第四章 控制系统的传递函数(1)
- 格式:ppt
- 大小:967.00 KB
- 文档页数:15
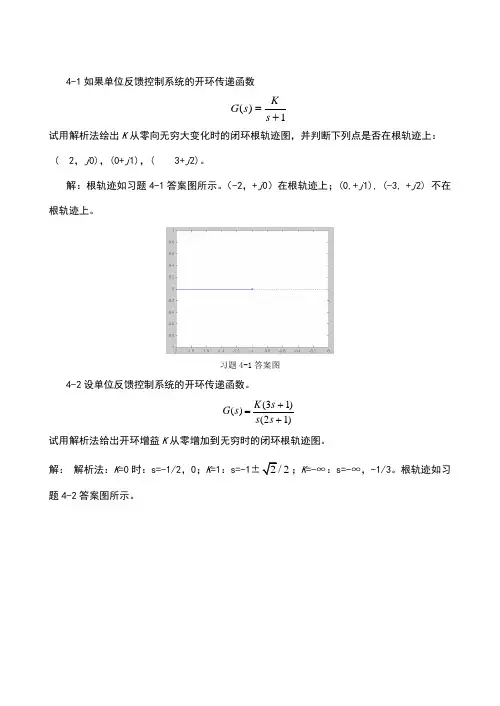
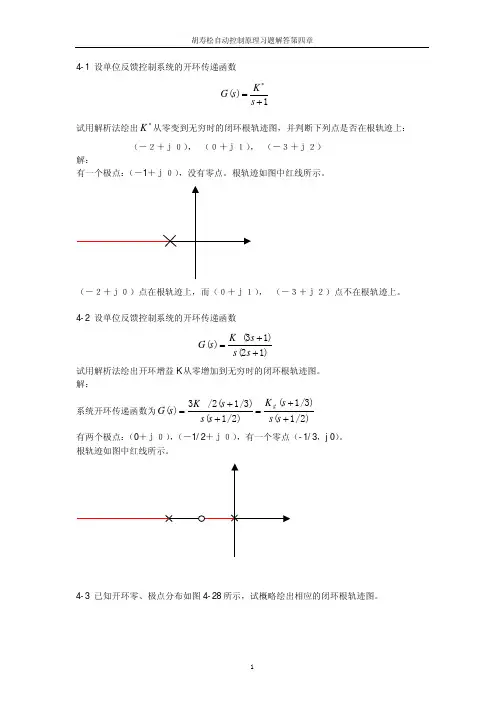
4-1如果单位反馈控制系统的开环传递函数1)(+=s K s G 试用解析法绘出K 从零向无穷大变化时的闭环根轨迹图,并判断下列点是否在根轨迹上: (2,j 0),(0+j 1),(3+j 2)。
解:根轨迹如习题4-1答案图所示。
(-2,+j 0)在根轨迹上;(0,+j 1), (-3, +j 2) 不在根轨迹上。
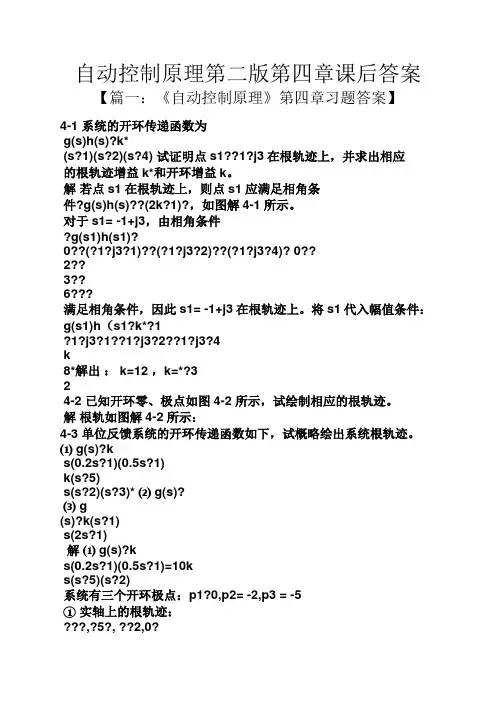
习题4-1答案图4-2设单位反馈控制系统的开环传递函数。
)12()13()(++=s s s K s G试用解析法给出开环增益K 从零增加到无穷时的闭环根轨迹图。
解: 解析法:K =0时:s=-1/2,0;K =1:s=-122;K =-∞:s=-∞,-1/3。
根轨迹如习题4-2答案图所示。
习题4-2答案图4-3 已知系统的开环传递函数)1()1()()(-+=s s s K s H s G ,试按根轨迹规则画出该系统的根轨迹图,并确定使系统处于稳定时的K 值范围。
解:分离点:;会合点: ;与虚轴交点:±j 。
稳定的K 值范围:K >1。
根轨迹如习题4-3答案图所示。
习题4-3答案图4-4已知一单位反馈系统的开环传递函数为2*)4)(1)(1()(+-+=s s s K s G (1)试粗略画出K *由0到∞的根轨迹图;(2)分析该系统的稳定性。
解:稳定性分析:系统不稳定。
根轨迹如习题4-4答案图所示。
-10-505-8-6-4-22468Root LocusReal AxisI m a g i n a r y A x i s习题4-4答案图4-5 设控制系统的开环传递函数为)164)(1()1()()(2*++-+=s s s s s K s H s G ,试绘制系统根轨迹图,并确定使系统稳定的开环增益范围。
解:渐近线:=60°,180°;=-2/3;复数极点出射角55°;分离会合点和;与虚轴交点和;使系统稳定的开环增益为 <K < (即 <K *<。
自动控制原理第二版第四章课后答案【篇一:《自动控制原理》第四章习题答案】4-1 系统的开环传递函数为g(s)h(s)?k*(s?1)(s?2)(s?4) 试证明点s1??1?j3在根轨迹上,并求出相应的根轨迹增益k*和开环增益k。
解若点s1在根轨迹上,则点s1应满足相角条件?g(s)h(s)??(2k?1)?,如图解4-1所示。
