第四章 控制系统的传递函数(2)
- 格式:ppt
- 大小:779.50 KB
- 文档页数:22
自动控制原理第二版第四章课后答案【篇一:《自动控制原理》第四章习题答案】4-1 系统的开环传递函数为g(s)h(s)?k*(s?1)(s?2)(s?4) 试证明点s1??1?j3在根轨迹上,并求出相应的根轨迹增益k*和开环增益k。
解若点s1在根轨迹上,则点s1应满足相角条件?g(s)h(s)??(2k?1)?,如图解4-1所示。
对于s1= -1+j3,由相角条件?g(s1)h(s1)?0??(?1?j3?1)??(?1?j3?2)??(?1?j3?4)? 0??2??3??6???满足相角条件,因此s1= -1+j3在根轨迹上。
将s1代入幅值条件: g(s1)h(s1?k*?1?1?j3?1??1?j3?2??1?j3?4k8*解出: k=12 ,k=*?324-2 已知开环零、极点如图4-2 所示,试绘制相应的根轨迹。
解根轨如图解4-2所示:4-3 单位反馈系统的开环传递函数如下,试概略绘出系统根轨迹。
⑴ g(s)?ks(0.2s?1)(0.5s?1)k(s?5)s(s?2)(s?3)* ⑵ g(s)?⑶ g(s)?k(s?1)s(2s?1)解⑴ g(s)?ks(0.2s?1)(0.5s?1)=10ks(s?5)(s?2)系统有三个开环极点:p1?0,p2= -2,p3 = -5①实轴上的根轨迹:???,?5?, ??2,0?0?2?57?????a??33②渐近线: ????(2k?1)????,?a?33?③分离点:1d?1d?5?1d?2?0解之得:d1??0.88,d2?3.7863(舍去)。
④与虚轴的交点:特征方程为 d(s)=s3?7s2?10s?10k?0?re[d(j?)]??7?2?10k?0令 ? 3im[d(j?)]????10??0?解得?????k?7。
根轨迹如图解4-3(a)所j)与虚轴的交点(0,?示。
⑵根轨迹绘制如下:①实轴上的根轨迹:??5,?3?, ??2,0?0?2?3?(?5)????0a??2②渐近线: ????(2k?1)????a?22?③分离点: 1d?1d?2?1d?3?1d?5用试探法可得 d??0.886。
《控制工程基础》第四章习题解题过程和参考答案4-1 设单位反馈系统的开环传递函数为:10()1G s s =+。
当系统作用有下列输入信号时:()sin(30)r t t =+︒,试求系统的稳态输出。
解:系统的闭环传递函数为:10()()11()()1()111C s G s s s R s G s Φ===++这是一个一阶系统。
系统增益为:1011K =,时间常数为:111T =其幅频特性为:()A ω=其相频特性为:()arctan T ϕωω=- 当输入为()sin(30)r t t =+︒,即信号幅值为:1A =,信号频率为:1ω=,初始相角为:030ϕ=︒。
代入幅频特性和相频特性,有:1(1)A ====11(1)arctan arctan5.1911T ωϕω==-=-=-︒所以,系统的稳态输出为:[]()(1)sin 30(1)24.81)c t A A t t ϕ=⋅⋅+︒+=+︒4-2 已知系统的单位阶跃响应为:49()1 1.80.8(0)ttc t e e t --=-+≥。
试求系统的幅频特性和相频特性。
解:对输出表达式两边拉氏变换:1 1.80.8361()49(4)(9)(1)(1)49C s s s s s s s s s s =-+==++++++由于()()()C s s R s =Φ,且有1()R s s =(单位阶跃)。
所以系统的闭环传递函数为:1()(1)(1)49s s sΦ=++ 可知,这是由两个一阶环节构成的系统,时间常数分别为:1211,49T T == 系统的幅频特性为二个一阶环节幅频特性之积,相频特性为二个一阶环节相频特性之和:12()()()A A A ωωω===1212()()()arctan arctan arctanarctan49T T ωωϕωϕωϕωωω=+=--=--4-3 已知系统开环传递函数如下,试概略绘出奈氏图。
