脚3与活动卡脚6之间的距离,使指示表8的指针压缩一圈后再对零。
然后压紧按钮10,使活动卡脚退开,取下量块组。
4. 在公法线卡规的两个卡脚中卡入齿轮,沿齿圈的不同方位测量4—5个以上的值(最好测量全齿圈值)。
测量时应轻轻摆动卡规,按指针移动的转折点(最小值)进行读数。
读数的值就是公法线长度偏差。
5. 将所有的读数值平均,它们的平均值即为公法线长度偏差E w 。
实验三 齿轮公法线长度偏差的测量一、实验目的1.掌握测量齿轮公法线长度的方法。
2.掌握公法线长度变动与公法线平均长度偏差的计算,理解二者的差别。
二、实验内容用公法线千分尺测量齿轮公法线长度偏差。
三、测量原理与计量器具说明公法线长度变动ΔF W 是指齿轮一周范围内,实际公法线长度的最大值Wmax 与最小值Wmin 之差。
测量ΔFw 可以得到齿距累积误差ΔFp 中的切向误差部分,反映齿轮的运动精度。
公法线平均长度偏差ΔE W m 是指齿轮一周范围内,公法线长度平均值与公称值之差。
本实验采用公法线千分尺来测量公法线长度。
公法线千分尺可用于测量7~9级齿轮,公法线千分尺的外形如图3-1 所示。
它的结构、使用和读数方法与普通千分尺一样,仅量砧制成碟形,以使碟形量砧能伸进齿间进行测量。
测量公法线长度时的跨齿数n 和它的公称值W 分别按下列公式计算: W=mcos α[π(k-0.5)+zinv α]+2xmsin α式中 m 、z 、α、x ——齿轮的模数、齿数、标准压力角、变位系数; inv α——渐开线函数,inv20度为0.014904; k ——测量时的跨齿数(整数)。
跨齿数k 按照量具量仪的测量面与被测齿轮面大体上在齿高中部接触来选择。
对于标准直齿轮,k =z α/180+0.5。
对于变位直齿轮,κ=z αm/180+0.5, αm=arcos[db/(d+2xm)],db 和d 分别为被测齿的基圆直径和分度圆直径; x 为变位系数; inv α 为渐开线函数(inv20°=0.0149)。
n 必须为整数,取成最接近计算值的整数。
为了使用方便,对于 =20°、m = lmm 的标准直齿圆柱齿轮,按上述公式计算出跨齿数n 和公法线长度公称值W ,列于表1.四、实验步骤(1) 用测量公法线长度的办法确定齿轮的模数m 及压力角α等,测量时应先按齿轮的齿数确定跨测齿数k ,见下表。
齿轮公法线偏差计算偏差和齿轮的公法线长度有关,也就是说,同一精度级别的齿轮,由于它的齿数不同,公法线长度是不一样的,同理它的公法线长度的偏差范围也不是一样的。
公法线平均长度上偏差Ews=EsS^scos -2e*sin a, Ess =-4fpt fpt齿距极限偏差(查表)公法线平均长度下偏差Ews=Esi*cos a +2e*sin a , Esi=-16 fpt公法线平均长度公差:Tw=Ts*cosa-4esin a , Ts=12 fpt衰•和齿阜极限倫建1、式中2e为齿轮一转内最大的几何偏心量,为△ Fr2e=A Fr=KFr根据国标取K=0.72,式中Fr齿圈径向跳动公差有精度等级(查表) 和分度圆直径决定2、式中a为压力角,标准渐开线圆柱齿轮 a =20°3、式中Ess和Esi为齿轮齿厚上偏差和下偏差,通常齿轮副,两齿轮的Ess相同,Ess=fa*tag a +(jn mi n+J)/2c=s4Fpt a①式中fa为齿轮副中心距极限偏差,②式中jn min为齿轮副公法线方向极限侧隙,叫作法向极限侧隙,jn mi n=jn1+jn2jn^a( a 1 A t1+ a 