对于s1= -1+j3,由相角条件?g(s1)h(s1)?0??(?1?j3?1)??(?1?j3?2)??(?1?j3?4)? 0??2??3??6???满足相角条件,因此s1= -1+j3在根轨迹上。
将s1代入幅值条件: g(s1)h(s1?k*?1?1?j3?1??1?j3?2??1?j3?4k8*解出: k=12 ,k=*?324-2 已知开环零、极点如图4-2 所示,试绘制相应的根轨迹。
解根轨如图解4-2所示:4-3 单位反馈系统的开环传递函数如下,试概略绘出系统根轨迹。
⑴ g(s)?ks(0.2s?1)(0.5s?1)k(s?5)s(s?2)(s?3)* ⑵ g(s)?⑶ g(s)?k(s?1)s(2s?1)解⑴ g(s)?ks(0.2s?1)(0.5s?1)=10ks(s?5)(s?2)系统有三个开环极点:p1?0,p2= -2,p3 = -5①实轴上的根轨迹:???,?5?, ??2,0?0?2?57?????a??33②渐近线: ????(2k?1)????,?a?33?③分离点:1d?1d?5?1d?2?0解之得:d1??0.88,d2?3.7863(舍去)。
④与虚轴的交点:特征方程为 d(s)=s3?7s2?10s?10k?0?re[d(j?)]??7?2?10k?0令 ? 3im[d(j?)]????10??0?解得?????k?7。
根轨迹如图解4-3(a)所j)与虚轴的交点(0,?示。
⑵根轨迹绘制如下:①实轴上的根轨迹:??5,?3?, ??2,0?0?2?3?(?5)????0a??2②渐近线: ????(2k?1)????a?22?③分离点: 1d?1d?2?1d?3?1d?5用试探法可得 d??0.886。
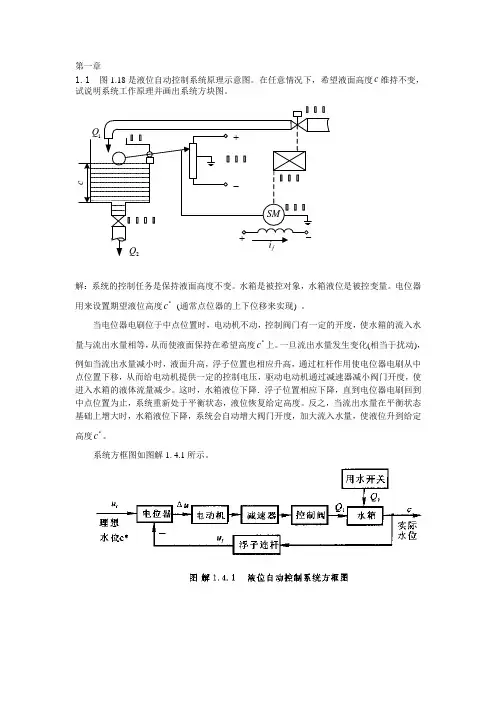
第一章1.1 图1.18是液位自动控制系统原理示意图。
在任意情况下,希望液面高度c维持不变,试说明系统工作原理并画出系统方块图。
c+-SM___ 1Q浮浮浮浮浮浮2Q浮浮浮浮浮浮浮浮浮浮浮浮fi-+解:系统的控制任务是保持液面高度不变。
水箱是被控对象,水箱液位是被控变量。
电位器用来设置期望液位高度*c(通常点位器的上下位移来实现) 。
当电位器电刷位于中点位置时,电动机不动,控制阀门有一定的开度,使水箱的流入水量与流出水量相等,从而使液面保持在希望高度*c上。
一旦流出水量发生变化(相当于扰动),例如当流出水量减小时,液面升高,浮子位置也相应升高,通过杠杆作用使电位器电刷从中点位置下移,从而给电动机提供一定的控制电压,驱动电动机通过减速器减小阀门开度,使进入水箱的液体流量减少。
这时,水箱液位下降.浮子位置相应下降,直到电位器电刷回到中点位置为止,系统重新处于平衡状态,液位恢复给定高度。
反之,当流出水量在平衡状态基础上增大时,水箱液位下降,系统会自动增大阀门开度,加大流入水量,使液位升到给定高度*c。