(1)1()10.01G s s =+ (2)1()(10.1)G s s s =+(3))1008()1(1000)(2+++=s s s s s G (4)250(0.61)()(41)s G s s s +=+ 解:手工绘制奈氏图,只能做到概略绘制,很难做到精确。
自动控制原理传递函数
自动控制原理是指使用控制器对系统进行控制的一种方法。
在控制系统中,常常使用传递函数来描述系统的动态特性。
传递函数可以理解为输入与输出之间的数学关系,它可以表示为:
G(s) = Y(s) / U(s)
其中,G(s)表示传递函数,Y(s)表示输出信号的 Laplace 变换, U(s)表示输入信号的 Laplace 变换,s表示复变量。
为了进行系统的分析与设计,可以从传递函数的特性出发,了解系统的频率响应、稳态误差、稳定性等重要信息。
在传递函数的分析中,常常需要考虑传递函数的零点和极点。
零点是使得传递函数为零的点,而极点是使得传递函数为无穷大的点。
零点与极点的位置对于系统的稳定性和动态特性有着重要的影响。
当进行控制系统的设计时,可以通过调整传递函数的参数来实现期望的控制效果。
常见的控制方法包括比例控制、积分控制和微分控制,通过调整这些控制参数,可以实现系统的稳定性和响应速度的要求。
总之,传递函数是自动控制原理中的重要工具,通过分析传递函数的特性,可以更好地理解和设计控制系统。
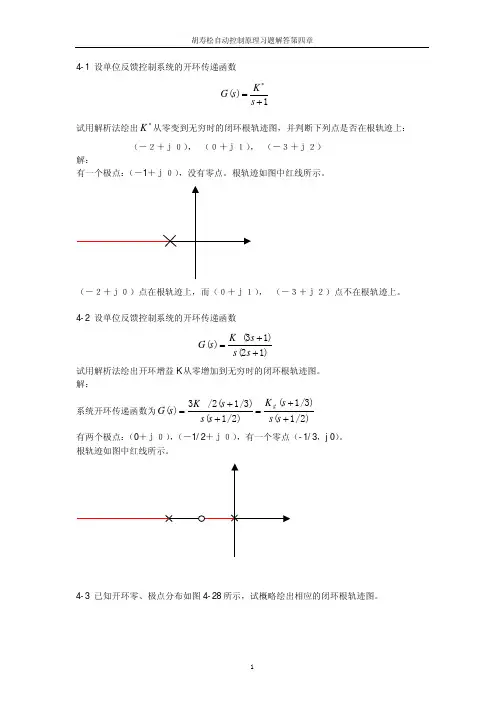
第四章 根轨迹分析法习题4-2 单位回馈控制系统的开环传递函数1)(+=s K s G r,试用解析法绘出r K 从零变化到无穷时的死循环根轨迹图,并判断-2, j1, (-3+j2)是否在根轨迹上。
解:1-s 01s 0r=⇒=+=时,K2-s 02s 1r=⇒=+=时,K3-s 03s 2r=⇒=+=时,K……-2 在根轨迹上,(-3+j2),j1不在根轨迹上。
4-3 回馈控制系统的开环传递函数如下,0≥r K ,试画出各系统的根轨迹图。
(2) )4)(1()5.1()(+++=s s s s K s G r (3) 2)1()(+=s s K s G r ,解:(2)1)开环零、极点:p 1=0,p 2=-1,p 3=-4,z=-1.0,n=3,m=1 2)实轴上根轨迹段:(0,-1),(-1.5,-4) 3)根轨迹的渐近线:︒±=±=-+±=-=----=902)12(,75.12)5.1(410)2( ππϕσm n k aa夹角交点条渐近线4)分离点和会合点6.05.1141111-=+=++++d d d d d 试探法求得(3)1)开环零、极点:p 1=0,p 2,3=-1,n=32)实轴上根轨迹段:(0,-1),(-1,-∞) 3)根轨迹的渐近线:±=-+±=-=--=3)12(,323110)3( ππϕσm n k aa夹角交点条渐近线4)分离点和会合点310121-=⇒=++d d d 5)与虚轴交点:223++s s4-5 系统的开环传递函数为)1()2()(++=s s s K s G r ,(1) 画出系统的根轨迹,标出分离点和会合点;(2) 当增益r K 为何值时,复数特征根的实部为-2?求出此根。
解: (1)1)开环零、极点:p 1=0,p 22)实轴上根轨迹段:(0,-13)分离点和会合点.3,586.02111121-=-=⇒+=++d d d d d123s s s s r2K -r21 1K rKj,202rr±==⇒=-s K K(2)系统特征方程为02)1(rr2=+++K s K s2j 2322122,1rr±-==-=+-=-s K Ka b ,,得:由4-6 单位回馈系统的前向信道函数为)3)(1()(++=s s s K s G r,为使死循环主导极点具有阻尼比5.0=ξ,试确定r K 的值。