2 A t2)*2单位mm)a---齿轮副中心距a 1 a2线膨胀系数(45#钢齿:11.5*10八-6,铸铁箱体:10.5*10八-6)At-工作温升(相对于20C)脚注1为齿轮,脚注2为壳体jn2=K*mn (单位um)mn---法向模数系数K---5~10 (油池润滑)10 (V<10m/s)齿轮线速度(喷油润滑)20 (10<V<25)30(25<v<60)30~50(V>60)Esi=Ess+TsTs=(Fr A2+br A2)A1/2*2tag aFr---齿圈径向跳动(查表)br---切齿径向进刀公差(查表)4、小结要得到公法线长度上下偏差必须根据应用环境来确定精度等级,有三组公差精度分别为:运动精度、平稳性精度、接触精度,示例一、7-6-6GM、示例二、7FL第一个示例表示运动精度7,平稳性精度和接触精度6, G和M代表齿厚上下偏差分别为-6fpt和- 20fpt(买本书或下载齿轮手册上面有标准),fpt查表得,它属平稳性精度参数,第二个示例表示三组公差精度都为7,其他同上,只是齿厚公差带偏上一点了,F=-4fpt,L=-16fpt。
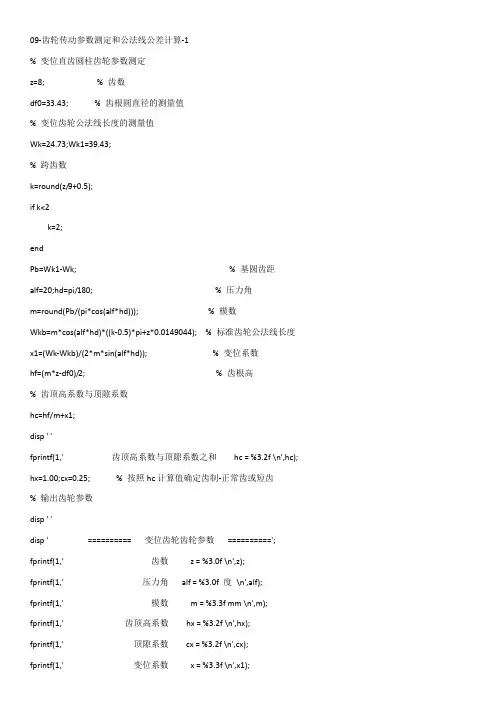
09-齿轮传动参数测定和公法线公差计算-1% 变位直齿圆柱齿轮参数测定z=8; % 齿数df0=33.43; % 齿根圆直径的测量值% 变位齿轮公法线长度的测量值Wk=24.73;Wk1=39.43;% 跨齿数k=round(z/9+0.5);if k<2k=2;endPb=Wk1-Wk; % 基圆齿距alf=20;hd=pi/180; % 压力角m=round(Pb/(pi*cos(alf*hd))); % 模数Wkb=m*cos(alf*hd)*((k-0.5)*pi+z*0.0149044); % 标准齿轮公法线长度x1=(Wk-Wkb)/(2*m*sin(alf*hd)); % 变位系数hf=(m*z-df0)/2; % 齿根高% 齿顶高系数与顶隙系数hc=hf/m+x1;disp ' 'fprintf(1,' 齿顶高系数与顶隙系数之和hc = %3.2f \n',hc); hx=1.00;cx=0.25; % 按照hc计算值确定齿制-正常齿或短齿% 输出齿轮参数disp ' 'disp ' ========== 变位齿轮齿轮参数=========='; fprintf(1,' 齿数z = %3.0f \n',z);fprintf(1,' 压力角alf = %3.0f 度\n',alf);fprintf(1,' 模数m = %3.3f mm \n',m);fprintf(1,' 齿顶高系数hx = %3.2f \n',hx);fprintf(1,' 顶隙系数cx = %3.2f \n',cx);fprintf(1,' 变位系数x = %3.3f \n',x1);disp ' ========== 变位齿轮测量和计算数据=========='fprintf(1,' 跨齿数k = %3.0f \n',k);fprintf(1,' 测量齿根圆直径df0 = %3.3f mm \n',df0);fprintf(1,' 齿根高hf = %3.3f mm \n',hf);fprintf(1,' 基圆齿距Pb = %3.3f mm \n',Pb);fprintf(1,' 测量齿轮公法线长度Wk = %3.3f mm \n',Wk);fprintf(1,' 标准齿轮公法线长度Wkb = %3.3f mm \n',Wkb);% 