系统方框图如图解1. 4.1所示。
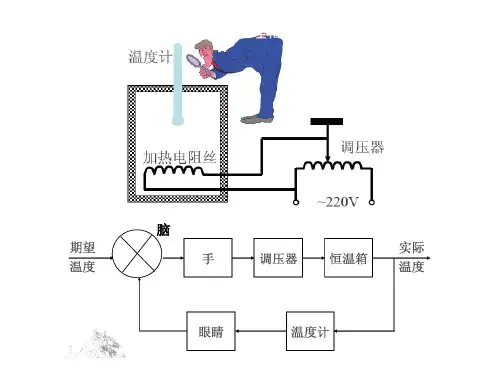
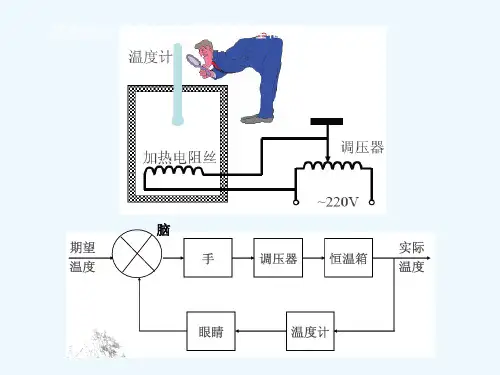
1.2恒温箱的温度自动控制系统如图1.19所示。
(1) 画出系统的方框图;(2) 简述保持恒温箱温度恒定的工作原理;(3) 指出该控制系统的被控对象和被控变量分别是什么。
器~图1.19 恒温箱的温度自动控制系统解:恒温箱采用电加热的方式运行,电阻丝产生的热量与调压器电压平方成正比,电压增高,炉温就上升。
调压器电压由其滑动触点位置所控制,滑臂则由伺服电动机驱动.炉子的实际温度用热电偶测量,输出电压作为反馈电压与给定电压进行比较,得出的偏差电压经放大器放大后,驱动电动机经减速器调节调压器的电压。
在正常情况下,炉温等于期望温度T ,热电偶的输出电压等于给定电压。
此时偏差为零,电动机不动,调压器的滑动触点停留在某个合适的位置上。
这时,炉子散失的热量正好等于从电阻丝获取的热量,形成稳定的热平衡状态,温度保持恒定。
《控制工程基础》第四章习题解题过程和参考答案4-1 设单位反馈系统的开环传递函数为:10()1G s s =+。
当系统作用有下列输入信号时:()sin(30)r t t =+︒,试求系统的稳态输出。
解:系统的闭环传递函数为:10()()11()()1()111C s G s s s R s G s Φ===++这是一个一阶系统。
系统增益为:1011K =,时间常数为:111T =其幅频特性为:()A ω=其相频特性为:()arctan T ϕωω=- 当输入为()sin(30)r t t =+︒,即信号幅值为:1A =,信号频率为:1ω=,初始相角为:030ϕ=︒。
代入幅频特性和相频特性,有:1(1)A ====11(1)arctan arctan5.1911T ωϕω==-=-=-︒所以,系统的稳态输出为:[]()(1)sin 30(1)24.81)c t A A t t ϕ=⋅⋅+︒+=+︒4-2 已知系统的单位阶跃响应为:49()1 1.80.8(0)ttc t e e t --=-+≥。
试求系统的幅频特性和相频特性。
解:对输出表达式两边拉氏变换:1 1.80.8361()49(4)(9)(1)(1)49C s s s s s s s s s s =-+==++++++由于()()()C s s R s =Φ,且有1()R s s =(单位阶跃)。
所以系统的闭环传递函数为:1()(1)(1)49s s sΦ=++ 可知,这是由两个一阶环节构成的系统,时间常数分别为:1211,49T T == 系统的幅频特性为二个一阶环节幅频特性之积,相频特性为二个一阶环节相频特性之和:12()()()A A A ωωω===1212()()()arctan arctan arctanarctan49T T ωωϕωϕωϕωωω=+=--=--4-3 已知系统开环传递函数如下,试概略绘出奈氏图。
(1)1()10.01G s s =+ (2)1()(10.1)G s s s =+(3))1008()1(1000)(2+++=s s s s s G (4)250(0.61)()(41)s G s s s +=+ 解:手工绘制奈氏图,只能做到概略绘制,很难做到精确。
4-1将下述特征方程化为适合于用根轨迹法进行分析的形式,写出等价的系统开环传递函数。
(1)210s cs c +++=,以c 为可变参数。
(2)3(1)(1)0s A Ts +++=,分别以A 和T 为可变参数。
(3)1()01I D P k k s k G s ss τ⎡⎤+++=⎢⎥+⎣⎦,分别以P k 、I K 、T 和τ为可变参数。
4-2设单位反馈控制系统的开环传递函数为(31)()(21)K s G s s s +=+试用解析法绘出开环增益K 从0→+∞变化时的闭环根轨迹图。
4-2已知开环零极点分布如下图所示,试概略绘出相应的闭环根轨迹图。
4-3设单位反馈控制系统的开环传递函数如下,试概略绘出相应的闭环根轨迹图(要求确定分离点坐标)。
(1)()(0.21)(0.51)KG s s s s =++(2)(1)()(21)K s G s s s +=+(3)(5)()(2)(3)K s G s s s s +=++4-4已知单位反馈控制系统的开环传递函数如下,试概略绘出相应的闭环根轨迹图(要求算出起始角)。
(1)(2)()(12)(12)K s G s s s j s j +=+++-(2)(20)()(1010)(1010)K s G s s s j s j +=+++-4-5设单位反馈控制系统开环传递函数如为*2()()(10)(20)K s z G s s s s +=++试确定闭环产生纯虚根1j ±的z 值和*K 值。
4-6已知系统的开环传递函数为*22(2)()()(49)K s G s H s s s +=++试概略绘出闭环根轨迹图。
4-7设反馈控制系统中*2()(2)(5)KG s s s s =++(1)设()1H s =,概略绘出系统根轨迹图,判断闭环系统的稳定性(2)设()12H s s =+,试判断()H s 改变后的系统稳定性,研究由于()H s 改变所产生的影响。
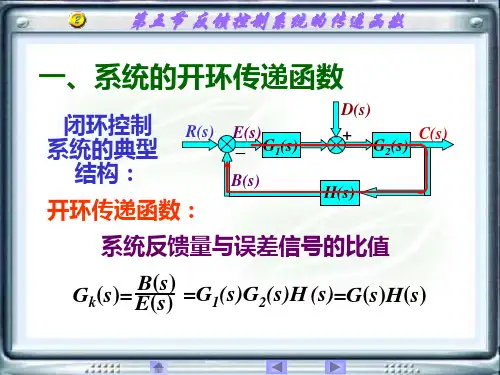
自动控制原理传递函数
自动控制原理是指使用控制器对系统进行控制的一种方法。
在控制系统中,常常使用传递函数来描述系统的动态特性。
传递函数可以理解为输入与输出之间的数学关系,它可以表示为:
G(s) = Y(s) / U(s)