计算啮合角Qp=2*(x1+x1)*tan(alf*hd)/(z+z)+0.0149044; % 节圆处展角弧度值[x,f]=fsolve('tan(x)-x-0.0688793',0.0149044); % 使用fsolve求解渐开线函数方程alfp=x/hd; % 啮合角disp ' 'disp ' ========== 齿轮副啮合角和渐开线函数值==========';fprintf(1,' 啮合角alfp = %3.3f 度\n',alfp);fprintf(1,' 啮合角渐开线函数值Qp = %3.7f \n',Qp);% 计算中心距、分离系数、齿顶变动系数与几何尺寸a=0.5*m*(z+z); % 标准中心距ap=a*cos(alf*hd)/cos(alfp*hd); % 实际中心距y=(ap-a)/m; % 分离系数sgm=x1+x1-y; % 齿顶变动系数d=m*z; % 分度圆直径db=d*cos(alf*hd); % 基圆直径da=d+2*(hx+x1-sgm)*m; % 齿顶圆直径df=d-2*(hx+cx-x1)*m; % 齿根圆直径Wkp=Wkb+2*x1*m*sin(alf*hd); % 公法线长度% 计算变位齿轮齿厚alfa=acos(db/da); % 齿顶压力角s=pi*m/2+2*x1*m*tan(alf*hd); % 分度圆齿厚sa=s*da/d-da*(tan(alfa)-alfa-0.0149044); % 齿顶圆齿厚sb=cos(alf*hd)*(s+d*0.0149044); % 基圆齿厚disp ' ========== 变位齿轮齿厚和啮合角=========='; fprintf(1,' 分度圆齿厚s = %3.3f mm \n',s); fprintf(1,' 齿顶圆齿厚sa = %3.3f mm \n',sa); fprintf(1,' 基圆齿厚sb = %3.3f mm \n',sb); fprintf(1,' 齿顶压力角alfa = %3.3f 度\n',alfa/hd); fprintf(1,' 啮合角alfp = %3.3f 度\n',alfp);disp ' 'disp ' ========== 变位齿轮参数和几何尺寸=========='; fprintf(1,' 中心距分离系数y = %3.3f \n',y);fprintf(1,' 齿顶变动系数sgm = %3.3f \n',sgm);fprintf(1,' 标准中心距 a = %3.3f mm \n',a); fprintf(1,' 实际中心距ap = %3.3f mm \n',ap); fprintf(1,' 齿顶圆直径da = %3.3f mm \n',da); fprintf(1,' 分度圆直径 d = %3.3f mm \n',d); fprintf(1,' 基圆直径db = %3.3f mm \n',db); fprintf(1,' 齿根圆直径df = %3.3f mm \n',df); fprintf(1,' 公法线长度Wkp = %3.3f mm \n',Wkp);% 根据基圆齿厚、模数和压力角计算变位系数x2=(sb/(m*cos(alf*hd))-0.5*pi-0.0149044*z)/(2*tan(alf*hd));fprintf(1,' 变位系数x = %3.3f \n',x2);。
齿厚偏差与公法线偏差-概述说明以及解释1.引言1.1 概述概述:齿厚偏差和公法线偏差是机械工程中两个关键的概念,它们在齿轮制造和齿轮系统的性能方面都起着重要的作用。
齿厚偏差指的是实际齿轮齿厚和理论设计齿厚之间的差异,而公法线偏差则是实际齿轮的法线方向与理论设计齿轮法线方向之间的差异。
在齿轮传动中,齿厚偏差的存在会直接影响齿轮的传动比和运动精度。
如果齿厚偏差过大,会导致齿轮之间的啮合紧密度不均匀,从而影响传动效率和传动噪声。
因此,控制齿厚偏差是确保齿轮传动正常运行和提高其使用寿命的重要措施。
同时,齿厚偏差的测量方法和控制措施也是齿轮制造中需要关注的重点。
公法线偏差则是刻度测量中的另一个重要参数。
它直接关系到齿轮传动的工作效率和精度。
如果公法线偏差过大,会导致齿轮齿面之间的啮合紧密度不均匀,从而使得传动过程中出现过大的能量损耗和传动噪声。
因此,减小公法线偏差是提高齿轮传动效率和稳定性的重要措施。
测量和控制公法线偏差的方法也是齿轮制造中的关键技术之一。
本文将深入讨论齿厚偏差和公法线偏差的定义、影响因素以及测量方法和控制措施。
通过对这两个重要参数的研究,可以为齿轮制造和齿轮系统的性能提升提供重要参考和指导。
1.2 文章结构3. 正文3.1 齿厚偏差3.1.1 定义和影响因素3.1.2 测量方法和控制措施3.2 公法线偏差3.2.1 定义和影响因素3.2.2 测量方法和控制措施4. 结论4.1 齿厚偏差的重要性4.2 公法线偏差的重要性在此篇长文中,主要讨论了齿厚偏差与公法线偏差的问题。
文章结构主要包括引言、正文和结论三个部分。
引言部分概述了文章的主题,并对齿厚偏差和公法线偏差的范围进行了简要介绍。
文章结构部分则进一步说明了本文的组织框架,包括正文的内容和结论的要点。
正文部分首先详细阐述了齿厚偏差的定义和相关影响因素。
齿厚偏差是指实际齿轮的齿厚与设计齿厚之间的差异。
文章还介绍了测量齿厚偏差的方法和控制措施,帮助读者了解如何减少齿厚偏差对齿轮性能的影响。
实验10 齿轮公法线平均长度偏差的测量1.实验目的1.1掌握公法线长度测量的基本方法。
1.2加深理解公法线平均长度偏差指标的意义。
2.实验设备绝对法测量用公法线千分尺;相对法测量用万能测齿仪及附件,量块。
3. 实验原理与方案公法线长度W是指基圆切线与齿轮上两异名齿廓交点间的距离。
公法线平均长度偏差Ew:是指在齿轮一周范围内,公法线长度平均值Wk与公称值W之差.由图10-1知,当被测齿轮齿厚发生变化时,公法线长度也相应发生变化。
因此公法线平均长度偏差∆Ew是评定齿侧间隙的一个指标。
取公法线长度平均值是为消除运动偏心对公法线长度的影响。
图10-1公法线千分尺测量示意图图10-2万能测齿仪测量∆Fw和∆Ew公法线测量可采用具有两个平行测量面,且能插入被测齿轮相隔一定齿数的齿槽中的量具或仪器,如公法线千分尺、万能测齿仪等。
在大批量生产中,还可以采用公法线极限量规进行测量。
图10-1为公法线千分尺测量示意图。
该量具的结构、使用方法及读数原理同普通千分尺,只是测量面制成盘形,以便于伸入齿间进行测量。
图10-2为用万能测齿仪测量公法线长度示意图。
固定测刀1,其工作面在重锤作用下始终与被测齿廓右侧在分度圆附近接触;活动侧刀2,它与指示表3接触,在弹簧4推力作用下其工作面与被测齿廓左侧面接触,当被测齿轮公法线发生变化时,两侧刀工作面的距离相对公法线公称长度发生微小变动,并如∆实反映在指示表上。
球形测头5用于确定齿轮的周向位置。