其中,G(s)表示传递函数,Y(s)表示输出信号的 Laplace 变换, U(s)表示输入信号的 Laplace 变换,s表示复变量。
为了进行系统的分析与设计,可以从传递函数的特性出发,了解系统的频率响应、稳态误差、稳定性等重要信息。
在传递函数的分析中,常常需要考虑传递函数的零点和极点。
零点是使得传递函数为零的点,而极点是使得传递函数为无穷大的点。
零点与极点的位置对于系统的稳定性和动态特性有着重要的影响。
当进行控制系统的设计时,可以通过调整传递函数的参数来实现期望的控制效果。
常见的控制方法包括比例控制、积分控制和微分控制,通过调整这些控制参数,可以实现系统的稳定性和响应速度的要求。
总之,传递函数是自动控制原理中的重要工具,通过分析传递函数的特性,可以更好地理解和设计控制系统。
形考任务1一、判断题(共20道,每道2分)自动控制就是在人直接参与的情况下,利用控制装置使生产过程的输出量按照给定的规律运行或变化。
[答案]错反馈控制系统通常是指正反馈。
[答案]错所谓反馈控制系统就是的系统的输出必须全部返回到输入端。
[答案]错给定量的变化规律是事先不能确定的,而输出量能够准确、迅速的复现给定量,这样的系统称之为随动系统。
[答案]对自动控制技不能提高劳动生产率。
[答案]错对于一般的控制系统,当给定量或扰动量突然增加时,输出量的暂态过程一定是衰减振荡。
[答案]错对于一般的控制系统,当给定量或扰动量突然增加某一给定值时,输出量的暂态过程可能出现单调过程。
[答案]对被控制对象是指要求实现自动控制的机器、设备或生产过程。
[答案]对任何物理系统的特性,精确地说都是非线性的,但在误差允许范围内,可以将非线性特性线性化。
[答案]对自动控制中的基本的控制方式有开环控制、闭环控制和复合控制。
[答案]对一个动态环节的传递函数为1/s,则该环节为一个微分环节。
[答案]错控制系统的数学模型不仅和系统自身的结构参数有关,还和外输入有关。
[答案]错控制系统的传递函数取决于自身的结构与参数,和外输入无关。
[答案]:对传递函数模型可以用来描述线性系统,也可以用来描述非线性系统。
[答案]错系统的传递函数为则该系统有两个极点。
[答案]错传递函数是物理系统的数学模型,但不能反映物理系统的性质,因而不同的物理系统能有相同的传递函数。
[答案]对某环节的输出量与输入量的关系为y(t)=Kx(t),K是一个常数,则称其为比例环节。
[答案]对对于同一系统,根据所研究问题的不同,可以选取不同的量作为输入量和输出量,所得到的传递函数模型是不同的。
[答案]对在零初始条件下,传递函数定义为输出和输入之比。
[答案]错控制系统传递函数分子中s的最高阶次表示系统的阶数。
[答案]错开环控制系统的精度主要取决于。
[答案]D.系统的校准精度反馈控制系统通常是指。