4. 实验步骤、方法与注意事项4.1 测量公法线长度时,其公法线公称长度W、跨齿数n 计算:式中:m--模数、 inv --渐开线函数 、--齿形角、x --变位系数、z--被测齿轮齿数,对于标准直齿轮则有: n ≈0.111+0.5 其中n 取成最接近计算值的整数,也可按表10-1选取。
4.2.1 用公法线千分尺测量首先用标准量棒校对所用千分尺的零位。
根据跨齿数n 按图10-1所示对被测齿轮逐齿测量或沿齿圈均布测量八条或更多公法线长度,所测得各个公法线长度偏差都在其上、下偏差范围内,才判断为合格。
实验七齿轮公法线长度变动和公法线平均长度偏差的测量
一、测量原理与器具
公法线长度变动ΔFw是指在齿轮一周范围内,实际公法线长度的最大值Wmax与最小值Wmin之差。
测量ΔFw可以得到齿距累积误差ΔFp中的切向误差部分,反映齿轮的运动精度。
公法线平均长度Δwm则是指在齿轮一周范围内,公法线实际长度的平均值与公称值之差。
因公法线长度是由若干个基节Pb和一个基圆齿厚Ss组成,而基节偏差比齿厚偏差小得多,故公法线平均长度偏差Δwm主要反映被测齿轮的齿侧间隙。
公法线长度可用公法线千分尺(如图3-27)、公法线指示卡规(图3-28)或万能测齿仪等测量。
本实验采用公法线百分尺测量。
公法线千分尺是在普通千分尺上安装两个大平面测头,其读数方法与普通千分尺相同。
二、测量步骤
1、确定被测齿轮的跨齿数K,并计算公法线公称长度W。
当测量一压力角为20°的非变位直齿圆柱齿轮时:
W= m•[ 1.4761×(2K – 1) + 0.014Z]
式中: m——模数 Z——齿数 K——跨齿数
2、根据公法线公称长度W选取适当规格的分法线千分尺并校对零位。
3、测量公法线长度:根据选定的跨齿数K用公法线千分尺测量沿被测齿轮圆周均布的5条公法线长度。
4、计算公法线平均长度偏差Δwm:取所测5个实际公法线长度的平均值W 后减去公称公法线长度,即为公法线平均长度偏差Δwm。
5、计算公法线长度变动ΔFw:取5个实际公法线长度中的最大值与最小值之差,为公法线平均长度变动ΔFw。
三、填写测量报告单
按步骤完成测量并将被测件的相关信息、测量结果及测量条件填入测量报告单7~12中。
齿轮公法线测量一、实验目的1.熟悉齿轮公法线长度及其变动的测量方法;2.熟悉齿轮公法线平均长度偏差的测量方法;3.练习齿轮公差表格的查阅。
二、测量原理与器具公法线长度变动Fw 是指在齿轮一周X围内,实际公法线长度的最大值Wmax 与最小值 Wmin 之差。
测量Fw 可以得到齿距累积误差Fp 中的切向误差局部,这一误差主要是由于齿轮加工机床传动中分度蜗轮的回转中心与机床主轴〔或工作台〕的旋转中心不重合而产生的〔通常称作运动偏心〕。
它使得同一齿轮上的基节或基圆齿厚不均匀,从而影响齿轮在传动中传动比变化的准确性。
Fw 主要反映由于运动偏心而造成的齿轮切向长周期误差。
图 1用公法线指示卡规测量公法线长度图2用公法线百分尺测量公法线长度公法线平均长度 wm 那么是指在齿轮一周X围内,公法线实际长度的平均值与公称值之差。
因公法线长度是由假设干个基节 Pb 和一个基圆齿厚 Ss 组成,而基节偏差比齿厚偏差小得多,故公法线平均长度偏差wm 主要反映被测齿轮的齿侧间隙。
公法线长度可用公法线千分尺〔如图 1〕、公法线指示卡规〔图 2〕或万能测齿仪等测量。
本实验采用公法线百分尺测量。
公法线千分尺是在普通千分尺上安装两个大平面测头,其读数方法与普通千分尺一样。
三、测量步骤1、确定被测齿轮的跨齿数K ,并计算公法线公称长度W 。
当测量一压力角为20°的非变位直齿圆柱齿轮时:W= m · [ 1.4761 × (2K –1) + 0.014Z]5式中:m——模数Z——齿数K ——跨齿数跨齿数 K = Z / 9 + 0.5 或按下表选取:齿数Z10~ 1819~ 2728~3637~ 45⋯⋯跨齿数K2345⋯⋯2、根据公法线公称长度W 选取适当规格的分法线千分尺并校对零位。
3、测量公法线长度:根据选定的跨齿数K 用公法线千分尺测量沿被测齿轮圆周均布的条公法线长度。
4、计算公法线平均长度偏差wm :取所测 5 个实际公法线长度的平均值W 后减去公称公法线长度,即为公法线平均长度偏差wm 。
齿轮公法线偏差计算
偏差和齿轮的公法线长度有关,也就是说,同一精度级别的齿轮,由于它的齿数不同,公法线长度是不一样的,同理它的公法线长度的偏差范围也不是一样的。
公法线平均长度上偏差Ews=Ess*scosа-2e*sinа, Ess =-4fpt fpt齿距极限偏差(查表)
公法线平均长度下偏差Ews=Esi*cosа+2e*sinа, Esi=-16 fpt
公法线平均长度公差:Tw=Ts*cosа-4esinа, Ts=12 fpt
1、式中2e为齿轮一转内最大的几何偏心量,为ΔFr
2e=ΔFr=KFr,根据国标取K=0.72,式中Fr齿圈径向跳动公差有精度等级(查表)和分度圆直径决定
2、式中α为压力角,标准渐开线圆柱齿轮α=20°
3、式中Ess和Esi为齿轮齿厚上偏差和下偏差,通常齿轮副,两齿轮的Ess相同,
Ess=fa*tagа+(jn min+J)/2cosа=-4Fpt
①式中fa为齿轮副中心距极限偏差,
②式中jn min为齿轮副公法线方向极限侧隙,叫作法向极限侧隙,
jn min=jn1+jn2
jn1=a(α1Δt1+α2Δt2)*2sinа(单位mm)
a---齿轮副中心距
α1,α2---线膨胀系数(45#钢齿:11.5*10^-6,铸铁箱体:10.5*10^-6)
Δt---工作温升(相对于20℃)
脚注1为齿轮,脚注2为壳体
jn2=K*mn (单位um)
mn---法向模数
系数K---5~10(油池润滑)
10(V<10m/s)齿轮线速度(喷油润滑)
20(10<V<25)
30(25<v<60)
30~50(V>60)
Esi=Ess+Ts
Ts=(Fr^2+br^2)^1/2*2tagα
Fr---齿圈径向跳动(查表)
br---切齿径向进刀公差(查表)
4、小结
要得到公法线长度上下偏差必须根据应用环境来确定精度等级,有三组公差精度分别为:运动精度、平稳性精度、接触精度,示例一、7-6-6GM、示例二、7FL
第一个示例表示运动精度7,平稳性精度和接触精度6,G和M代表齿厚上下偏差分别为-6fpt和-
20fpt(买本书或下载齿轮手册上面有标准),fpt查表得,它属平稳性精度参数,第二个示例表示三组公差精度都为7,其他同上,只是齿厚公差带偏上一点了,F=-4fpt,L=-16fpt。
汽车变速箱齿轮采用的是6级精度,一般7级精度差不多足够,有的地方要求低的可取更低精度,还有一般高速级齿轮副侧隙(公法线上偏差绝对值)应该留大一点,速度快齿轮副温升高,相对热膨胀大(齿轮副和壳体),同时高速级在前端,对回差影响不大。
invα公式
invα在手册中有表可查当手头没有手册, 则可按下式计算: invα=tgα-α等号右边第一项的α是角度值, 而第二项, α是弧度值, 计算时很不方便。
为此, 将此式改为invα=tgα- απ/180则可直接利用计算器来计算, 很为方便
精品资料
仅供学习与交流,如有侵权请联系网站删除谢谢5
精品资料。